

Классификация систем электропривода
Система – совокупность отдельных элементов, объединенная выполнением общей задачи. Эл.привод – система, состоящая из эл/мех. преобразовательного передаточного и управ- ляющего устройств, обеспечивающего преобразование э/э в механическую с требуемыми показателями.
Классификация по особенностям внешних и внутренних элементов и по организации взаимосвязи внутри системы
Внешний элемент
Источник питания: 1 постоянного тока; переменного тока. 2 автономный источник; сеть.
3 по мощности; по напряжению; по частоте
Управление
1 автоматическое (без участия человека – лифт, станок); ручное управление (все переклю-
чения осуществляет оператор – кран, электровоз); автоматизированное (основные решения
принимает оператор, система частично облегчает работу – автоматическая стабилизация
тока в трамвае). 2 по виду информации – непрерывная (аналоговая); релейная (логическая);
цифровая.
Исполнительный элемент
По назначению привода и главным стабилизируемым параметрам:
приводы стабилизации усилия или момента на валу (тяговые, моталки, гл. приводы стан-
ков); - стабилизация скорости (краны, насосы, вентиляторы); - стабилизация положения: по-
зиционные (перемещение из одной известной точки в другую за минимальное время –
лифт); следящие (закон изменения входного сигнала заранее не известен – станки с ЧПУ,
прицел).
Классификация общепромышленных механизмов и типовых приводов, учитывает ус-
ловия эксплуатации, режимы работы
1Насосы, вентиляторы, компрессоры; 2 Подъемнотранспортные механизмы – краны, лиф- ты, подъемники; 3 Экскаваторы (жесткий режим работы); 4 Станки; 5 Металлургическое оборудование – прокатные станы, рольганги.
Классификация по построению системы:
разомкнутые (стабилизируют характеристики в пределах естественной)
замкнутые (только наличие ОС).
По общим признакам привода:
1 по климатическому исполнению; 2 обслуживаемые и не обслуживаемые
По элементной базе системы управления:
релейно-контакторные системы; - электромашинные;
полупроводниковые (преобразователь + устройство управления) Замкнутые системы по уровню сложности и элементной базе делятся на:
аналоговые; - релейные; - цифровые
Аналоговые и цифровые системы могут выполняться адаптивными, когда параметры на-
стройки и структура системы изменяются в зависимости от условий и режимов работы.
По типу преобразователя:
выпрямитель; - инвертор; - преобразователь частоты; - преобразователь напряжения
Поэлементнойбазепреобразователя: релейно-контакторные схемы, электромашинные, по-
лупроводниковые.
Электромеханические преобразователи:
тяговые реле; - электромагниты; - электромагнитные муфты и тормоза; - эл. двигатель
Тормоза бывают позитивными и негативными (расторможены при подаче питания)
1
Эл
.
дви
гате
л
и
:
постоянного
и
переменного
тока
Попринципудействия:
синхронные и асинхронные, шаговые
Ас ин хр онн ые дв ига те л и
В роторе наводится ЭДС, пропорциональная скольжению; под действием ЭДС появляется ток и вращающий момент. На пуске АД из-за преобладания индуктивного сопротивления развивает очень маленький момент, ток смещается относительно напряжения и потока на 90°, что равноценно смещению щеток в ДПТ. Частотное управление АД: скалярное и векторное
