

II.1.4. Наезд тс на велосипедиста или мотоциклиста
Экспертное исследование наезда автомобиля на велосипедиста (мотоциклиста) производится в той же последовательности, что и исследование наезда на пешехода.
Условие пересечения велосипедистом полосы движения автомобиля при своевременном торможении, предпринятом водителем автомобиля:

где S’в – путь равномерного движения велосипеда в случае экстренного затормаживания автомобиля;
Lв – габаритная длина велосипеда (Lв = 1,5… 1,9 м);
Ва – габаритная ширина автомобиля;
Δу – интервал между велосипедистом и границей опасной зоны;
Δб – интервал безопасности.
В то же время
где vB – скорость движения велосипеда;
tа.н. – время движения автомобиля до наезда на велосипедиста:
где vн – скорость наезда.
При попутном движении автомобиля и велосипеда (рис. 2.6, а) удаление автомобиля от места наезда
![]()


Рис. 2.6. Схема к определению удаления автомобиля от места наезда
на велосипедиста в момент возникновения опасной обстановки Syд
при движении автомобиля без торможения:
а – при попутном движении автомобиля и велосипеда;
б – при встречном движении автомобиля и велосипеда;
S'B – путь равномерного движения велосипеда в момент экстренного затормаживания автомобиля;
vB — скорость движения велосипеда;
Время движения велосипеда
При встречном движении автомобиля и велосипеда (рис. 2.6, б)
При замедленном движении автомобиля
где верхние знаки относятся к наезду автомобиля на велосипед, движущийся в попутном направлении, а нижние – во встречном.
Приведенные зависимости можно использовать при исследовании наезда автомобиля на мотоциклиста. Дальнейшие экспертные исследования наезда автомобиля на велосипедиста и мотоциклиста проводят так же, как и экспертные исследования наезда на пешехода.
III. Методики исследования наезда тс на пешехода, перемещающегося в поперечном направлении, при ограниченной видимости и обзорности
III.1. Наезд на пешехода при обзорности, ограниченной неподвижным препятствием
III.1.1. Наезд при постоянной скорости движения
На рис. 3.1 изображена схема графического метода определения удаления транспортного средства от места наезда на пешехода в момент, когда препятствие уже не ограничивало видимости пешехода
Рис. 3.1. Схема графического метода определения удаления транспортного средства от места наезда на пешехода в момент, когда препятствие уже не ограничивало видимости пешехода, Syд при обзорности, ограниченной неподвижным препятствием:
Syд – расчетное удаление;
аx ау – координаты места водителя в транспортном средстве;
S'n – полный путь пешехода до места водителя;
Bп – ширина неподвижного препятствия;
Δх – расстояние между линией следования пешехода и препятствия.
Для определения расстояния, на каком находилось движущееся ТС от места наезда в момент, когда стоящее ТС уже не ограничивало для водителя видимость пешехода, необходимо произвести предварительные расчеты и определить удаление движущегося ТС от места наезда в момент начала движения пешехода по проезжей части. После этого в масштабе следует нанести размеры проезжей части с указанием ее границ, положения места наезда, ТС, неподвижного препятствия, полосу движения ТС, траекторию движения пешехода.
На схему наносят положение I ТС, соответствующее положению пешехода в момент начала его движения (точка I’). Затем проводят прямую от рабочего места водителя (точка А) до точки I’ и устанавливают, ограничивает ли стоящее ТС видимость пешехода. Если не ограничивает, сравнивают Syд с остановочным путем So и делают соответствующий вывод.
При фронтальном ударе удаление ТС от места наезда на пешехода в тот момент, когда водитель имел возможность его увидеть, можно определить из подобия треугольников ABC и BCD (рис. 3.2, а).
Рис. 3.2. Схема к определению удаления транспортного средства от места наезда на пешехода в момент возникновения опасной обстановки Syд при наезде на пешехода без торможения транспортного средства и обзорности, ограниченной неподвижным препятствием:
а – наезд совершен передней частью транспортного средства;
б –
наезд совер
П – положение пешехода до начала движения.
Получаем
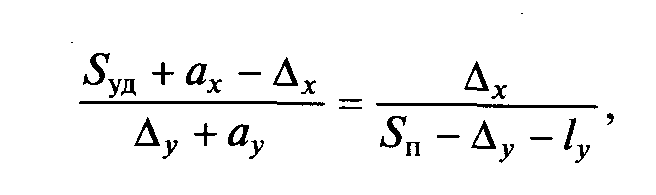
где Syд – удаление ТС от места наезда в момент, когда водитель имел возможность увидеть пешехода;
ах, ау – координаты рабочего места водителя;
Δх – расстояние между линией следования пешехода и препятствием; Δу – интервал между ТС и препятствием;
Sп – путь пешехода в поле зрения водителя до момента наезда;
1y – расстояние от боковой поверхности ТС до места удара.
Из условия равенства времени движения ТС и пешехода до наезда
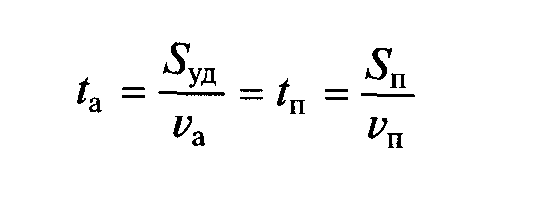
получаем
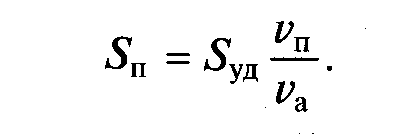
Совместное решение этих уравнений дает

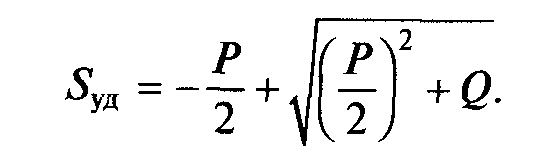
Получается уравнение второго порядка относительно Syд Поскольку значения остальных параметров, входящих в данное уравнение, известны, для упрощения расчетов целесообразно сразу подставить их в уравнение и привести его к виду
![]()
где Р,Q – коэффициенты, зависящие от параметров, входящих в уравнение.
Решение данного уравнения имеет вид
Приведем расчетные формулы для случая, когда удар пешеходу нанесен боковой поверхностью ТС (рис. 3.2, б).
Из подобия треугольников ABE и BCD получаем
В то же время
где 1Х – расстояние от переднего бампера ТС до места удара.
Совместное решение уравнений этих уравнений дает
Откуда находим Sуд.
Сопоставив полученное значение Sуд с остановочным путем S0 ТС, следует сделать вывод о наличии или отсутствии у водителя технической возможности предотвратить наезд на пешехода путем торможения.
При необходимости проверяют также условие безопасного перехода полосы движения ТС пешеходом:
• при фронтальном ударе

где tа н – время движения ТС до наезда на пешехода;
Bа – габаритная ширина ТС;
Δб – расстояние безопасности;
• при боковом ударе
![]()