

2) Управляющие воздействие по интегралу
Эта особенность, кстати говоря, делает невозможным использование регуляторов этого типа в "чистом" виде - это сделало бы систему неустойчивой, но его комбинация с пропорциональным (так называемый пропорционально-интегральный регулятор) может представлять практический интерес. Здесь корректирующее воздействие принимает во внимание уже не только величину сигнала ошибки, но и время, в течение которого он отличен от нуля. Ясно, что эта возможность делает управление более гибким, реагирующим как на "настоящее", так и на "прошлое " сигнала ошибки.
Еще один вид управления, как бы "заглядывающий в будущее" или предсказывающий возможную величину сигнала ошибки, осуществляется с помощью дифференциальных регуляторов. Корректирующее воздействие в этом случае пропорционально скорости изменения сигнала ошибки Особенность D-регулятора состоит в том, что остаточная, но постоянная величина сигнала ошибки вызовет такую же нулевую реакцию D-регулятора, как и ее полное отсутствие. Корректирующее воздействие же при таком виде управления будет "чувствовать" только крутизну фронта сигнала ошибки, что, собственно, и составляет основу прогноза ошибки на ближайшее будущее (См. Рис. 8.21)
Практика систем управления допускает комбинацию в виде пропорционально-дифференциального регулятора.
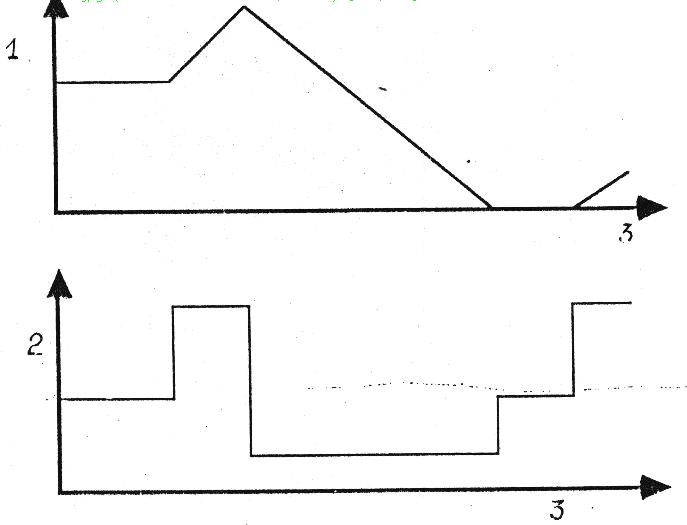
Рис. 8.21. Эффект дифференциального управления: 1) сигнал ошибки; 2) управляющее воздействие по производной; 3) время
Однако чаще всего встречается комбинация всех трех видов управления в виде пропорционально-интегрально-дифференциального регулятора. Настройкой каждой из компонент этого сложного регулятора для любой конкретной системы может быть достигнут режим оптимального (в заранее обусловленном смысле) управления.
Числовое управление в цепи обратной связи
Рассмотрим с позиций изложенных фактов теории управления с обратной связью и некоторых сведений о датчиках один практический пример. Простой станок состоит из управляемого двух- или трехосного стола, с закрепленной деталью, подлежащей сверлильной или фрезерной обработке. Вращение стола вокруг осей осуществляется серводвигателями постоянного тока, скорость вращения которых поддается весьма точному регулированию посредством приложенного напряжения.
Цепь обратной связи содержит два датчика, один из которых обеспечивает информацию о скорости, а другой – об угловой позиции стола.
В качестве датчика скорости используется тахогенератор – небольшой генератор постоянного тока с постоянным магнитом, величина выхода которого пропорциональна скорости вращения. В качестве датчика позиции используется инкрементальное кодирующее устройство, изображенное на Рис. 8.22, где внешняя часть прозрачного диска состоит из чередующихся прозрачных и непрозрачных областей. По одну сторону диска расположен источник света, по другую - фотоэлемент, который регистрирует количество прерываний светового пучка.
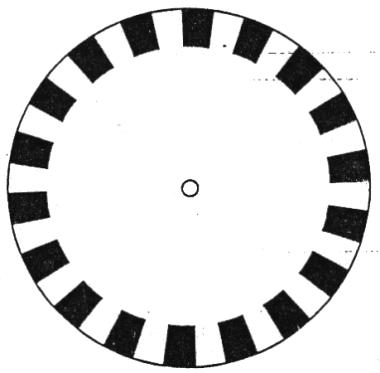
Рис. 8.22. Инкрементальный датчик кода (шифратор)
Другое, так называемое "абсолютное кодирующее устройство", приведено на Рис. 8.23. Как легко видеть, каждый из его 15 секторов соответствует одному из чисел натурального ряда от 1 до 15 в двоичном коде.
