

§5. Уравнение плоскости в пространстве. Расстояние от точки до плоскости.
П лоскость
в пространстве можно задать
лоскость
в пространстве можно задать
а) с помощью точки Mo и ненулевого вектора n;\s\up8(( ; тогда можем написать, что ={M MoM;\s\up10( –(n;\s\up8((}; (*)
б) с помощью точки Mol и двух неколлинеарных векторов a;\s\up8(( и b;\s\up9((, параллельных ;
в) с помощью трех точек Mo, M1, M2 , не лежащих на одной прямой.
Теорема 5. 1. Плоскость , проходящая через точку Mo(xo, yo, zo), перпендикулярно вектору n;\s\up8(((A, B, C), задается в декартовой СК уравнением
A(x – xo) + B(y – yo) + C(z – zo) = 0. (21 )
2. Плоскость , проходящая через точку Ao(xo, yo, zo), параллельно двум неколлинеарным векторам a;\s\up8(( и b;\s\up9(( задается уравнением
=0 (22)
3. Плоскость , отсекающая на координатных осях ненулевые отрезки a, b, c задается уравнением
+ + = 1 (23)
(предполагается, что a, b, c могут быть отрицательными).
Доказательство. 1. Пусть M(x, y, z) – произвольная точка плоскости. Тогда MoM;\s\up10( –( n;\s\up8(( MoM;\s\up10( –( · n;\s\up8(( = 0. Поскольку MoM;\s\up10( –((x–xo, y–yo, z–zo), то последнее равенство в координатах как раз имеет вид (22).
Обратно, если координаты точки M(x, y, z) удовлетворяют (21), то MoM;\s\up10( –(n;\s\up8(( M.
2. Пусть M(x, y, z) – произвольная точка плоскости. Тогда MoM;\s\up10( –( компланарен векторам a;\s\up8(( и b;\s\up9((, а это равносильно тому, что смешанное произведение этих трех векторов равно нулю: MoM;\s\up10( –( a;\s\up8(( b;\s\up9(( = 0. В координатах последнее равенство как раз имеет вид (22).
О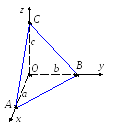 братно,
если координаты точки
M(x,
y,
z)
удовлетворяют (22), то векторы
MoM;\s\up10(
–(,
a;\s\up8((,
b;\s\up9((
компланарны, а значит M.
братно,
если координаты точки
M(x,
y,
z)
удовлетворяют (22), то векторы
MoM;\s\up10(
–(,
a;\s\up8((,
b;\s\up9((
компланарны, а значит M.
3. Условие означает, что плоскость проходит через точки A(a, 0, 0), B(0, b, 0), C(0, 0, c). Векторы AB;\s\up10( –((a, b, 0) и AС;\s\up10( –((a, 0, c) параллельны плоскости. Подставим их координаты в (23):
=0
Самостоятельно раскройте определитель и приведите получившееся уравнение к виду (24).
Э то
уравнение называетсяуравнением
плоскости в отрезках.
то
уравнение называетсяуравнением
плоскости в отрезках.
Следствие. Любая плоскость определяется уравнением вида
Ax + By + Cz + D = 0 , (25)
которое называется общим уравнением плоскости. И обратно, всякое уравнение вида (25) определяет плоскость.
Упражнение. Доказательство этого следствия очень похоже на доказательство следствия 2 из §1. Докажите его самостоятельно.
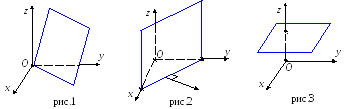
Рассмотрим частные случаи плоскостей, задаваемых уравнениями вида (25).
1. D = 0. Тогда уравнению Ax+By+Cz=0 удовлетворяют координаты точки O(0, 0, 0). Плоскость проходит через начало координат (рис.1).
2. C = 0. Имеем уравнение Ax + By +D = 0. Тогда вектор нормали к плоскости – n;\s\up8(( (A, B, 0) и n;\s\up8(( Oz, а значит, Oz (рис.2).
Аналогично, при B=0 получим Oy, а при A = 0 – Ox.
3. A = B = 0. Имеем уравнение Cz+D=0, которое равносильно z = – C /D. Тогда Oz (рис.3).
Аналогично, при A = C = 0 будет Oy, а при B = C = 0 – Ox.
Теорема 6. Пусть плоскость задаётся общим уравнением (25). Тогда расстояние от точки M(x1, y1, z1) до плоскости вычисляется по формуле
h = . (26)
Эта теорема доказывается точно так же, как и теорема 4. Знак выражения зависит от того, в каком полупространстве относительно плоскости находится точка M.