

Промышленные роботы
Общие понятия и определения
В качестве эффективных средств автоматизации и механизации различных видов производства широкое распространение получили промышленные роботы (ПР). Они предназначены для различных манипуляций при выполнении основных и вспомогательных производственных и транспортных операций без непосредственного участия человека. Промышленные роботы характеризуются возможностью и быстротой перехода на выполнение новых операций при перепрограммировании управляющего устройства и перестройке манипуляционной части.
Отличительный признак ПР (Рис. 8.8) — наличие манипулятора 1. В сочетании с автоматическим устройством управления 2 манипулятор становится промышленным роботом. В общем случае ПР состоит из трех систем: манипуляционной — для целенаправленного воздействия на окружающую среду, информационной – для определения состояния манипуляционной системы робота и оценки результатов воздействия на окружающую среду и управляющей – для выработки алгоритма оптимального взаимодействия с окружающей средой.
Промышленный робот представляет сочетание разнообразных устройств механических звеньев, управляемых приводов различных типов, измерительных датчиков обратной связи и очувствления, управляющих ЭВМ, встроенных микропроцессорных и логических устройств, работающих взаимосвязанно как единая динамическая и информационно-управляющая система. Поэтому из-за многообразия факторов, явлений и процессов, лежащих в основе строения и функционирования ПР, их классификация характеризуется большим числом параметров и критериев качества. Они объединены в основные группы характеристик: структурные, кинематические, силовые, динамические, эксплуатационные, управления, информационной емкости и типа исполнения.

Рис. 8. 8. Промышленный робот ТУР-10
По назначению ПР делятся на универсальные, специализированные и специальные. По грузоподъемности различают роботы: сверхлегкие (до I кг), легкие (1..10 кг), средние (10...200 кг), тяжелые (200... 1000 кг), сверхтяжелые (более 1000 кг). По типу силового привода звеньев манипулятора различают роботы с гидравлическим, пневматическим, электрическим и комбинированным приводом. Промышленные роботы по типу системы управления делятся на программные — это роботы, работающие по жесткой программе с цикловой или числовой системой программного управления, адаптивные роботы, оснащенные датчиками с управлением от системы ЭВМ или ЧПУ, позволяющими реагировать на изменение некоторых условий эксплуатации, и интеллектуальные роботы, управляемые от ЭВМ с программированием цели и обладающие широкими возможностями реагирования на изменение технологии процесса, распознавания объектов, принятия решений и т. п.
Основные схемы манипуляторов промышленных роботов
Основой схем манипуляторов являются кинематические цепи, не образующие структурные замкнутые контуры, звенья которых соединены кинематическими парами 3,4,5-го классов. Положение каждого звена таких кинематических цепей изменяется обычно отдельным приводом. Если привод смонтирован на звеньях, составляющих кинематическую пару, то такая кинематическая пара называется приводной. Наибольшее распространение получили манипуляторы с поступательными и вращательными приводными кинематическими парами 5-го класса, однако известны конструкции с приводными парами цилиндрической 4-го и сферической 3-го классов. Число степеней свободы манипулятора с кинематическими парами 5-го класса соответствует числу приводных кинематических пар.
Функционально манипулятор состоит из двух частей — транспортирующей и ориентирующей (Рис. 8.9). Звенья, составляющие транспортирующую кинематическую цепь, предназначены для переноса объекта манипулирования в заданную точку пространства. Для этой цели достаточно трех степеней свободы, поэтому в состав транспортирующих кинематических цепей входят обычно четыре звена, включая и неподвижное звено — стойку манипулятора, составляющие три приводные кинематические пары 5-го класса.
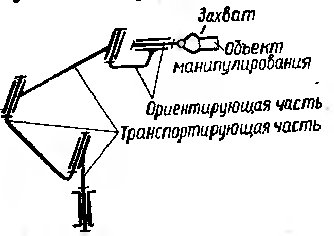
Рис. 8.9. Манипулятор промышленного робота
При этом могут быть четыре основные схемы (Рис. 8.10). При трех поступательных кинематических парах (Рис. 8.10, а), движение заданной точки D1 звена 3 организуется в прямоугольной системе координат, при одной вращательной и двух поступательных (Рис. 8.10, б) — в цилиндрической, при двух вращательных и одной поступательной (Рис. 8.10, в) — в сферической системе координат.
