

1.2 Графические способы описания систем: структурные схемы, графы, статические характеристики. Переход от одной формы к другой.
В теории управления широко применяется несколько графических способов описания системы управления: структурная схема, граф системы, статическая характеристика.
Структурной схемойсистемы управления называют графическое представление ее математической модели в виде соединений звеньев с указанием входных и выходных сигналов. Основными элементами структурной схемы являются: звено, узел, сумматор и элемент сравнения.
|
а |
б |
в |
г | ||
|
|
|
|
| ||
|
д |
е |
ж | |||
|
|
|
| |||







Рисунок – Элементы структурных схем
Графомназывается совокупность множества V точек, называемых вершинами, и множества R простых (т.е. самонепересекающихся) кривых, называемых ребрами.
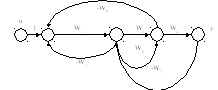
Рисунок – Граф системы управления
Статическая характеристиказвена системы управления – зависимость выходного сигнала звена от входного сигнала в статическом режиме, представленная в графической форме.
Режим работы САУ, в котором управляемая величина и все промежуточные величины не изменяются во времени, называется установившимся, или статическим режимом.
Рисунок – Виды статических характеристик звеньев
1.3 Переход от одной математической формы описания к другой
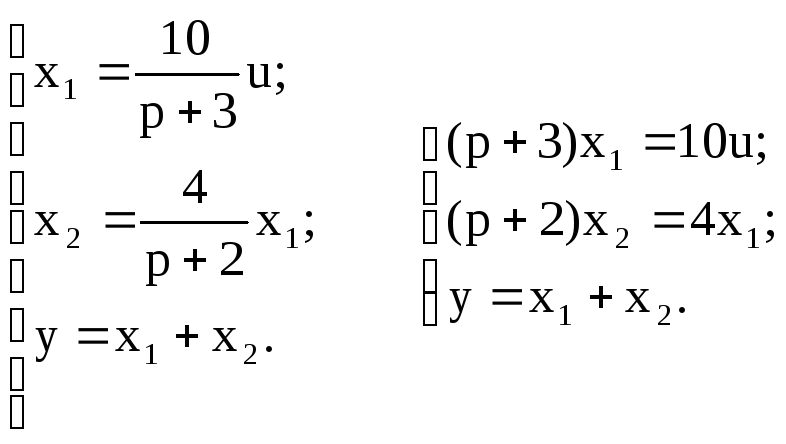
Рассмотрим пример перехода от одной формы представления к другой.
Дифференциальное уравнение объекта имеет вид:
![]() .
.
Необходимо описать рассматриваемый объект с помощью известных форм.
Запишем дифференциальное уравнение объекта в следующем виде:
![]() .
.
Тогда, используя оператор дифференцирования
![]() ,
запишем уравнение объекта в операторном
виде:
,
запишем уравнение объекта в операторном
виде:
![]() .
.
По формуле (1.7) передаточная функция в операторном виде для заданного объекта:
![]() .
.
Заменив оператор дифференцирования
![]() на оператор Лапласа
на оператор Лапласа![]() запишем передаточную функцию объекта
в изображения Лапласа:
запишем передаточную функцию объекта
в изображения Лапласа:
![]() .
.
Задание №1.1
для объекта, заданного одной из форм описания линейной динамической системы, привести другие формы описания (за исключением формы пространства состояний).
|
№ |
математическое описание объекта |
№ |
математическое описание объекта |
|
1 |
|
2 |
|
|
3 |
|
4 |
|
|
5 |
|
6 |
|
|
7 |
|
8 |
|
|
9 |
|
10 |
|
|
11 |
|
12 |
|
В теории управления пространство состояний - один из основных методов описания поведения динамической системы.
Иногда возникает необходимость прямого и обратного перехода от записи системы в виде передаточной функции к форме описания с помощью пространства состояний. Прямой переход в такой задаче неоднозначен, т.е. существует бесконечное множество троек матриц, в то время как обратный переход однозначен. Существует три стандартных схемы перехода от передаточной функции к пространству состояний: последовательная схема, параллельная и нормальная.
Рассмотрим методику перехода по каждой схеме.
Последовательная схема
Задано дифференциальное уравнение, описывающее состояние системы:
![]() .
.
Тогда передаточная функция для такой системы будет иметь вид:
![]() .
.
Приведем передаточную функцию системы к виду последовательно соединенных звеньев первого порядка, т.е.
![]() .
.
Структурная схема для такого вида передаточной функции имеет вид:

Составим систему уравнений по приведенной структурной схеме относительно выходных сигналов звеньев системы:
Учитывая, что p– это
оператор дифференцирования, т.е.![]() ,
запишем
,
запишем
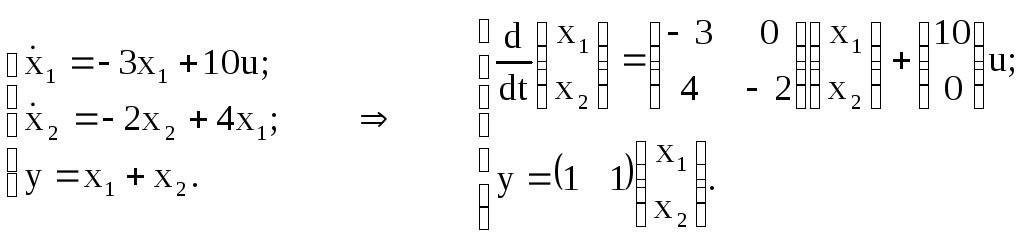
Тогда, принимая во внимание, что типовая форма записи метода пространства состояний имеет вид:
![]()
запишем матрицы A,BиC:
![]()
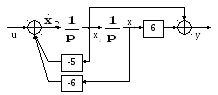
На основании полученных уравнений получим структурную схему для физической системы.
Структурная схема физической системы это структурная схема специфической конфигурации, состоящая из интеграторов, коэффициентов усиления и сумматоров. Данная структурная схема представляет собой заготовку для исследования системы с использованием компьютера.
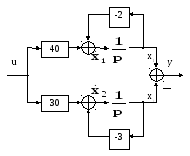
Параллельная схема
Передаточная функция системы имеет вид:
![]() .
.
Приведем передаточную функцию системы к виду параллельно соединенных звеньев первого порядка, т.е.:
![]()