При скалярном управлении формируется напряжение и частота на статоре. Двигатель рабо- тает в пределах естественной характеристики.
При векторном управлении – устанавливается датчик скорости и датчик положения ротора. Напряжение на обмотке статора формируется в зависимости от положения вектора поля ро- тора, обеспечивается 90° сдвиг.
Син хр онн ые дв иг ате л и
Преимущества: стабильная частота вращения, возможность работы с опережающим cosθ высокие массоэнергетические и динамические показатели, простая технология изготовле- ния.
По виду возбуждения:
двигатели с постоянными магнитами; - с электромагнитным возбуждением; - реактивные
(индукторные).
У индукторных машин явнополюсный ротор, это самые дешевые машины, недостаток –
большая инерционность ротора, требуется очень маленький зазор при высоких энергетиче-
ских показателях.
По способу управления машинами:
Классический синхронный двигатель – синусоидальное питание от сети, разомкнутая
схема, в ответственных механизмах добавляются система регулирования возбуждением,
компенсатор (регулирует cosθ и повышает момент при перегрузках), система пуска двига-
теля.
Вентильные двигатели – в состав входит дополнительно инвертор напряжения и датчик
положения ротора. Питание обмоток формируется в зависимости от положения ротора. Ре-
гулировочные и механические характеристики соответствуют ДПТ сНВ.
Шаговые двигатели – на обмотку статора подается импульсное питание. При переключе-
нии обмоток ротор поворачивается. Система разомкнута. Возможен пропуск шагов.
ДПТ
По способу возбуждения:
от постоянных магнитов;
электромагнитное (независимое, последовательное, смешанное)
По способу регулирования:
Релейно-контакторное с включением добавочного резистора последовательно или парал-
лельно.
Регулирование напряжения
– плавно (тиристорные преобразователи),
дискретно (переключение обмоток),
ШИМ-регулирование (среднее значение соответствует коэффициенту заполнения)
резистором
Поконструктивномуисполнению: вращающиеся, линейные, обращенная конструкция
2
Постепенизащиты:
умеренное,
тропическое,
морское,
брызгозащищенное,
влагозащищен-
ное,
закрытое,
взрывозащищенное.
Поспособуохлаждения: не вентилируемые, самовентилируемые, с принудительной венти- ляцией.
Переда т оч н ое ус тр ойс тв о
Редукторный привод
Безредукторный привод
Редукторный привод
Преимущества: снижение массы за счет уменьшения габаритов двигателя, но при установке
передачи момент двигателя снижается.
Передача позволяет согласовать частоту вращения двигателя со скоростью перемещения
исполнительного элемента.
Недостатки: снижение КПД, нестабильность передаточного отношения при больших пере-
даточных отношениях, ударные нагрузки при появлении люфта, малая жесткость, т.е. на-
рушение соответствия между углом поворота Д. и исполнительным механизмом.
Безредукторный привод
Используется в механизмах повышенной точности или механизмах со сверхбольшими мо-
ментами.
По видам передач ПУ:
ременная, зубчатая, фрикционная
Зубчатые передачи бывают цилиндрические, конические, планетарные, волновые, червяч-
ные, винтовые.
3
Основные этапы разработки новых устройств, виды оптимизации, ограничения в системах ЭП

