

chirskii-lectures-4sem
.pdf2) dx dy = −dy dx
Для дифференциальной формы определено дифференцирование, обладающее свойствами:
1) d(ω1 +ω2 ) = dω1 + dω2
2)d( (ω1 ω2 ) = dω1 dω2 + (−1)k ω1 dω2 , где k – степень формы ω2
3) d(dω) = 0
Следуя этим правилам, вычислим: d(Pdx) = dP dx + Pd( fx) = dP dx , т.к. P –
формулой нулевой степени. Например,
dω1 = d(Pdx +Qdy + Rdz) = d(Pdx) + d(Qdy) +
=dP dx + dQ dy + dR dz = ∂∂P dx + ∂∂P dy
x y
d(Rdz) =
+ ∂∂P dz dx + z
|
∂Q |
|
∂Q |
|
∂Q |
|
|
+ |
|
dx + |
|
dy + |
|
dz |
|
|
|
|
|||||
|
∂x |
|
∂y |
|
∂z |
|
|
|
|
|
|
|
|
∂R |
|
∂R |
|
∂R |
|
dy + |
|
dx + |
|
dy + |
|
dz dz = |
|
|
|
||||
|
∂x |
|
∂y |
|
∂z |
|
|
|
|
|
=∂∂Px dx dx + ∂∂Py dy dx + ∂∂Pz dz dx + ∂∂Qx dx dy + ∂∂Qy dy dy + + ∂∂Qz dz dy + ∂∂Rx dx dz + ∂∂Ry dy dz + ∂∂Rz dz dz =
=− ∂∂P dx dy + ∂∂P dz dx + ∂∂Q dx dy + ∂∂R dy dz + − ∂∂Q dy dz + − ∂∂R dz dx =y z x y z x
|
∂Q |
|
∂P |
|
|
∂P |
|
∂R |
|
|
∂R |
|
∂Q |
|
|
= |
− |
dx dy + |
− |
x dz dx + |
− |
dy dz |
|||||||||
|
|
|
|
|
|
||||||||||
|
∂x |
|
∂y |
|
|
∂z |
|
∂y |
|
|
∂y |
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|||||||
Полученный результат даёт повод вспомнить теорему Стокса.
Далее, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
d(ω2 ) = d(Rdx dy + Qdz dx + Pdy dz) = dR dx dy + |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
∂R |
|
∂R |
|
|
|
∂R |
|
|
|
|
|
|
|
||
+ dQ dz dx + dP dy dz = |
|
dx + |
dy + |
dz |
dx dy |
+ |
|
||||||||||||||||
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
∂x |
∂y |
|
|
∂z |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
∂Q |
|
∂Q |
|
∂Q |
|
|
|
|
|
∂P |
|
|
|
∂P |
|
|
∂P |
|
|
|
||
+ |
dx + |
dy + |
dz |
dz dx + |
dx + |
dy + |
dz |
dy dz = |
|||||||||||||||
|
|
|
|
|
|
||||||||||||||||||
|
∂x |
∂y |
∂z |
|
|
|
|
|
∂x |
|
|
∂y |
|
∂z |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
= ∂∂Rx dx dx dy + ∂∂Ry dy dx dy + ∂∂Rz dz dx dy + ∂∂Qx dx dz dx +
51

+∂∂Qy dy dz dx + ∂∂Qz dz dz dx + ∂∂Px dx dy dz +
+∂∂P dy dy dz + ∂∂P dz dy dz = ∂∂P + ∂∂R + ∂∂Q dx dy dz y z x z y
так как dz dx dy = −dx dz dy = dx dy dz .
Полученный результат даёт повод вспомнить теорему Остроградского.
52
Приложения кратных, криволинейных и поверхностных интегралов. Элементы теории поля.
1. Скалярное и векторное поле
Определение. Скалярное поле на области D R 3 ( D R 2 ) представляет собой произвольную функцию U (M ), определенную на D, M D .
Поверхности уровня скалярного поля – это множества решений уравнения U (M )= C, C R при заданных значениях C .