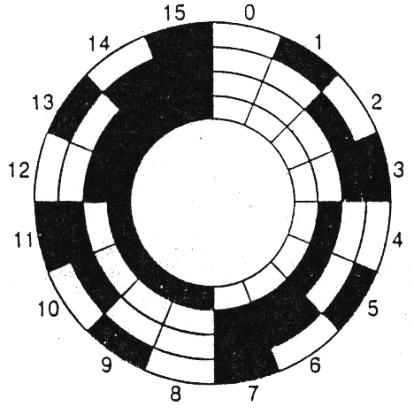
Рис. 8.23. Модель вращающегося диска абсолютного датчика кода
Аналоговые и цифровые сигналы
Компьютер, используемый для управления техническими объектами (таким компьютером является и ПЛК), почти всегда представляет собой цифровую систему и воспринимает только дискретные сигналы. В то же время большинство датчиков, используемых в автоматических системах, имеют только аналоговый выход, непрерывно меняющийся в определенном диапазоне (в отличие от дискретного, принимающего лишь конечное число фиксированных значений в диапазоне изменения).
Аналоговые сигналы
На Рис. 8.24 дан пример аналогового сигнала. Как можно видеть, величина сигнала меняется с течением времени: она может быть положительной, достигать максимума, а затем уменьшаться до отрицательного значения, проходя при этом все промежуточные значения, в том числе и нуль.
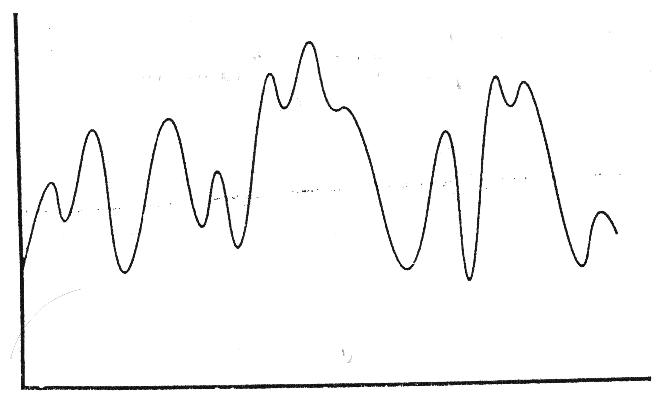
Рис. 8.24. Случайный аналоговый сигнал
Обратимся теперь к Рис. 8.25 Здесь можно увидеть другой пример аналогового сигнала, обладающего очень важным свойством –периодичностью, т.е. самоповторяемостью через определенный промежуток времени, называемый периодом. Количество периодов, содержащихся в одной секунде, - частота - является также очень важной характеристикой сигнала. Частота измеряется в герцах (Гц).
Одним из примеров периодической функции является синусоидально изменяющийся сигнал на рис. 8.25.
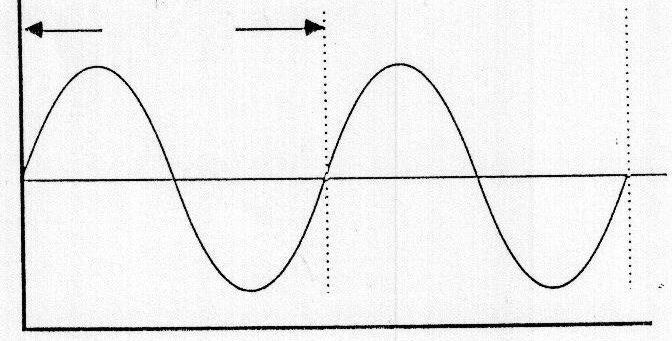
Рис. 8.25. Синусоидальный аналоговый сигнал
Цифровые сигналы
Как уже говорилось, цифровой сигнал - любое из конечного набора значений. Частным случаем такого сигнала является двоичный сигнал, для которого набор возможных состояний определяется лишь двумя уровнями. Такие двоичные или бинарные сигналы характерны для процессов, протекающих в компьютерах.
Следует иметь в виду, что всякий двоичный сигнал - цифровой, но не всякий цифровой сигнал - двоичный.
