

1 Способы представления систем управления
Для исследования любой системы управления используется ее модель.
Модель — это объект или явление, в достаточной степени повторяющие свойства моделируемого объекта или явления (прототипа), существенные для целей конкретного моделирования, и опускающие несущественные свойства, в которых они могут отличаться от прототипа.
Виды моделей:
на естественном языке
на специальном языке
научные
математические формулы
алгоритмы
технические
техкарты
программы
Смешанные
таблицы
графы
деревья
сети
блок - схемы
схемы
карты
Наглядные (выраженные на языке представления)
рисунки
чертежи
графики
фотографии
В теории управления для исследования систем используются математические и смешанные (графические) способы описания систем.
1.1 Математические способы описания систем: дифференциальные уравнения, передаточные функции, пространство состояния. Переход от одной формы к другой.
В теории управления широко применяется несколько математических способов описания системы управления, а точнее ее математической модели. Одномерные одноканальные системы (или объекты) обычно описывают дифференциальным уравнением, связывающим входной и выходной сигнал системы:
![]() , (1.1)
, (1.1)
здесь
![]() и
и![]() - входной и выходной сигналы системы,
- входной и выходной сигналы системы,
![]() - производная сигнала
- производная сигнала![]() n-го порядка;
n-го порядка;
![]() - производная сигнала
- производная сигнала![]() m-го порядка;
m-го порядка;
![]() - коэффициенты при выходном сигнале и
его производных;
- коэффициенты при выходном сигнале и
его производных;
![]() - коэффициенты при входном сигнале и
его производных.
- коэффициенты при входном сигнале и
его производных.
При составлении дифференциального
уравнения системы следует учитывать
следующие замечания: выходной сигнал
и его производные записываются в левой
части уравнения, а входной сигнал и его
производные – в правой;
условие
![]() является условием физической реализуемости
системы.
является условием физической реализуемости
системы.
В случае многоканальной системы используют систему дифференциальных уравнений, записанную в виде нормальной формы Коши, т.е.
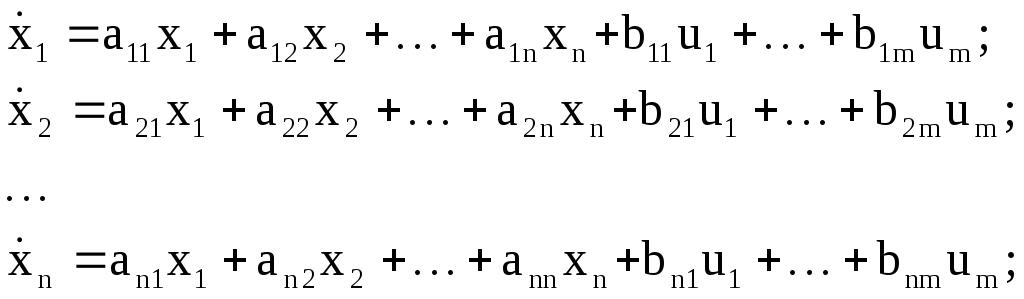 (1.2)
(1.2)
здесь
![]() - выходные сигналы системы,
- выходные сигналы системы,
![]() - входные сигналы системы.
- входные сигналы системы.
Такую систему дифференциальных уравнений относительно первых производных часто записывают в матричной форме:
![]() (1.3)
(1.3)
здесь
![]() - вектор переменных состояния;
- вектор переменных состояния;
![]() - вектор входных переменных;
- вектор входных переменных;
![]() - вектор выходных переменных;
- вектор выходных переменных;
A- матрица коэффициентов системы;
B- матрица входных коэффициентов (матрица управления);
C- матрица выходных коэффициентов;
D- матрица коэффициентов пропорциональных каналов (матрица компенсации).
При этом размерность матриц будет определяться размерностью исходного дифференциального уравнения. Способ описания системы управления с помощью дифференциальных уравнений в матричной форме называется методом пространства состояний.
Если при составлении дифференциального
уравнения процедуру вместо знака
дифференцирования (например
![]() )
использовать оператор дифференцирования,
то полученное уравнение будет называться
дифференциальным уравнением в операторном
виде. Так, для уравнения (1.1) запишем:
)
использовать оператор дифференцирования,
то полученное уравнение будет называться
дифференциальным уравнением в операторном
виде. Так, для уравнения (1.1) запишем:
![]() , (1.4)
, (1.4)
здесь
![]() - оператор дифференцирования, т.е.
- оператор дифференцирования, т.е.![]() .
.
В общем виде дифференциальное уравнение в операторном виде можно записать:
![]() , (1.5)
, (1.5)
тогда уравнение относительно выходного сигнала будет иметь вид:
![]() . (1.6)
. (1.6)
Следующим способом описания системы управления является передаточная функция. Передаточная функция, связывающая входной и выходной сигналы времени, называется операторной передаточной функцией, и, соответственно (1.6), записывается как:
 (1.7)
(1.7)
Если от дифференциальных уравнений
перейти к уравнениям в изображениях
Лапласа, т.е оператор дифференцирования
![]() заменить на оператор Лапласа
заменить на оператор Лапласа![]() ,
тогда вместо операторной передаточной
функции следует говорить о передаточной
функции в изображениях Лапласа:
,
тогда вместо операторной передаточной
функции следует говорить о передаточной
функции в изображениях Лапласа:
![]() , (1.8)
, (1.8)
здесь
![]() и
и![]() изображения Лапласа сигналов
изображения Лапласа сигналов![]() и
и![]() ,s
– переменная преобразования Лапласа.
,s
– переменная преобразования Лапласа.
Таким образом, в теории управления для описания математической модели системы используются следующие формы:
дифференциальное уравнение,
дифференциальное уравнение в операторном виде,
операторная передаточная функция,
передаточная функция в изображениях Лапласа,
пространство состояний.