Пример. На географической карте линии уровня (двумерный аналог поверхности уровня) показывают точки, лежащие на одной высоте. Аналогичные примеры – изотермы, изобары и т.д.
Векторное поле F на области D R 3 (или D R 2 ) – это вектор, координаты которого (P, Q, R) являются функциями, определенными на D .
Примеры представляют собой силовое поле, поле скоростей и т.п.
2.Производная скалярного поля по направлению. Градиент скалярного поля
Во 2-м семестре мы уже рассматривали производную плоского поля (т.е.
D R 2 ) по направлению l , |
∂U |
. Понятие величины отрезка M 0 M |
|
∂l |
|||
|
|
определяется аналогично и для D R 3 . Напоминаем: величина M 0 M отрезка
M 0 M представляет собой его длину со знаком “+”, если векторы M 0 M и l
одинаково направлены и длину со знаком “-”, если их направления
противоположны. Тогда, по определению, ∂U = |
lim |
U (M )−U (M 0 ) |
. |
|
|||
∂l |
M →M 0 |
M 0 M |
|
|
|||
53
|
|
|
|
|
|
|
|
|
|
Если |
введена система прямоугольных |
|||||||||
|
|
|
|
|
|
|
|
|
|
декартовых координат и вектор |
|
задан |
||||||||
|
|
|
|
|
|
|
|
|
l |
|||||||||||
|
|
|
|
|
|
|
|
|
|
направляющими косинусами (cosα, cos β, cosγ ), |
||||||||||
|
|
|
|
|
|
|
|
|
|
то при условии дифференцируемости U |
в т. |
|||||||||
|
|
|
|
|
|
|
|
|
|
M 0 легко вывести формулу: |
|
|||||||||
|
∂U |
(M 0 )= |
∂U |
(M 0 )cos |
α + |
∂U |
(M 0 )cos β + |
∂U |
(M 0 )cosγ = (gradU , l |
), |
где |
|||||||||
|
|
∂x |
|
|
|
|||||||||||||||
|
∂l |
|
|
|
|
|
|
∂y |
|
∂z |
|
|||||||||
|
|
|
|
∂U |
|
|
∂U |
|
|
∂U |
|
|
||||||||
gradU (M 0 ) |
= |
|
(M 0 ), |
(M 0 ), |
(M 0 ) - градиент скалярного поля U в точке |
|||||||||||||||
|
|
|
|
|||||||||||||||||
|
|
|
|
∂x |
|
∂y |
|
|
|
∂z |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
M 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Разумеется, понятие градиента можно ввести и без использования
системы |
|
координат: |
∂U |
|
|
gradU |
|
|
|
|
|
cosφ = |
|
gradU |
|
cosφ , т.к. |
|
- единичный |
||||||||||||
= |
|
|
|
l |
|
|
|
l |
||||||||||||||||||||||
∂l |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
∂U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
вектор. |
Таким образом, |
|
|
|
≤ |
|
gradU |
|
, причем равенство |
|
наступает при |
|||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||
|
∂l |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂U |
|
|
|
|
|
|
|
||
условии |
|
cosφ |
|
=1. Наибольшее |
значение |
|
|
по всем выборам |
|
, таким |
||||||||||||||||||||
|
|
|
|
l |
||||||||||||||||||||||||||
|
|
|
|
∂l |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
образом, есть grad(U (M 0 )) , а направление градиента – это как раз тот вектор l , на котором это наибольшее значение достигается. Итак, направление и модуль вектора определено без использования координат. Это
говорит об инвариантности этого понятия и о наличии реальных естественнонаучных интерпретаций.
Однако для вычисления градиента удобно его координатное представление. Из него, в частности, легко следуют свойства градиента.