На Рис. 8.26. дан пример двоичного (бинарного) сигнала, соответствующему двоичному числу, записанному по оси времени.
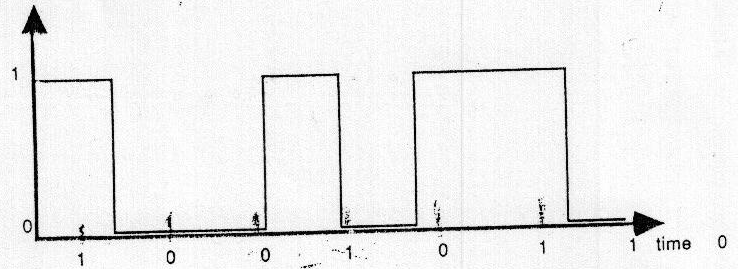
Рис. 8.25. Цепочка импульсов двоичного сигнала
Бионика и кибернетика — теоретические основы роботостроения
Бионика — стержень робототехники
Если роботы первою поколения, похожие на бесчувственные часовые механизмы, известны человечеству с давних времен, то роботы второго и третьего поколений смогли появиться лишь в XX веке, вслед за выдающимися достижениями современной науки и техники. Своим существованием они обязаны бионике и кибернетике. Эти науки создали научный фундамент для построения мыслящих машин высших поколений.
Необходимость приспособления (адаптации) роботов к изменяющимся условиям внешней среды потребовала разработки для них органов чувств, аналогичных человеческим: слуха, зрения, осязания. Здесь конструкторы вынуждены были обратиться за консультацией к природе, создавшей у живых существ самые разнообразные органы чувств.
Цель бионики (так называется эта сравнительно новая наука) — перенесение в технику принципов действия систем, управляющих живыми организмами.
За время развития жизни на Земле в процессе естественного отбора природа создала массу замечательных образцов живых «инженерных систем». Многие изобретения природы заимствовались людьми для создания конструкций еще в древности. Так, древние арабские врачи, изучая глаз человека, создали линзы — подобие хрусталика глаза. Великий русский ученый Н. Е. Жуковский, исследовав полет птиц, разработал теорию подъемной силы крыла и современную аэродинамику. Таких примеров — множество.
Ученым — бионикам принадлежит идея использования биоэлектрических сигналов мышц для управления. С давних времен люди искали способы вернуть руку тем, кто ее лишился. И это удалось сделать советским ученым. Они использовали биотоки мышц. Известно, что, когда человек двигает рукой или ногой, в его мышцах возникают биотоки. Появляющиеся в мышцах биопотенциалы можно снять с помощью электродов и усилить. Первую модель искусственной руки, управляемой биопотенциалами, изготовили в СССР в 1957 году. В 1960 году в Москве на Конгрессе по автоматическому управлению 15-летний мальчик, у которого не было кисти руки, взял протезом кусок мела и написал на доске ясно и четко: «Привет участникам Конгресса!». Протезом его кисти управляли биотоки мышц.
Итак, несмотря на слабость биотоков, усилитель мышечной энергии можно наделить богатырской силой.
Проблема «человек — машина»
С возникновением машин, облегчивших человеческий труд, перед бионикой появилась проблема взаимоотношений человека и машины.
Здесь выявилось очень много интересного. Так, было установлено, что во многих производственных процессах (например, при управлении автомобилем или самолетом) полная замена человека автоматическим устройством либо невыгодна, либо невозможна. Следовательно, встает проблема оптимального распределения обязанностей между человеком и машиной. Интересно сравнить характеристики человека и технических устройств, в частности сопоставить эффективность их работы в различных условиях.
В процессе биологической эволюции физиологическая и психологическая конституция человека приспособилась к условиям земного существования. Довольно узкий диапазон изменения температуры и давления воздуха и постоянство его состава, земное притяжение и лучевая энергия, падающая на поверхность Земли, — вот характеристики окружающей среды, в которой проходит жизнь человека. Выход в космос насильственно ставит человека в совершенно новую, непривычную среду. Это может привести к временным или даже необратимым нарушениям в организме человека.