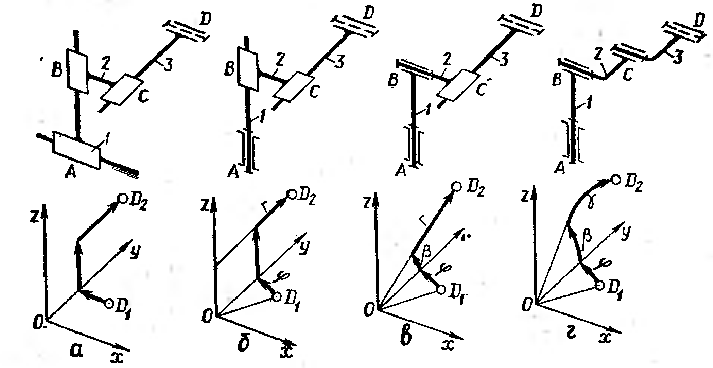 Рис.
8.10 Транспортирующие кинематические
цепи
Рис.
8.10 Транспортирующие кинематические
цепи
Датчики.
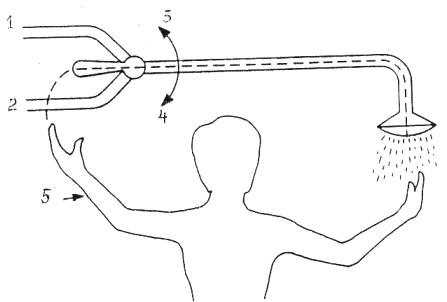
Рис.8.11.
1 - горячая вода; 2 - холодная вода; 3 - холоднее; 4 - горячее; 5 – «линия обратной связи»
Управление системами
Предположим, Вы стоите в Вашей ванной под душем. Ваша цель - отрегулировать душ так, чтобы вода имела приятную для Вас температуру. Как достичь этого?
Вероятно, Вы поступите так же, как поступил бы каждый: повернете холодный и горячий краны и подставите руку под струю, чтобы узнать температуру воды. Если вода слишком холодна, Вам предстоит решить: открыть посильнее горячий кран или прикрыть холодный. Не убирайте руку из-под крана: рука - Ваш датчик! - и продолжайте настраивать краны. Рано или поздно желаемая температура будет достигнута. Можно влезать под душ. Впрочем, если кто-то еще на кухне захочет воспользоваться горячей водой, не исключено, что температура воды в ванной чувствительно снизится. Придется произвести другие действия: вскрикнуть и начать настраивать опять краны, заорать тому другому, чтобы он убрался подальше от горячей воды и выскочить из-под душа или проделать и то и другое.
Перед Вами пример системы управления:
♦ Ваш мозг /блок принятия решения/ - регулятор системы.
♦ Душ - управляемая система или процесс.
♦ Управляемый выход - действительная температура воды.
♦ Ваша рука (а затем и Ваше тело) - датчик.
♦ Горячий и холодный краны - исполнительные устройства.
♦ Когда Вы нашли температуру воды неподходящей для себя, Вы сыграли роль обратной связи.
Пожалуй, это наиболее существенные элементы типичной системы управления, которые используются в промышленной автоматике.
Разомкнутые и замкнутые системы
Основные принципы управления системами, которые встретятся в этой лекции, используются во всех инженерных дисциплинах: механике, электротехнике, электронике, аэронавтике и, более того, - во многих неинженерных науках, например в менеджменте и экономике.
Системы управления делятся на два типа: разомкнутые и замкнутые. Обратимся к хорошо знакомому примеру, чтобы уяснить смысл этих понятий.
На Рис. 8.12 изображены основные элементы центральной отопительной системы.