1.grad(u + v)= gradu + gradv
2.grad(c u)= cgradu, c = const
3.grad(u v)= ugradv + vgradu
4.grad(u v)= vgradu − ugradv , v ≠ 0
v2
5.gradf (u)= f ′(u)gradu ( f - дифференцируемая функция)
54
|
|
Пример. |
Найдем gradr , |
где |
r = r = |
x2 |
+ y 2 |
+ z 2 |
- модуль радиус-вектора |
|||||||||||
|
|
(x, y, z). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
∂r = |
|
|
|
x |
|
|
|
, |
∂r |
= |
y |
, |
∂r |
= |
z |
и |
||
|
|
dx |
x2 + y 2 + z 2 |
∂y |
|
x2 + y 2 + z 2 |
∂z |
x2 + y 2 + z 2 |
||||||||||||
|
|
x |
|
y |
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
r |
. |
|
|
|
|
|
|
|
|
||||||
gradr = |
|
, |
|
, |
|
|
= |
|
|
|
|
|
|
|
|
|
|
|||
|
r |
|
r |
|
|
|
|
|
|
|
|
|||||||||
|
|
r |
|
|
r |
|
|
|
|
|
|
|
|
|
|
|||||
По формуле 5 из этого равенства следует: gradf (r)= f ′(r) rr
Мы получили формулу для вычисления градиента радиальной функции
f (r).
Рассмотрим теперь поверхность уровня скалярного поля U , т.е. поверхность, задаваемую уравнением U (x, y, z)= C . Предположим, что U -
непрерывно дифференцируемая функция от x, y, z . Тогда уравнение касательной плоскости в точке M 0 , лежащей на этой поверхности, имеет вид
∂U |
(M 0 )(x − x0 )+ |
∂U |
(M 0 )(y − y0 )+ |
∂U |
(M 0 )(z − z0 )= 0 . |
|
|
|
|||
∂x |
∂y |
∂z |
|||
Координаты вектора градиента представляют собой коэффициенты этого уравнения. Поэтому gradU (M 0 ) - нормаль к касательной плоскости в т. M 0 и,
по определению, нормаль к самой поверхности уровня в этой точке.
3. Поток вектора через поверхность. Дивергенция векторного поля. Векторная формулировка теоремы ОстроградскогоГаусса
Пусть F - векторное поле, S - двусторонняя поверхность. Пусть выбрана
сторона, т.е. нормаль n . Назовем ∫∫(F n)dS - потоком вектора F через
S
поверхность S в указанную сторону.
55

представляет собой скорость изменения количества протекающей через S жидкости в рассматриваемый момент времени.
|
|
|
Пусть векторное поле |
F |
|
задано в |
|
выбранной |
системе |
|
координат |
как |
|||||||||||||||||||||||||||||||||||
|
|
(P, Q, R). Назовем дивергенцией |
|
|
|
скалярное поле div |
|
= |
∂P |
+ |
∂Q |
+ |
∂R |
|
|
(при |
|||||||||||||||||||||||||||||||
|
F |
F |
|
|
F |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
∂y |
∂z |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|||||
условии, что эти частные производные существуют). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
Легко доказать, что: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
1. div( |
|
+ |
|
|
|
)= div |
|
|
+ div |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
a |
b |
a |
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
2. div(U |
|
)=Udiv |
|
+ |
|
gradU . |
Здесь |
U |
- |
|
скалярное |
поле и символ |
|
gradU |
||||||||||||||||||||||||||||||
|
|
|
a |
a |
a |
a |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
обозначает скалярное произведение этих векторов. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
Вспомним |
формулировку |
|
|
теоремы |
Остроградского-Гаусса: |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂P |
|
|
|
∂Q |
|
|
∂R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
(P cosα +Qcos β + R cosγ )dS = |
|
|
|
|
|
|
|
|
|
|
|
|
F = (P, Q, R) |
|
||||||||||||||||||||||||||||||
|
∫∫ |
|
|
|
+ |
+ |
|
dxdydz , |
где |
- |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫∫∫ |
∂x |
∂y |
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
непрерывно дифференцируемое векторное поле, S - замкнутая поверхность, |
|||||||||||||||||||||||||||||||||||||||||||||||
ограничивающая объем V и (cosα, cos β, cosγ ) - вектор внешней нормали. |
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
Левая часть формулы имеет вид ∫∫( |
|
|
|
)dS , т.е. представляет собой поток |
||||||||||||||||||||||||||||||||||||||||
|
|
|
F |
n |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
через внешнюю сторону S , |
а правую часть можно выразить следующим |
||||||||||||||||||||||||||||||||||||||||||||
|
F |
||||||||||||||||||||||||||||||||||||||||||||||
56
образом: |
∫∫∫div |
|
Fdxdydz . Итак, векторная |
|
формулировка теоремы |
||||
|
|||||||||
|
V |
|
|
|
|
||||
Остроградского-Гаусса: |
|
|
|
|
|||||
При сформулированных выше условиях ∫∫( |
|
|
|
)dS = ∫∫∫div |
|
Fdxdydz . |
|||
F |
n |
|
|||||||
|
|
|
S |
|
V |
||||
Понятие divF можно определить независимым от координат способом.
