Введение: основные понятия теории управления
-
Операторный метод анализа линейных систем. Введение. Основные понятия теории управления.
Основной задачей теории управления является разработка общих принципов создания устройств, управляющих работой различного рода объектов автоматически.
Объекты встречаются следующей природы: механические, электромеханические или электронные, теплотехнические.
Например, решаются такие задачи:
-
Управление движением механических объектов.
Цель управления: задание желаемых значений координат и скоростей; тогда координаты и скорости называются управляемыми параметрами, а управляющие воздействия – внешне силы. В качестве управляющего воздействия рассматривается силовая или кинематическая нагрузка.
-
Управление электромеханическими или электронными объектами. Управляемые: изменения направлений, токов, мощностей, а управляющие воздействия: токи от внешних источников. Сопротивления, емкости, индуктивности элементов с изменяемыми характеристиками.
Цель управления: например a) обеспечение постоянства напряжения между различными узлами или b) достижение максимальной мощности системы.
-
Управление теплотехническими объектами.
Цель
управления:
поддерживать некоторое распределение
T
или не допускать превышения некоторого
придела
 .
Тогда: Управляемые
параметры: процессы изменения T
в различных точках, управляющие
воздействия – варианты подвода тепловой
энергии.
.
Тогда: Управляемые
параметры: процессы изменения T
в различных точках, управляющие
воздействия – варианты подвода тепловой
энергии.
Общий принцип создания систем АУ (САУ).
Не
смотря на различия типов объектов можно
все существующие системы управления
изобразить в виде схемы: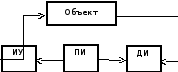
-
Блок датчиков информации (ДИ) – получает информацию о ткущих значениях управляемых процессов.
-
Блок ДИ передает собранную информацию в блок преобразования информации ПИ, в котором вырабатываются сигналы управления. Они показывают, каким должно быть управляющее устройство. (Используется компьютер, вычислительное устройство)
-
Чтобы выразить это воздействие, превратив сигнал в механическое усилие или поток энергии необходимо исполнительное устройство (ИУ).
Исполняющее устройство играет 2 функции:
-
Преобразователь информации;
-
Усилитель мощности.
Рассмотрим пример системы автоматизированного управления (САУ).
Пусть объектом является вращающейся вал, нагруженный внешним моментом m.
Пусть цель управления – задать этому валу такой же угол поворота, который имеет задающая ось.
Примечание: простое механическое решение не подходит в силу инерционных свойств.
Изобразим схему:
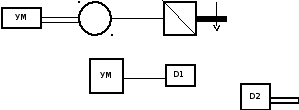
m
Рассмотрим принцип управления в этом случае: датчики D₁и D₂ отмечают углы поворота ϕ₁ и ϕ₂.
Пусть ϕ₁≠ϕ₂, тогда вырабатывающееся напряжение соответствует углам поворота, и через усилитель мощности попадает на электродвигатель. Тогда этот электродвигатель формирует нужное движение для того, чтоб приравнять ϕ₁ к ϕ₂.
Этот тип управления называется управлением с обратной связью по ошибке.
-
Операторный метод анализа линейных систем.
-
Описание элементов системы.
-
-
Уравнения элементов.
Объекты управления состоят из элементов, которые описываются в соответствии со следующими двумя концепциями:
-
Каждый элемент системы рассматривается как звено, в котором преобразовывается входное воздействие v(t) в входную реакцию y(t). (преобразование вход-выход).
v(t)– вход;
y (t) – выход.
-
Так как звеньев в объекте много, то кроме описания объектов вводится описание связей между их выходами и входами. Эти описания зависят от типа соединения звеньев (последовательное, параллельное).
В этой главе рассматриваются линейные системы и тогда в качестве описания преобразования вход\выход используются обычные ЛДУ с постоянными коэффициентами.
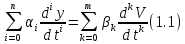
Где
 и
и
 - параметры звена.
- параметры звена.
Число
 - называется параметром звена.
- называется параметром звена.
Введем
оператор дифференцирования
 .
.
 ,
тогда
,
тогда
-
Рассмотрим пример из ТМ:
m
y


с b
Если некоторая сила F приложена к m, то:

Если
изменить концепцию входного воздействия
: вместо силового рассмотрим случай, когда основание
начинает двигаться с перемещением v(t).
Известно, что такое перемещение на
инерционный член не влияет.
рассмотрим случай, когда основание
начинает двигаться с перемещением v(t).
Известно, что такое перемещение на
инерционный член не влияет.