Стад и и раз раб отк и п о Е СКД :
Техническое задание (ТЗ)
Наименование и шифр разработки
Цель выполнения работы
Основные технические характеристики. Указываются те характеристики, которые в
дальнейшем подтверждаются результатами испытаний.
Состав и структура изделия. Принцип действия. Требования к составным частям.
Требования по помехозащищенности (электромагнитной совместимости), помехи по це-
пям питания, радиопомехи.
Требования по условиям эксплуатации
Транспортировка и хранение, упаковка и маркировка.
Утилизация
Календарный план. Сроки выполнения этапов.
Финансирование
Научно-исследовательская работа
Патентный поиск. Анализ технических решений, применяемых в данных и смежных об-
ластях.
Расчет технических показателей, расчет элементов системы.
Разработка эскизной документации (достаточная для изготовления макетного образца)
Изготовление макетного образца, т.е. действующего образца, в котором не реализованы
некоторые требования по технологичности, внешнему виду, компановки.
Испытание макетного образца. Цель: проверка соответствия технических характеристик
заданным. По результатам испытаний принимаются решения по уточнению тех. задания, по доработке макета или о постановке на серийное производство.
Рабочий проект (опытно-конструкторская работа)
Цель: подготовка серийного производства, сокращение времени на изготовление и отладку,
контроль качества выпускаемой продукции.
Выпуск документации на изготовление в полном объеме.
Ведомости покупных и комплектующих изделий с перечнем замен.
Чертежи сборочных единиц, узлов и деталей.
Монтажные схемы или таблицы соединений.
Методики монтажа, проверки. регулировки.
Технические условия (входной и выходной контроль параметров комплектующих и элемен-
тов систем, допуск на контролируемые величины).
Методики проверки, приборов и аппаратура, применяемые для контроля. Разрабатывается испытательная аппаратура.
В ид ы оп тим и за ци и
Любая инженерная задача формулируется как оптимизационная. По уровню различают:
Параметрическая оптимизация – в рамках заданной структуры и законов управления вы- бираются регулировочные параметры.
Структурная оптимизация – в рамках заданных законов регулирования и управления из- меняется структура или принцип действия отдельных блоков, затем выбираются параметры (переход с аналогового на цифровое управление; замена релейно-контакторной схемы кон- троллером).
Функциональная оптимизация – выбираются законы управления, структура и параметры.
4
Математическое
описание:
1
Целевая
функция
Цель (min, max, const) [F(x) min] 2 Ограничения
P(x)<Pзаданной (стоимость, габариты, энергопотребление) 3 Область вариации параметров
Хmin<Xi<Xmax
Область вариации параметров определяется изменяемыми параметрами: эксплуатационны-
ми характеристиками, диапазонами рабочих скоростей, нагрузок, вариантов схем, номина-
лами элементов.
В качестве целевой функции и ограничений выступают технические и технико-
экономические показатели системы (точность, диапазон регулирования, мощность, стои-
мость, срок службы) и их сочетание.
По системе экспертных оценок целевая функция формулируется в следующем виде:
F(x) = k1C + k2T + k3N, где С, Т, N – весовые коэффициенты, которые определяются по
средним значениям оценок экспертов.
Осн овн ые огра н ич е н ия в с ис те м а х Э П
Ограничения влияют на область вариации параметров системы.
Ограничение по напряжению
Пробой изоляции, в эл. машинах межламельный промежуток коллектора.
Оговаривается напряжение пробоя изоляции (двигатель на 380 В – Uпр = 3 кВ) и номиналь- ное напряжение. Повышение напряжения выше номинального приводит к квадратичному
снижению срока эксплуатации. На прочность изоляции дополнительно влияет темп нарас- тания напряжения и изменения тока (вихревые токи, паразитные индуктивность и емкость). Защита от перенапряжения – разрядники. Защита от Iкз – 10-12 кратная уставка. Тепловая защита – 1,1 кратная уставка от номинального. Защита от Iкз – быстродействующий предо- хранитель или автоматический выключатель.
Ограничение по току.
Предельно допустимый ток определяется максимально рассеиваемой мощностью наиболее
слабого элемента, разрушение материала проводника или контакта. Например, при превы-
шении тока у ДПТ взрываются щетки.
Ограничение по нагреву.
Рассеиваемая мощность на участке цепи. Защита – биметаллические контакты.
Ограничение по моменту или передаваемому усилию.
Ломается механическая часть (шпонки, зубчатые передачи, шпильки, муфты, валы). Пре-
дельные значения определяются механической прочностью наиболее слабого элемента пе-
редачи. Шпонки, ременная передача, фрикционная передача – защита механической части.
При расчетах учитывается статическая и динамическая составляющие. Динамическая стой-
кость ≈ на 30-50% < статической (ударные нагрузки).
Ограничение по скорости или частоте вращения.
Нагрев подшипников, динамические нагрузки из-за дисбаланса и центробежных усилий.
Ограничение по мощности.
Для автономных систем мощность источника питания. Обычно оговаривается импульсная
мощность (пиковый режим) и длительная мощность (номинальный режим).
Ограничение по ускорению и рывку.
Рывок – темп набора ускорения (вторая производная от скорости). Связано с динамически-
ми нагрузками на элементы привода. В большинстве механизмов ускорение ограничивается на уровне 3 м/с2. Для большинства переменных оговариваются не только максимальные значения, но и темпы их изменения. Например, скорость нарастания тока или напряжения.
5
Статические и динамические показатели систем ЭП
При решении задач оптимального проектирования рассчитываются зависимости ограниче- ний от каждого из варьируемых параметров и определяется область возможной реализации. При линейной зависимости оптимальное решение всегда находится на одной из вершин, т.е. в точке, соответствующей совпадению ограничений. Вывод: проектирование нужно прово- дить по предельным условиям эксплуатации, а не по номинальной точке.
Технические ограничения можно разделить на два класса:
статические.
динамические.
Статическиепоказатели удобно представлять в виде желаемой механической и электроме-
ханической характеристики ЭП.
Реверс.
Наличие торможения вперед и назад.
Диапазон регулирования:
- скорости
ω = ω , Dω = ω
Dω↑
=