Для этого рассмотрим точку M 0 , окружим ее шаром радиуса ε |
и применим |
||||||
теорему Остроградского-Гаусса: ∫∫( |
|
|
|
)dS = ∫∫∫div |
|
Fdxdydz , |
где Vε - |
F |
n |
|
|||||
Sε |
|
|
|
Vε |
|
||
вышеупомянутый шар, а Sε - внешняя сторона ограничивающей его сферы. К
правой части применим теорему о среднем (учитывая непрерывность divF ):
∫∫∫div |
|
Fdxdydz = div |
|
|
|
(M1 ) |
4 |
πε3 , |
где |
M1 |
- близкая |
к |
M 0 точка. |
При ε → 0 |
||||||||||||||||||||
|
F |
|||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||
Vε |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
div |
|
|
(M1 )→ div |
|
(M 0 ) |
|
и |
мы |
можем |
определить |
дивергенцию |
равенством: |
||||||||||||||||||||||
F |
F |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
∫∫( |
|
|
|
)dS |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
(M0 )= lim |
F |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
div |
|
Sε |
|
|
, |
в правой |
части которого |
система |
координат не |
|||||||||||||||||||||||||
F |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
ε→0 |
|
4 3πε3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
фигурирует. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Если считать |
|
|
|
вектором скорости жидкости, |
то div |
|
- |
это плотность |
|||||||||||||||||||||||||
|
F |
|
|
F |
||||||||||||||||||||||||||||||
|
|
|
|
< 0 . |
|
|
|
|
|
|||||||||||||||||||||||||
источника, если divF |
> 0 , или стока, если divF |
|
|
|
|
|
||||||||||||||||||||||||||||
4. Соленоидальное поле
Определение. F - соленоидальное поле, если divF = 0 .
Векторная линия обладает тем свойством, что в любой ее точке вектор касательной к линии совпадает с F .
Векторная трубка – это совокупность векторных линий.
57
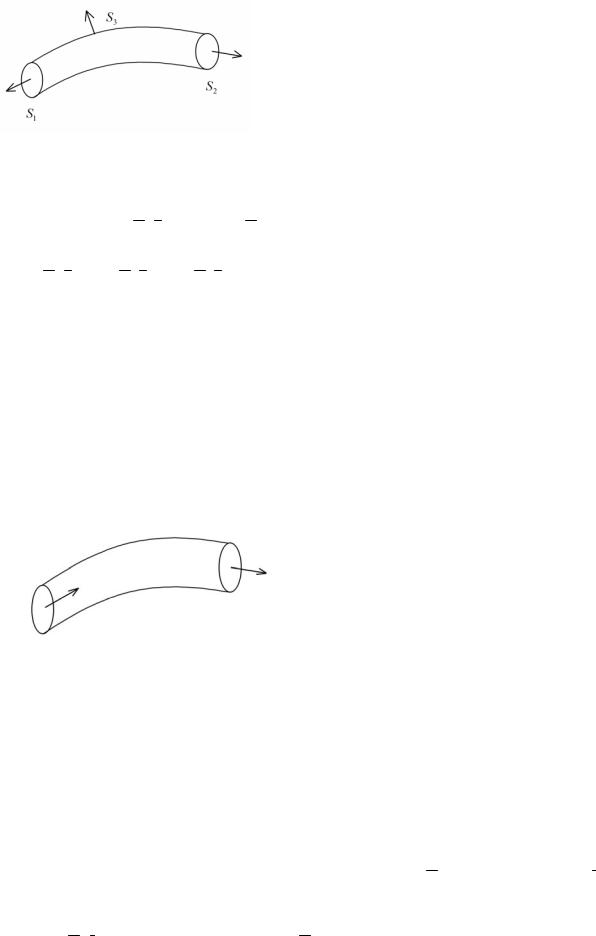
Пусть S1, S2 - сечения векторной трубки и S3 |
- ее боковая поверхность. |
S = S1 US2 US3 . Рассмотрим внешнюю нормаль к |
S и применим теорему |
Остроградского: ∫∫F n dS = ∫∫∫divFdxdydz = 0 , в случае соленоидального поля.