Человек не выдерживает сравнения с автоматом и по чувствительности к воздействию радиоактивного облучения. А радиационная устойчивость электронных систем в десятки раз выше допустимой для человека дозы облучения. Исключительно чувствителен человек и к воздействию ускорений и колебаний температуры. Однако не только это создает трудности при конструировании пилотируемых космических кораблей. Следует учитывать и такие проблемы, как обеспечение возможности дыхания и питания человека в космическом корабле, а также удаления продуктов обмена, контроль за мышечной деятельностью и действием системы кровообращения в условиях невесомости и, наконец, психологическую подготовку экипажа к полету в космос. Следует иметь в виду также, что человек подвержен усталости и его работоспособность временами значительно понижается, в то время как автоматы способны работать надежно длительный срок.
Что такое кибернетика?
Итак, робот с помощью своих органов чувств получил информацию о внешней среде: он увидел, услышал, почувствовал... Теперь нужно реагировать на полученные сигналы: протянуть руку, взять нужную деталь, с большой точностью установить ее на место, закрепить винтами и т. д. Как все это выполнить «по-человечески» — плавно, без лишней суеты, рывков? Ответ на этот вопрос дает кибернетика. Кибернетика неотделима от бионики. Говорят даже, что кибернетика родилась «под знаком робота».
В самой краткой формулировке кибернетика — это наука об общих законах управления в живых и неживых системах. Сейчас даже школьник знает, что такое электронная вычислительная машина, луноход и робот. Все это — кибернетические машины.
Моделирование — экспериментальная основа роботостроения
Пытаться конструировать радиоэлектронные системы роботов, не представляя хорошо их теории и физических основ, — это значит работать с очень низким коэффициентом полезного действия. Создать какую-либо систему робота, не понимая ее сути, невозможно. Работа должна строиться на прочной основе теоретических знаний — только тогда конструктор с каждой новой разработкой будет расширять диапазон своих знаний и переходить к новым рубежам творчества.

Рис.8.26. График, показывающий возможности суперкомпьютера
Искусственная жизнь
В создании искусственной жизни (ИЖ) можно выделить три основные направления исследований: создание «нейронных» роботов с автономным питанием, создание нанороботов (в том числе и с возможностью «размножения»), создание компьютерных программ (матобеспечение). Наиболее совершенным типом искусственной жизни на Земле на сегодняшний день являются компьютерные программы. Роботы, способные к самовоспроизводству, еще не изобретены, а ждать появления нанороботов придется еще достаточно долго. По этой причине остановимся сейчас только на компьютерных программах ИЖ.
В подобных программах «жизнь» существует исключительно в виде цепочек электрических импульсов, которые генерируются программой в памяти компьютера. Специалисты-компьютерщики создали массу различных программ ИЖ, моделирующих различные биологические процессы (выживание, рождение, смерть, развитие, движение, кормление, спаривание и т.д.). Некоторые из них называются «клеточная автоматизация» (кластеризация), другие имеют название «генетических» алгоритмов.
Программа клеточной автоматизации (КА) была использована для точного моделирования биологических систем и исследования характера распространения заразных заболеваний, таких как СПИД в человеческой популяции. Подобные программы также применялись для исследования эволюционных процессов, поведения колоний муравьев и пчел и множества других стохастических систем. Для генерации случайных процессов в программы были введены специальные стохастические алгоритмы. Одним из интересных применений было использование КА программ для оптимизации размеров нейронных сетей, использованных в головном компьютере. Есть надежда, что подобные программы помогут создать и «связать» большие нейронные сети для использования в суперкомпьютерах.
Генетические алгоритмы (ГА) функционируют в духе Дарвиновской теории выживания сильнейшего. Две конкурирующие ГА программы могут «встретиться» в памяти компьютера и перемешать свои двоичные коды для произведения «потомства». Если «потомок» окажется так же или более жизнеспособным по сравнению с «родителями», то, вероятнее всего, он выживет. Являются ли эти программы живыми — это, очевидно, зависит от определения жизни. Что если появятся программы, способные к саморазвитию и повышению собственного «программного» уровня? Что произойдет, когда подобные программы будут встроены в передвижных роботов? Как насчет роботов, научившихся производству себе подобных?
Нанороботы — мы живые существа?
Наноробот представляет собой робота, имеющего размеры микроба.
Фирме IBM удалось достичь определенных успехов в создании электронных и механических устройств (транзисторы и проводники), имеющих молекулярные или даже атомарные размеры. Подобные достижения вселяют уверенность в возможности создания предметов сколь угодно малых размеров, поэтому роботы размером с бактерию теоретически возможны.