max 2 4
↓
ωmin ω1 ω3
- диапазон изменения момента:
D M
max
M
2
M M min M
1
Статическая точность поддержания скоро- сти или момента.
∆ωС1 =
ω2 ω7 Μ2
Μ1 100 %
ω7 Μ2

Относительное отклонение скорости оговаривается по отношению к каждому из воз- можных возмущений (нагрузка, напряжение питания, температура), дополнительно приво- дится суммарная погрешность.
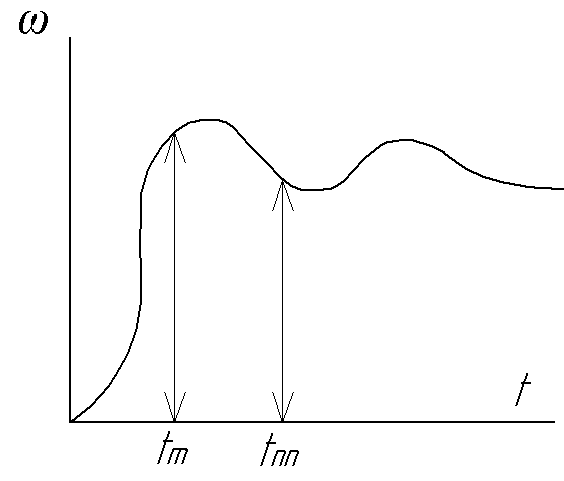
Динамические показатели
Описывают качество переходных процессов в системе.
Рассчитываются и оцениваются при ступенчатом входном воздействии.
1 Максимальное отклонение или динамическая ошибка регулирования – определяется в от-
носительных единицах. За базу принимается минимальное или номинальное значение.
Установившееся отклонение ωу (установив- шаяся ошибка).
Перерегулирование
ζ
=
ωmax
ωy
100 %
ωy
Время достижения максимума tm. 5 Время переходного процесса tпп.
Временные параметры определяются по входу сигнала в 5% коридор относительно устано- вившегося или псевдоустановившегося значе-
ния (вынужденная составляющая переходного процесса).
6
При сложном переходном процессе выделяется свободная составляющая sin с затуханием по экспоненте и вынужденная.
Временные показатели определяются по 5% коридору относительно максимального значе- ния вынужденной составляющей.
Частота колебаний соответствует частоте среза контура регулирования.
3,14
tm
=
ωс
, ωс – частота среза, когда контурный коэффициент передачи равен 1.
tпп =
m tm
6
Число
колебаний
m
m
=
tпп
t m
Число колебаний определяется числом полупериодов. В замкнутых системах регулирования число колебаний и перерегулирование зависят от запаса устойчивости по фазе.
7
Разработка структурных схем с использованием графов
Граф – графическое представление взаимосвязей переменной в системе.
В вершинах (или узлах) изображаются переменные. Стрелками показывается направление
взаимодействия. Над стрелками располагаются постоянные величины, влияющие на взаи-
мосвязь.
Построение графа – разработка системы обозначений и допущений, принятых в расчете.
Пример: ДПТ НВ
кФ = const ОВ:
Построенный граф позволяет выделить парные взаи-
мосвязи переменных, определить общую структуру сис-
темы, исключить промежуточные переменные.
U
IB =
B
R
B
LB
p
Na – число активных проводников а – число ветвей
Для упрощения рассмотрим режим работы с посто- ян- ным потоком.
UB, IB, kФ – не изменяются.
Тогда получим:
По упрощенному графу составляется структурная схема – определяются передаточные функции между парными взаимодействиями и уравнения для узлов.
Uя – Ед = ∆ Uя в двигательном режиме М – Мст = Мдин
М = кФ
ΔUя
R
я
Lя
р
d = р - операторная форма записи
dt
ω
=
M
дин
У р
Ед = кФω
На структурной схеме переменные
обозначаются стрелками, взаимосвязи – прямоугольниками.
к
Wяц
= я
, Тя =
L
я
, кя
=
кФ / R я
;
Wяц