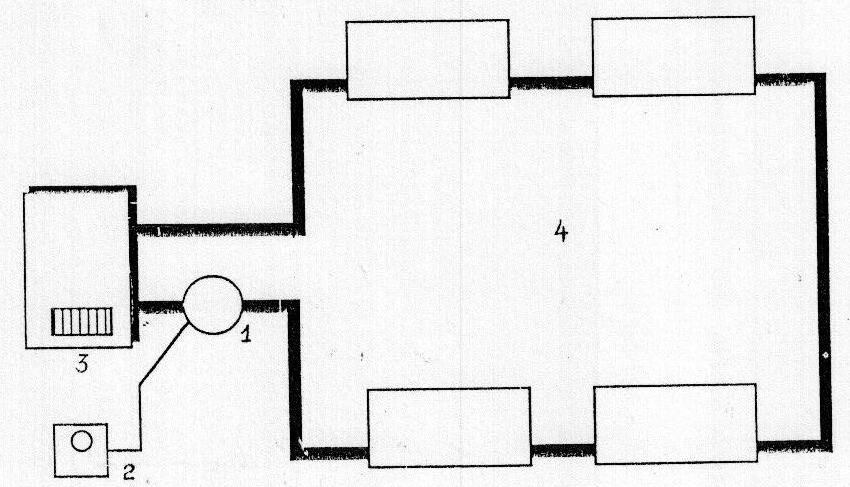
Рис. 8.12 Схема домовой отопительной системы: 1 – насос, 2 - бойлер; 3 - термостат;4 - радиаторы
В бойлере нагревается вода, которая подается насосом по трубам в радиаторы. Они-то и обогревают лом. Термостату поручено определять температуру в помещении. Когда температура надает ниже заданного уровня, термостат чувствует это и включает реле, запускающее насос. Но вот температура повышается, и реле останавливает насос.
Можно перечислить различные части этой простой системы и присвоить им формальные названия, используемые для всех систем управления (см. рис. 8.13).
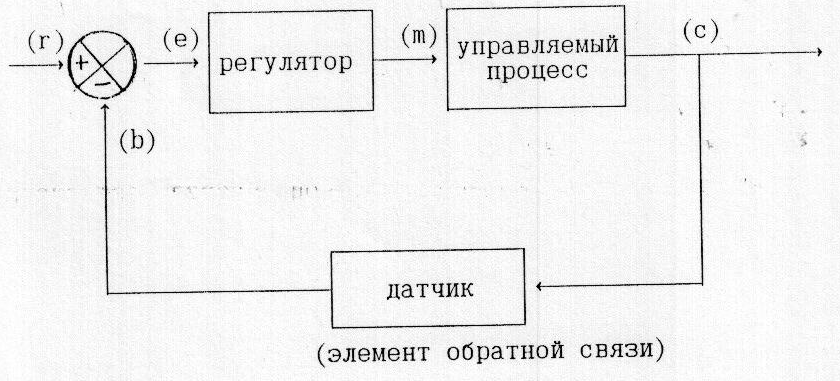
Рис.8.13. Блок-схема замкнутой системы управления: (r) заданный вход (опорный сигнал); (е) сигнал ошибки; (m) управляемая переменная; (с) управляемый выход; (b) сигнал обратной связи.
♦ Водяной насос вместе с радиаторами и водой - управляемая система.
♦ Термостат имеет датчик (скорее всего - биметаллическая пластинка) и регулятор, роль которого играет выключатель. Положение регулятора на щитке термостата определяется значением температуры, которую желательно получить на выходе. Это значение температуры называется опорным сигналом (r).
♦ Действительная же температура помещения - это то, что мы назовем управляемым выходом (с). Эта величина попадает на вход датчика, на основе чего осуществляется первичная обратная связь (b).
♦ Разность между r и b называют сигналом ошибки (е). Именно этот сигнал заставляет регулятор действовать, т.е. в конце концов приводит к включению и выключению насоса.
♦ Выход регулятора называют управляющей переменной (m).
То, что мы сейчас обсуждаем, является примером замкнутой системы потому, что вход регулятора (е) формировался с использованием информации о выходе (с), которая поступала по линии обратной связи. Именно наличие обратной связи, замыкающей контур системы управления, и является определяющим признаком замкнутой системы.