S V
Итак, ∫∫F ndS + ∫∫F ndS + ∫∫F ndS = 0 . На S3 по определению векторной линии
S1 S2 S3
|
|
|
= 0 , поэтому ∫∫ |
|
|
|
|
|
|
|
|
или − ∫∫ |
|
|
|
|
|
|
|
|
F |
n |
F |
ndS + ∫∫F ndS = 0 |
F |
ndS = ∫∫F ndS . Изменяя |
|||||||||||||||
|
|
|
S2 |
|
|
|
S1 |
S1 |
|
|
|
S2 |
||||||||
направление нормали на S1 на противоположное получаем, что поток соленоидального поля через поперечные сечения векторных трубок постоянен.
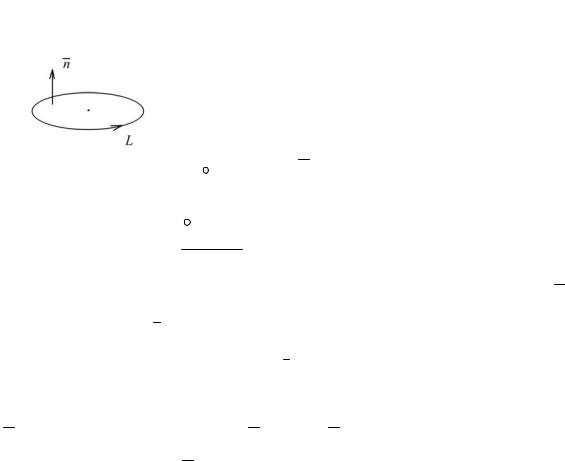
5. Циркуляция, ротор. Векторная формулировка теоремы Стокса
Пусть L - контур с заданным направлением обхода, F - векторное поле, l - единичный вектор касательной к кривой. Определим циркуляцию как
интеграл  ∫(F l)dl (смысл – работа силы F вдоль контура L ).
∫(F l)dl (смысл – работа силы F вдоль контура L ).