Некоторые ученые предсказывают, что следующим эволюционным шагом будет возникновение жизни на основе кремния, которая заменит на планете углеродные формы жизни. То, что мы сейчас называем электронными устройствами и роботами, станут формами саморазвивающейся и саморазмножающейся силиконовой жизни.
Что такое искусственный интеллект?
Законный вопрос, не правда ли? Безусловно, развитие нейронных сетей приведет сперва к появлению «интеллекта», а потом уже — «сознания». В попытке создания сетей, которые интеллектуальны или демонстрируют интеллект, каким критерием нужно руководствоваться, чтобы понять, что цель уже достигнута?
Британский математик Алан Тьюринг предложил интересную процедуру, которая, в общем, считается достоверной для определения того, имеет ли машина интеллект. Человек и машина вступают в беседу, посылая сообщения по телетайпу. Если машина может поддерживать общение таким образом, что человек не в состоянии определить — кто находится на другом конце линии телетайпа: человек или машина, то машина определяется как «мыслящая». Эта процедура называется тестом Тьюринга и является одним из критериев определения ИИ.
Хотя тест Тьюринга является общепринятым, он не является окончательной процедурой определения ИИ. Существует ряд совершенно «тупых» языковых программ, которые практически способны пройти эту процедуру. Наиболее известной из них является программа ELIZA, разработанная Джозефом Вейценбаумом в Массачусетском технологическом институте. ELIZA имитирует работу психолога, и вы можете с ней побеседовать. Например, если вы послали ELIZА сообщение, что вы потеряли своего отца, она может ответить: «Почему вы потеряли своего отца» или «Расскажите мне больше о своем отце». Эти ответы могут вас заставить вас поверить в то, что ELIZA понимает вашу речь. Это не так, конечно. Ответы есть хитро сконструированные утверждения на основе ваших сообщений.
Таким образом, если мы хотим, то можем отбросить критерий Тьюринга и взять что-то еще. Возможно, лучшим указанием на существование интеллекта будет наличие сознания или самосознания. Машина, осознающая себя, будет точно знать, что она разумна. Другим возможным критерием, более прямым и простым, может служить способность обучения на основе опыта.
Конечно, мы можем отбросить все логические основания и утверждать, что интеллект свойственен системам, имеющим развитое чувство юмора.
Насколько мне известно, человекообразные являются единственными существами, способными смеяться. Возможно, наличие чувства юмора и эмоций будет лучшим критерием и поставит точку в его поисках.
Исполнительные механизмы для моделей роботов
Воздушные мышцы
Воздушная мышца представляет собой простое устройство, предложенное в 1950-х годах Дж. Л. МакКиббеном. Подобно биологическому прототипу воздушная мышца сокращается при активировании. Интересен тот факт, что воздушная мышца представляет собой достаточно точную копию биологической мышцы-прототипа, что позволяет исследователям, прикрепляя подобные мышцы к точкам скелета, соответствующим положению «живой» мускулатуры, моделировать биомеханические и иннервационные процессы низкого уровня, характерные для биологической мышцы. В опубликованной литературе подобные конструкции также называются воздушными мышцами МакКиббена, искусственными пневматическими мышцами МакКиббена и «Резиномышцами». Здесь будет использовать название «воздушная мышца».
Применения
Воздушные мышцы находят применение в робототехнике, биомеханике, создании искусственных протезов конечностей и промышленности. Основной причиной, по которой экспериментаторы и любители охотно используют воздушные мышцы, является простота их конструкции и легкость использования в сравнении с обычными пневматическими цилиндрами. Воздушные мышцы имеют малый вес, «гибкую» конструкцию и высокое отношение развиваемой ими силы по отношению к собственному весу (400:1); они выдерживают продольное скручивание, не требуют параллельности закрепления концов и могут быть изогнуты внешним ограничителем без нарушения работы.
Принцип работы воздушной мышцы
Воздушная мышца состоит из двух основных частей: внутренней растягивающейся мягкой резиновой трубки и внешней сетчатой ячеистой оплетки (рукава), изготовленного из капрона (см. Рис. 8.27). Резиновая трубка называется «внутренним пузырем» и заключена внутрь рукава оплетки.
Прочие компоненты включают воздушный патрубок на одном конце резиновой трубки и две петли на каждом из концов воздушной мышцы, позволяющие прикрепить мышцу к остальной части конструкции.