Заменим термостат на таймер. Теперь насос будет включаться и выключаться через определенные промежутки времени независимо от того, какая температура в помещении. Обратная связь исчезла, и мы получили разомкнутую систему.
Свойства замкнутых систем
Применение замкнутых систем управления для технических объектов предполагает использование следующих устройств:
♦ Датчики, необходимые для наблюдения за состоянием управляемого процесса, представляют собой устройства, превращающие физические величины, например, координаты, скорость, ускорение, производительность, давление, температуру и т.п. в сигналы (чаще всего, электрические), которые могут передавать информацию в систему управления.
♦ Компараторы, сравнивающие значения действительных сигналов с опорными.
♦ Один или несколько регуляторов, снабженных устройством, вырабатывающим оптимальное управляющее воздействие. Это может быть и простой выключатель и достаточно сложный компьютер или ПЛК, который должен выбирать наилучший вариант воздействия из многих тысяч.
♦ Исполнительные механизмы, которые должны осуществлять управляющее воздействие. Исполнительные механизмы выполняют функцию, в некотором роде обратную той, которая предписана датчику: они превращают электрические сигналы в конкретные физические действия. Вот примеры: клапаны, управляющие потоком, насосы, реле, шаговые двигатели и др.
Качество функционирования
Для того чтобы понять, насколько хорошо работает система управления, необходимо ввести критерий качества. Для замкнутых систем таковыми, как правило, являются чувствительность, точность, переходные характеристики. Рассмотрим каждый из этих показателей подробнее.
Рассмотрим вначале переходную характеристику, которая, по существу, является реакцией выхода системы на скачкообразное изменение входа (см. Рис. 8.14). Примерами такой "ступеньки" на входе может быть команда роботу занять новую позицию, посылка прямоугольного электрического импульса по линии связи, включение стоп-крана в вагоне поезда и т.д.
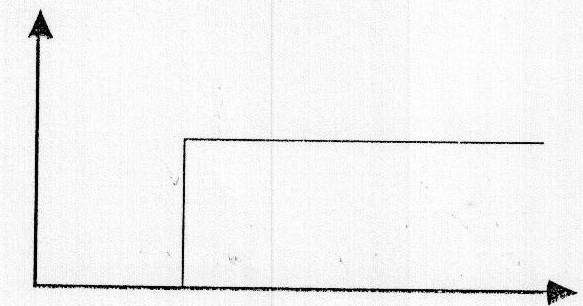
Рис. 8.14. Ступенчатый входной сигнал, подаваемый в систему управления.
Однако среди реальных физических систем не найдется ни одной, которая могла бы своим выходом повторить такой вход, ибо все возможные варианты реакции любой реальной систем сводятся к одному из основных типов:
♦ Система может достаточно быстро отреагировать на новое значение входа, стремясь занять на выходе новое (так называемое равновесное) положение, затем как бы по инерции проскакивает это положение, останавливается, возвращается, но при этом опять проскакивает это положение, на этот раз по пути вниз, и т.д. Такое недостаточно демпфированное движение представлено на рис. 8.15 и носит название колебательной переходной характеристики.
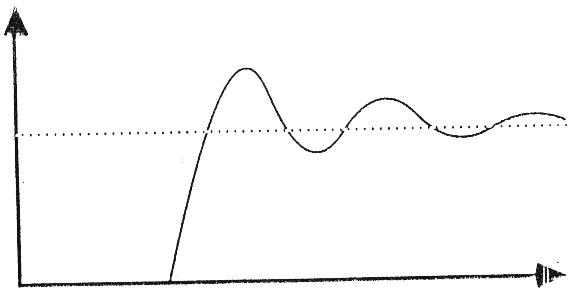
Рис. 8.15. Колебательный выход
♦ система может отреагировать, медленно откликаясь на скачкообразный вход, стремясь к новому положению, настолько постепенно и не спеша, что ни разу не "перепрыгнет" уровень равновесия, подбираясь при этом к нему все ближе и ближе с течением времени, примерно так, как это показано на рис. 8.16.