Тогда запишем следующее:
![]()
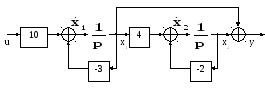
Структурная схема для такого вида передаточной функции имеет вид:
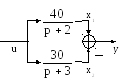
Составим систему уравнений по приведенной структурной схеме относительно выходных сигналов звеньев системы:
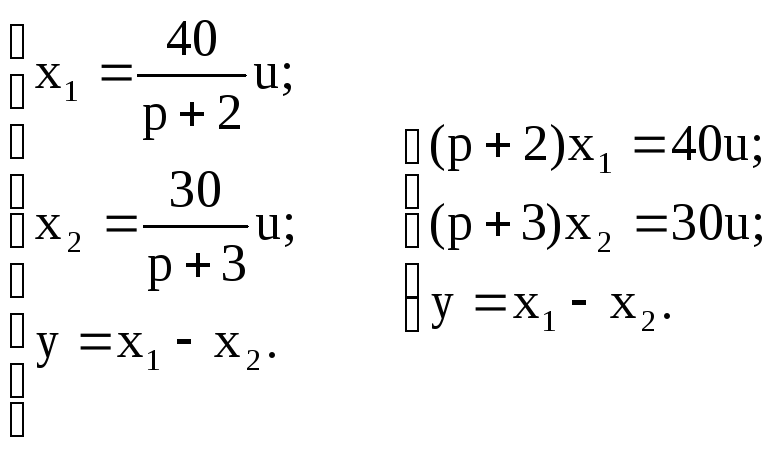
Учитывая, что p– это
оператор дифференцирования, т.е.![]() ,
запишем:
,
запишем:
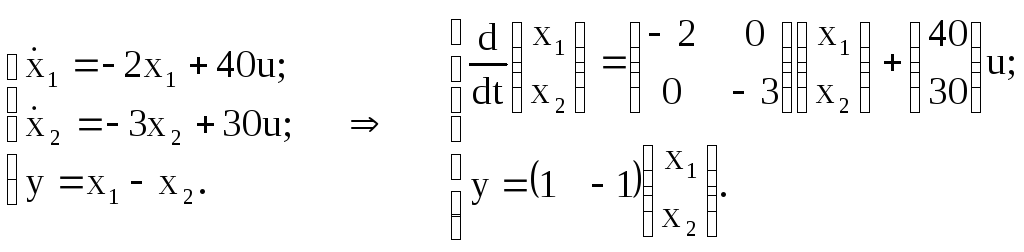
Запишем матрицы A,BиC:
![]()
На основании полученных уравнений получим структурную схему для физической системы.
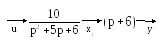
Нормальная схема
Передаточная функция системы имеет вид:
![]()
Структурная схема для такого вида передаточной функции имеет вид:
Составим систему уравнений по приведенной структурной схеме относительно выходных сигналов звеньев системы:

Учитывая, что p– это
оператор дифференцирования, т.е.![]() ,
запишем:
,
запишем:

Учитывая то, что при использовании
метода пространства состояний матричная
форма записи системы дифференциальных
уравнений составляется относительно
ДУ первого порядка, понизим уравнение
второго порядка относительно сигнала
![]() ,
введя промежуточный сигнал
,
введя промежуточный сигнал![]() так, что
так, что
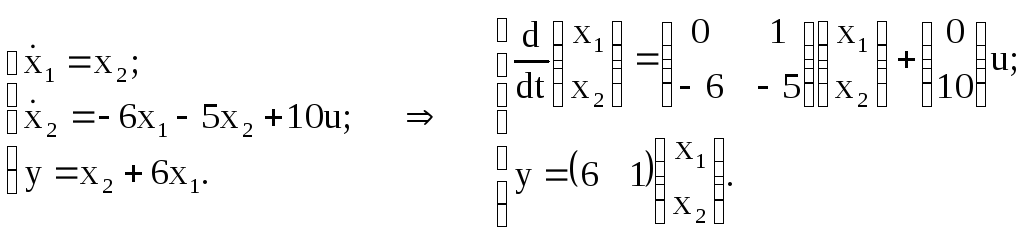
Запишем матрицы A,BиC:
![]()
На основании полученных уравнений получим структурную схему для физической системы.
Таким образом, используя три основных схемы перехода можно перейти от формы представления системы в виде передаточной функции к форме пространства состояний.
Как уже было отмечено, существует и обратный путь перехода, т.е. от формы описания с помощью пространства состояния к операторной передаточной функции.

здесь
![]() - единичная матрица.
- единичная матрица.
Тогда относительно выходного сигнала можно записать:
![]() ,
,
а выражение для передаточной функции имеет вид:
![]() ,
,
здесь
![]() - обратная матрица для матрицы
- обратная матрица для матрицы![]() *.
*.
Таким образом, зная матрицы A,BиC, можно найти выражение для операторной передаточной функции.