При подаче давления во внутренний пузырь он расширяется и давит изнутри на стенки рукава оплетки, что вызывает увеличение его диаметра. Физические характеристики рукава таковы, что его продольное сокращение пропорционально увеличению его диаметра, что обусловливает появление силы сокращения в воздушной мышце.
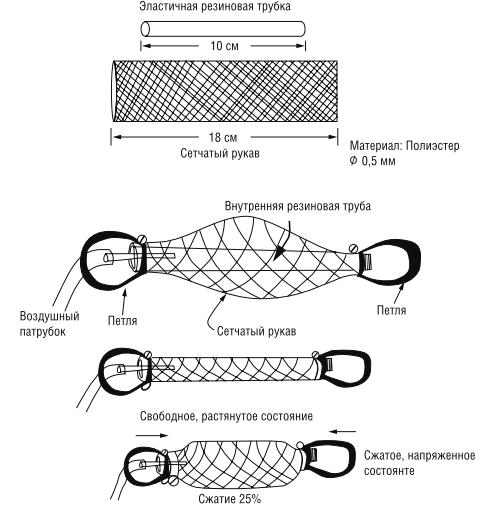
Рис. 8.27. Устройство и работа воздушной мышцы
Необходимо отметить, что для правильной работы мышцы в состоянии «покоя» она должна быть растянута или нагружена. В противном случае эффект сжатия не будет выражен. Как правило, подобные конструкции воздушной мышцы способны сжиматься до 25% от их первоначальной длины.
Нитиноловая проволока
Нитинол представляет собой сплав, относящийся к классу материалов, обладающих «памятью» формы. Нитинол обычно выпускается в виде проволоки. При нагревании материал способен сокращаться до 10% от первоначальной длины. Подобное сокращение способно производить линейное движение.
Кроме свойства сокращения, этот сплав обладает свойством «памяти».
Эффект памяти является уникальным свойством этого сплава. При нагревании до температуры критического перехода сплав автоматически приобретает первоначально заданную форму. Процесс задания первоначальной формы, которую «помнит» материал, называется процедурой термального отжига. Сплав принудительно заключается в требуемую форму и подвергается процессу отжига при температуре выше критической. Такой процесс приводит к изменению кристаллической решетки сплава. После этого при любом повышении уровня температуры выше критической материал «вспомнит» приданную ему первоначально форму. Изделие из такого материала можно подвергать изгибу или скручиванию, но оно обязательно примет исходную форму при критическом нагревании.
Эти уникальные свойства определяются структурой кристаллической решетки сплава. Возвратная сила может достигать 1500 грамм на кв.см. Вряд ли кто-то будет использовать материал столь большого поперечного сечения. Даже достаточно тонкая проволока способна производить очень большую силу. К примеру, проволока диаметром 6 мм создает возвратную силу в 350 грамм.
Объем нитиноловой проволоки при сокращении до уровня 10% остается постоянным. По мере сокращения ее диаметр пропорционально возрастает, обеспечивая постоянство объема.
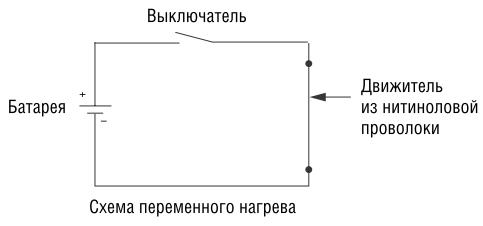
Наиболее простым способом нагревания нитиноловой проволоки является пропускание через нее электрического постоянного тока (см. Рис. 8.28). Однако длительное пропускание постоянного тока может привести к разрушению проволоки в силу ее неравномерного омического нагрева. Повреждений проволоки при нагревании и поддержании в нагретом состоянии можно избежать, использую широтно-импульсный источник постоянного тока.
Некоторые конструкторы роботов используют нитиноловую проволоку в приводе безмоторного шестиногого движущегося робота. Робот действительно способен передвигаться, но делает это крайне медленно, поскольку для цикла нагревания и охлаждения нитиноловой проволоки требуется значительное время. Конструкция такого шестиногого «ползающего» робота очень легка (он весит несколько унций), однако он имеет достаточную мощность, чтобы нести «на себе» собственный источник питания.
Петли из нитиноловой проволоки могут быть использованы для создания вращения. На Рис. 8.29 изображен такой простой «тепловой» движитель. Каждое колесико имеет паз, в котором находится нитиноловая проволока. Для лучшей теплопроводности меньшее колесо изготовлено из латуни. Когда меньшее колесо помещено в воду — оно начинает вращаться. Подобный тепловой движитель может работать и от солнца. Если сфокусировать на маленьком колесе лучи солнца с помощью 3 - дюймовой лупы, то устройство начнет работать.