Такая передемпфированная реакция называется апериодической. Пример системы с такой характеристикой - устройство измерения уровня топлива в баке автомобиля. Будь эта характеристика иная, индикатор откликался бы на каждую неровность дороги и что-либо увидеть на шкале прибора было бы невозможно!
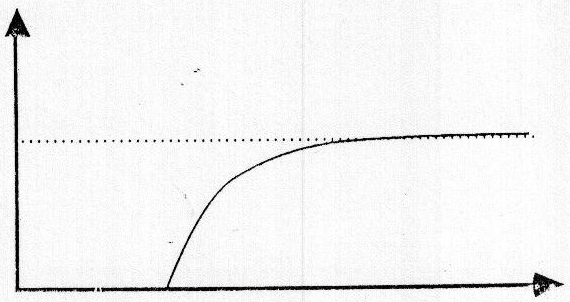
Рис. 8.16. Апериодический выход
Устойчивость систем управления - важнейшая качественная характеристика - говорит о том, придет ли вообще (т. е. за любое время) система к равновесному состоянию.
Хороший пример неустойчивости, зазванной так называемой раскачкой сигнала (или положительной обратной СВЯЗЬЮ), дает "микрофонный эффект" - явление, возникающее, когда микрофон и динамик, объединенные в одну громкоговорящую систему, оказываются вблизи друг от друга. Случайные потрескивания в динамике, попав через микрофон в усилитель, опять оказываются на выходе, но одновременно и на входе, теперь уже в усиленном виде, и т.д. Процесс развивается лавинообразно и проявляется в виде неожиданно сильного, резкого звука. Ясно, что во многих других случаях неустойчивость переходной реакции может вывести систему из строя.
В отличие от устойчивости, чувствительность является количественной характеристикой системы и определяет меру влияния заданного входного сигнала на величину выходного.
Например, если одна термопара реагирует на скачок температуры в одну сотую градуса изменением напряжения в 0.05 мВ, а другая на тот же скачок температуры отвечает перепадом напряжения в 0.1 мВ, то легко понять, что вторую термопару можно считать вдвое более чувствительной.
Точность систем управления также является количественной характеристикой и характеризуется в терминах ошибки или, точнее, усредненной разности между реальным и заданным значениями выхода.
Временные запаздывания
Обратимся к Рис. 8.17. где в верхней части изображен процесс изменения температуры воды, вытекающей из душа, о котором зла речь в одном из недавних примеров. Здесь пунктиром изображен уровень, соответствующий желаемой температуре, а сплошной линией - та температура, которая реально имеет место.
На нижней части рисунка приведен вариант выбора последовательности позиций (поворотов) крана горячей воды, ведущий (хотя и не кратчайшим путем) к цели.
Стоит обратить внимание на то, что всегда существует запаздывание (или временной сдвиг) между поворотом крана и понижением или повышением температуры воды в душе.
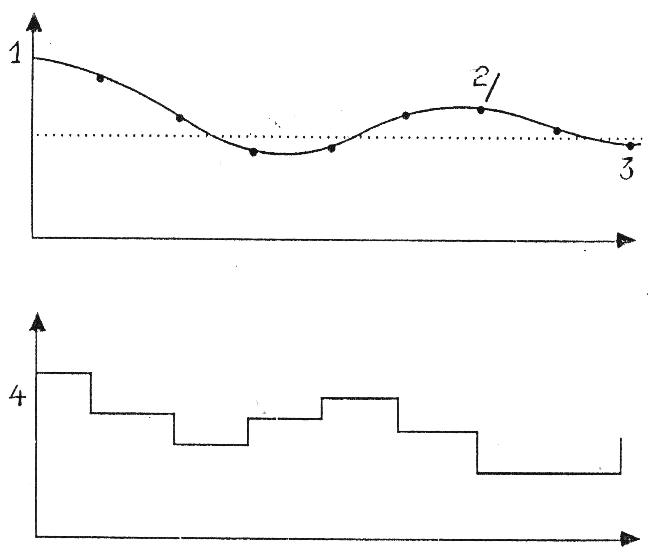
Рис. 8.17. Пример неустойчивой системы - настройка душа по ощущаемым изменениям температуры воды: 1 - измеренная температура; 2 - моменты измерения; 3 - заданная температура; 4 - установка горячего крана.