L
58

|
|
Введем систему координат. Пусть |
(cosα0 , cos β0 , cosγ 0 ) - |
|
направляющие |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
косинусы |
|
|
, (P, Q, R) - координаты |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
l |
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
Тогда |
( |
|
|
|
|
|
)dl = (P cosα0 |
+ Q cos β0 + R cosγ 0 )dl = Pdx + Qdy + Rdz = |
|
|
|
|
и |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
F |
l |
Fd r |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
циркуляция представляет собой интеграл ∫Pdx + Qdy + Rdz . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для заданного непрерывно-дифференцируемого поля |
|
|
(P, Q, R) |
определим |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
F |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ротор (или вихрь) этого поля: |
|
|
|
|
|
∂R |
|
∂Q |
|
|
∂P |
|
∂R |
|
∂Q |
|
|
∂P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
− |
, |
|
− |
, |
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
rotF = |
∂y |
∂z |
|
∂z |
|
|
∂x |
∂x |
∂y |
. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
Легко проверить свойства ротора. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
1. |
rot( |
|
|
+ |
|
|
)= rot |
|
|
|
|
+rot |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
a |
b |
a |
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
2. |
rot(U |
|
)=Urot |
|
|
+ gradU × |
|
, |
где |
под |
gradU × |
|
|
|
понимаем |
|
|
|
|
векторное |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
a |
a |
a |
a |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
произведение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
Вспомним |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
теперь |
|
|
|
|
|
|
|
|
теорему |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Стокса: |
||||||||||||||||||||||||||||||
∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂R ∂Q |
|
∂P ∂R |
|
|
|
|
|
|
|
∂Q ∂P |
|
|
||||||||||||||||||||||||||||||||||||
Pdx |
+ Qdy + Rdz = |
∫∫ |
|
|
|
− |
|
|
|
|
|
|
|
|
|
− |
|
|
|
dz dx |
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
∂y |
|
|
|
|
dy dz + |
∂z |
|
|
|
|
+ |
∂x |
|
|
|
∂y |
dx dy |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
∂z |
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
, где P, Q, R - непрерывно дифференцируемые функции, |
S |
|
- кусочно-гладкая |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
поверхность, L - ее край, причем направление обхода L относительно |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
выбранной стороны S является положительным. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Вспомним, |
что |
|
dy dz = cosαdS , |
dz dx = cos βdS , |
|
|
dxdy = cosγdS , |
где |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
cosα, cos β, cosγ - направляющие косинусы к выбранной стороне. |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂R |
|
|
|
∂Q |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
||||||||||
|
|
При этом правая часть формулы Стокса принимает вид ∫∫ |
|
∂y |
∂z |
cosα + |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
||||||||
|
∂P ∂R |
|
|
|
∂Q |
|
|
∂P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
∫∫ |
(rotF n)dS . Итак, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
+ |
|
− |
|
|
cos β |
+ |
|
|
|
− |
|
|
|
cosγ dS или |
|
в сделанных выше |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
∂z |
|
∂x |
|
|
|
∂x |
|
|
|
∂y |
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
предположениях теорема Стокса выглядит так: |
∫Fd r = ∫∫(rotF n)dS . |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Получим определение rot |
|
без использования системы координат. Пусть |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
F |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
M 0 - |
точка, |
Sε |
|
- плоскость, |
в которой лежит окружность |
|
Lε |
|
радиуса |
ε с |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
центром в M 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
59
|
|
|
|
|
Тогда |
|
∫∫(rot |
|
|
|
)dS = rot |
|
(M1 ) |
|
(M1 ) πε 2 |
по |
||||||||||
|
|
|
|
|
|
F |
n |
F |
n |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(Sε |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
теореме о среднем ввиду непрерывности |
|||||||||||||||||||||
|
|
|
|
|
подынтегральной функции. Здесь точка M1 |
|||||||||||||||||||||
|
|
|
|
|
близка |
к |
|
M 0 . По теореме Стокса, |
||||||||||||||||||
|
|
|
|
|
∫( |
|
|
|
|
|
)dl = (rotF(M1 ) |
|
(M1 )) πε 2 или |
|
||||||||||||
|
|
|
|
|
F |
l |
n |
|
||||||||||||||||||
|
|
|
|
|
Lε |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
∫( |
|
|
|
)dl |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
F |
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
rot |
|
(M 0 ) |
|
(M 0 )= lim Lε |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
n |
πε 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
ε→0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Ввиду произвольности выбора плоскости, получаем проекцию rotF(M 0 ) на произвольную ось n(M 0 ). Это определяет и сам вектор.
Легко вычислить, что rot gradU = 0 .
Можно доказать и обратное. Если область односвязная и векторное поле
F удовлетворяет условию rotF = 0 , то F - потенциальное, т.е. существует функция U такая, что F = gradU .
Отметим, что выводы о независимости интеграла от формы пути интегрирования, сделанные для двумерного случая, полностью переносятся и
на трехмерный. Полученное там условие |
∂Q |
= |
∂P |
и rot |
|
= 0 вполне |
|
F |
|||||||
∂x |
∂y |
||||||
|
|
|
|
|
|||
аналогичны. |
|
|
|
|
|
|
60