Рис. 8.29 Тепловой двигатель
Нитинол также может быть использован в механических выключателях кнопочного типа, например в качестве привода небольших воздушных клапанов или в других механизмах, требующих линейных перемещений.
Серво (рулевые машинки)
Сервомоторы представляют собой двигатели постоянного тока, снабженные редукторами и системой обратной связи контроля положения. В любительских целях подобные моторы используются для контроля положения органов управления в радиоуправляемых моделях. Вал такого мотора может поворачиваться или удерживаться на углах не менее 90o от среднего положения.
В силу широкого использования таких устройств в самодельных конструкциях, их выпускаемый ассортимент достаточно разнообразен (см Рис. 8.30). Существуют большие сервомоторы, используемые в промышленности, но они достаточно дороги для любительского применения.

Рис. 8.30. Серво (Рулевая машинка)
Сервомотор имеет три вывода. По двум из них подается питающее напряжение от 4 до 6 В. На третий вывод подается сигнал позиционирования. Сигнал позиционирования представляет собой цепочку прямоугольных импульсов длительностью от 1 до 2 мс. Соответственно, импульс, соответствующий среднему положению будет равен 1,5 мс. Импульсы подаются с частотой порядка 50 в секунду (50 Гц), т.е. время между импульсами составляет порядка 20 мс. Такой «средний» импульс вызовет поворот вала мотора в среднее положение ±45 град.
Поворот вала сервомотора ограничен 90 градусами (±45 град. от среднего положения). Импульс длиной 1 мс вызовет поворот вала мотора влево до упора (см. Рис. 8.31), в то время как импульс в 2 мс вызовет аналогичный по ворот вправо. Варьируя длину импульсов в пределах 1-2 мс, можно добиться поворота вала двигателя на любой угол внутри указанного интервала.
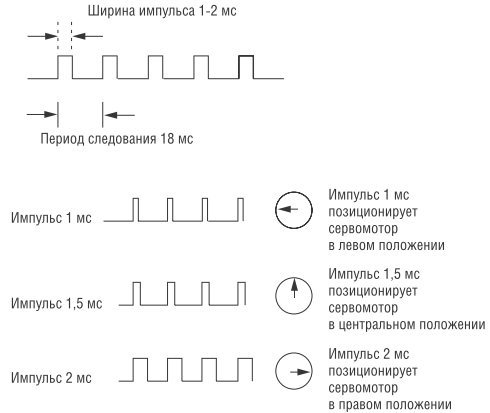
Рис. 8.31. Управляющие импульсы для сервомотора
Может показаться, что генерация подобных импульсов представляет собой достаточно сложную задачу. На самом деле это не так. Для управления сервомотором PIC — микроконтроллер 16F84 использует лишь несколько простых команд. Такой PIC может управлять одновременно восемью сервомоторами. Другим удобным методом управления сервомоторами является использование R/C систем. Альтернативой этому может служить создание собственной схемы управления.
Двигатели постоянного тока
Двигатели постоянного тока для любительского конструирования могут использоваться для движения и перемещения конструкций роботов (см. Рис. 8.32). Для большинства таких двигателей характерны высокая частота вращения ротора и небольшой крутящий момент. Конструкции роботов, напротив, требуют большого крутящего момента при невысокой частоте вращения.

Рис. 8.32. Двигатель постоянного тока
Для этого могут быть использованы редукторы (см. Рис. 8.33). Редуктор характеризуется передаточным числом, т.е. отношением скоростей вращения на входе и выходе.
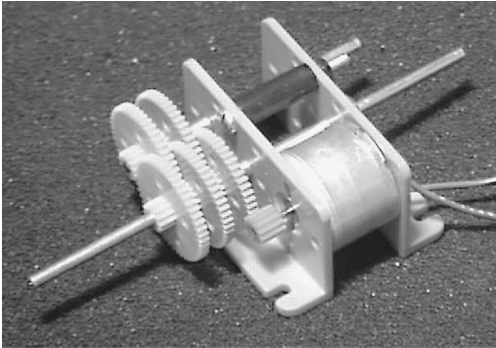
Рис. 8.33. Двигатель постоянного тока с редуктором