Почти всегда в системах управления между управляющим воздействием и реакцией на него системы существует тот или иной вид запаздывания, например транспортное или запаздывание типа расстояние - скорость.
Одно из видов запаздывания - экспоненциальное - может быть упомянуто в связи с другим рассматривавшимся ранее примером домовой водоотопительной системы. В самом деле, поворот установочного лимба термостата с 20-го на 30-е деление может вызвать мгновенное включение насоса, но Вам придется подождать с полчасика, пока температура в комнате достигнет желаемого значения.
При этом изменение температуры начнется практически с момента переключения на новое положение регулятора термостата и будет происходить с экспоненциальной (откуда и название) скоростью.
Свойства разомкнутых систем
На Рис. 8.18. представлены компоненты разомкнутой системы управления. Напомним, что разомкнутая система - это такая система, где управляющее воздействие никоим образом не связано с выходом системы и определяется исключительно величиной входного сигнала.

Рис. 8.18. Разомкнутая система управления
Чтобы представлять ценность их практического использовании, в ряде случаев такие системы должны подвергаться тестированию или калибровке, которая гарантировала бы близость выходного сигнала к желаемому уровню при выбранном значении входа.
Примерами таких систем управления являются, в частности, сборник кулинарных рецептов, упоминавшийся ранее тостер для поджаривания хлеба и др.
Разомкнутые системы или системы программного управления сравнительно мало распространены, так как в реальном мире мало что остается неизменным с течением времени. В примере с тостером, скажем, трудности для получения стабильного результата таят в себе скачки напряжения в электрической сети, неодинаковая толщина ломтиков хлеба и др. Но существуют примеры, где разомкнутое управление не нуждается в калибровке и вполне соответствует возложенным на него задачам. К ним относятся всевозможные печатающие устройства, духовые музыкальные инструменты (но в руках опытных операторов или музыкантов), станки с ЧПУ и т.д.
Виды управляющих воздействий
Регулирующие воздействия как реакция на ошибку (разность между истинным значением выхода и его желаемой величиной) могут быть отнесены к одному из пяти классов:
♦ релейное управление (R)
♦ пропорциональное (Р)
♦ интегральное (I)
♦ дифференциальное (D)
♦ комбинированное (PID)
R-управление является простейшим из всех типов управляющих воздействий. Управляющий сигнал имеет вид знаковой функции, амплитуда которой равна 1 либо 0, в зависимости от того, выполняется или нет некоторое логическое условие, наложенное на сигнал ошибки е (например |е| ≥ rа ). На Рис. 8.18 приведены графики изменения температуры и управляющих воздействий R-типа для водяной системы отопления.
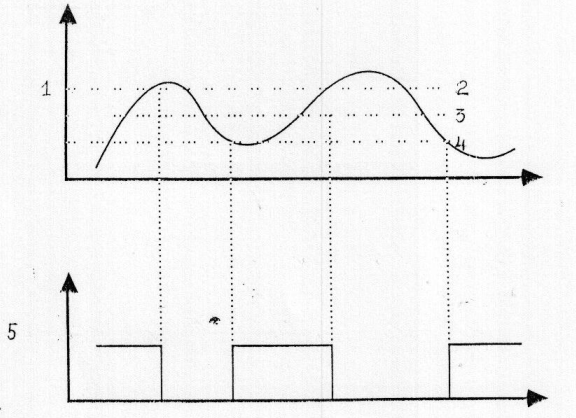
Рис. 8.18. Сенсорные входы и реакция регулятора в релейной системе управления: 1) сенсорный вход в систему, 2) верхний предел, 3) опорный вход; 4) нижний предел; 5) релейное управление.
Качество управления может быть существенно улучшено, если во внимание принять не только качественную характеристику ошибки (например, есть или нет сигнал ошибки), но и величину этого сигнала.
Регулятор, величина сигнала которого пропорциональна величине ошибки, называется пропорциональным. Это означает, что большой ошибке соответствует большой сигнал коррекции, ошибке вдвое меньшей - соответственно вдвое меньший сигнал и т.д.