кф / R я
Тя
р
1 R
я
1 Тя р
Lя / R я р 1
8
Анализ динамики систем с использованием метода ЛАЧХ
Метод справедлив для линейных систем. В основе метода преобразования Фурье и Лапласа. Преобразование Фурье: Ступенчатая функция может быть представлена в виде бесконечно- го ряда синусоид, причем для каждого момента времени существует единственная состав- ляющая, определяющая выходной сигнал, а сумма остальных составляющих равна 0. Коэффициент усиления звена
к
=
ΔUвых
ΔUвх
= Авых
Авх
Любой элемент может быть описан передаточными функциями, зависимостью коэффици- ента передачи от частоты в операторной форме. При экспериментальном определении час- тотных характеристик на вход элемента подается синусоидальный сигнал, изменяя частоту определяется коэффициент передачи и фазовый сдвиг в зависимости от частоты (АЧХ и ФЧХ).
Для линейных минимально-фазовых звеньев АЧХ и ФЧХ однозначно связаны – единичный наклон 90°.
В нелинейных системах амплитуда и фаза определяются по первой гармонике сигнала.
Частотные характеристики строятся обычно в логарифмическом масштабе, что позволяет
снизить ранг математических операций. Например, заменить операцию умножения сложе-
нием.
При реакции на ступенчатый сигнал коэффициент передачи определяет амплитуду выход-
ного сигнала, а частота – время.
tm =
3,14
ω2
, tпп =
3,14
ω1
Um = kmUвх
W = 1
Тр 1
р = jω
1
=
j 0,1 1
1 =
j 1
1
2
9
Построение частотных характеристик:
В передаточную функцию вместо р подставляют jω, сравниваются вещественные и мнимые
части для разных значений частот. Меньшая часть при построении аппроксимированных
характеристик отбрасывается. Определяются коэффициенты передачи во всем диапазоне
частот.
В
точках
излома
погрешность
аппроксимированной
характеристики


изменение наклона.
Для последовательно включенных звеньев погрешности перемножаются
N = NB – NН
2 N, где N –
Типовые звенья. Построение частотных характеристик, расчет показателей пе- реходных процессов. Влияние на точность расчетов аппроксимации характеристик и запаса устойчивости.
Т ип о вые зве нь я
Пропорциональное звено
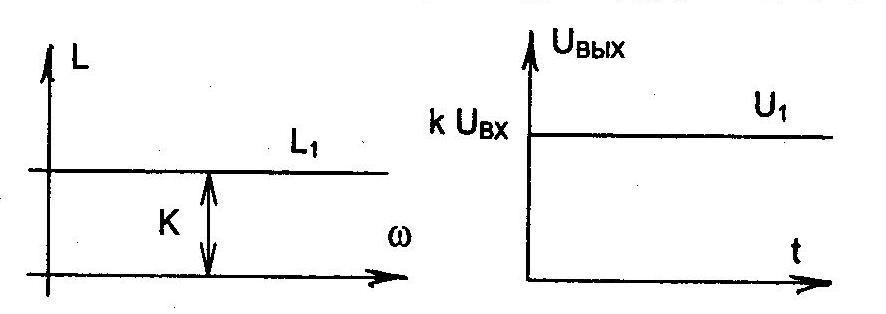
ЛАЧХ Переходная функция
Во входной цепи и в канале обратной связи усилителя включены резисторы R1 и R2.
R
WP
= 2
R1
= k, WP – передаточная функция.
Интегрирующее звено
1
WР
Тр
ЛАЧХ Переходная функция
Пропорционально-интегральное звено
WПИ =
Т1р
1
=
Т2 р
КП
1
ТИ
р
ЛАЧХ ПИ-регулятора Переходная функция ПИ-регулятора
Дифференцирующее звено


L
+1
Uвых
1/Тд


t
Тд
WP Tp
Апериодическое звено
WA
k
Tp
1
t
T
– соответствует переходному процессу в виде экспоненты:
Uвых
k


k * e
L
k/T
-1
6 Реально-дифференцирующее звено
WP
T1p
T2p
1
(T1p)
1