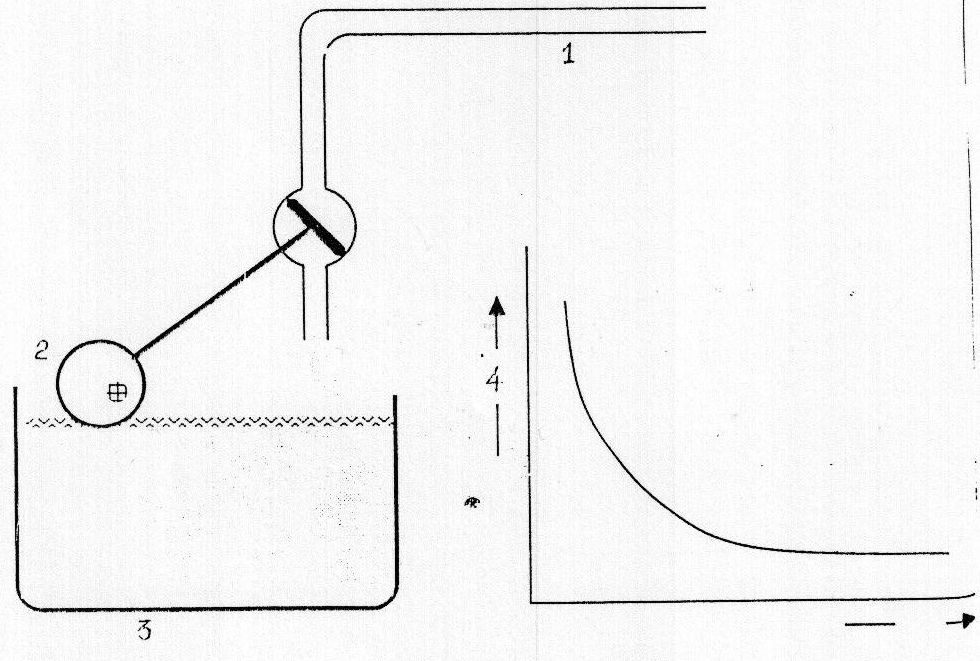
Рис. 8.19 Пример пропорционального управления: 1 - труба для подвода воды; 2 - поплавок; 3 - бак с водой; 4 - график изменения скорости воды
Другой вид регулятора, учитывающего количественную характеристику сигнала ошибки - интегральный. При этом обратная связь по скорости изменения корректирующего воздействия пропорциональна величине ошибки, или, что то же самое, величина корректирующего воздействия пропорциональна площади сигнала ошибки (т.е. его интегралу). Отметим особенность I-регулятора, состоящую в том, что даже когда сигнал ошибки становится равным нулю, корректирующее воздействие сохраняет свою величину, играя роль своего рода "памяти" о прошлом (см. Рис. 8.20).
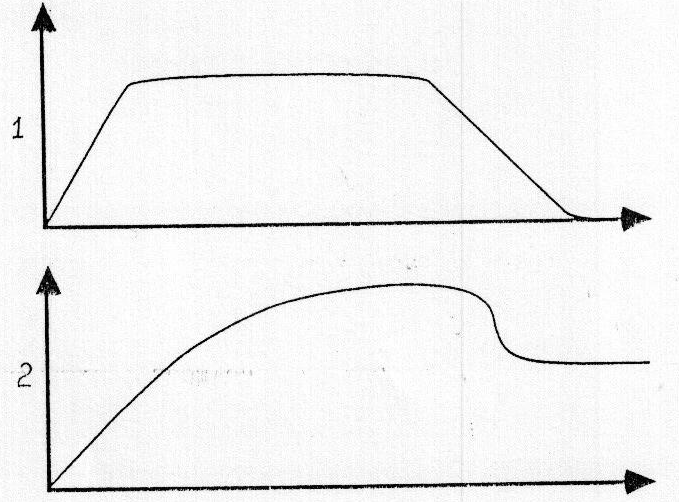
Рис. 8.20. Эффект интегрального управления: 1) сигнал ошибки;