

2.2. Радиоэлектронные системы извлечения информации
Для радиоэлектронных систем извлечения информации нельзя в явном виде указать источник информации. Такие системы не имеют датчиков. Они лишь принимают сообщения. К классу радиосистем извлечения информации относятся радиолокационные и радионавигационные системы, системы определения параметров движения перемещающихся в пространстве объектов (системы траекторных измерений), радиоэлектронные системы, используемые в радиоастрономии (радиотелескопы), системы и средства радиоэлектронной разведки в радиодиапазоне, а также и некоторые другие.
Если информация извлекается в результате взаимодействия некоторого исследуемого объекта со специальным образом организованным электромагнитным полем (если объект облучается так называемым зондирующим электромагнитным колебанием), то такая система называется активной. Пассивные системы извлечение информации работают без затрат энергии на облучение объекта. Встречаются и промежуточные случаи, когда исследуемый объект облучается, но источник зондирующего излучения и передающая антенна находятся на значительном удалении от приемной подсистемы. Такие системы называют полуактивными или разнесенными (в пространстве). Функциональные схемы, иллюстрирующие принципы организации и работы радиоэлектронных систем извлечения информации, приведены на рис.2.3 а),б) и в).
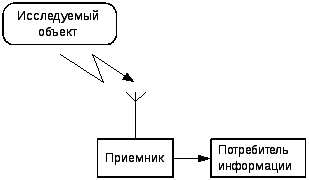
а) пассивная система извлечения информации

б) активная система извлечения информации
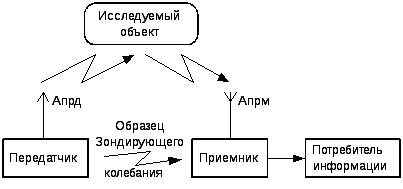
в) полуактивная система извлечения информации
Рис.2.3. Радиоэлектронные системы извлечения информации
Передающие и приемные подсистемы активной радиоэлектронной системы извлечения информации интегрированы настолько, что чаще всего они работают с одной антенной, которая используется и для передачи, и для приема.
В радиолокации, радионавигации и радиометеорологии применяются все виды систем извлечения информации – активные, пассивные и полуактивные, но чаще всего – активные и полуактивные. Такие системы облучают исследуемый объект (в радиолокационных приложениях исследуемый объект по традиции называется "радиолокационной целью" или просто "целью", хотя по нему никто и не прицеливается) зондирующим сигналом. Зондирующий сигнал еще не содержит информации. Информативен только тот сигнал, который содержится в рассеянном объектом электромагнитном поле, точнее – та часть рассеянного радиолокационной целью сигнала, которая доступна приемнику. Или, как говорят, та часть сигнала, которая отражена радиолокационной целью в направлении на приемную антенну радиолокационной станции (РЛС).
Радиолокационные системы извлечения информации в популярной и переводной литературе иногда называются радарами (радар (radar) – сокращение от английских словRAdioDetectingandRanging– радиообнаружение и определение дальности). Но это наименование, по современным взглядам, не точно и не полно. Радиолокационные системы могут гораздо больше, чем обнаруживать цели и определять дальность до них. Так, кроме обнаружения, РЛС способны идентифицировать (распознавать тип, назначение и государственную принадлежность целей). Способны измерять не только дальность, но и другие параметры положения (пространственные координаты), а также прокладывать траектории движения радиолокационных целей.
РЛС при работе используют три фундаментальные физических принципа.
Во-первых, принцип постоянства скорости распространения электромагнитных волн с(скорости света). На основе этого принципа определяют дальностьRдо цели, измеряя время задержкипереизлученного (отраженного) целью зондирующего сигнала:
![]()
Множитель 1/2 учитывает, что за время радиолокационный сигнал проходит расстояниеRдважды – до цели и обратно.
Во-вторых, эффект Доплера, заключающийся в том, что при взаимном движении источника и приемника сигнала, частота сигнала принятого fпротличается от частоты излученного сигнала fизл. И это отличие пропорционально скорости относительного движения (скорости изменения дальностиRмежду передатчиком и приемником):
![]()
В третьих, радиолокационные системы используют возможность направленного излучения электромагнитного поля и приема отраженных целями сигналов и принцип прямолинейного распространения электромагнитного поля. За счет этих эффектов РЛС определяют направление прихода сигнала и, соответственно, угловые координаты цели.
Геометрические соотношения, характеризующие использование принципов постоянства скорости света, прямолинейности и направленности излучения и эффекта Доплера, иллюстрируются рис.2.4.

Рис.2.4. Физические принципы, используемые радиолокационными системами извлечения информации
На рис.2.4. R– наклонная
дальность от РЛС до цели, определяемая
по задержке принятого сигнала относительно
зондирующего;![]() – скорость изменения наклонной дальности
(радиальная скорость, т.е. проекция
вектора скорости целиvна направление наклонной дальности),
измеряемая по доплеровскому смещению
частоты зондирующего сигнала,и– соответственно
азимут и угол места радиолокационной
цели, измеряемые по направлению прихода
отраженного целью сигнала.
– скорость изменения наклонной дальности
(радиальная скорость, т.е. проекция
вектора скорости целиvна направление наклонной дальности),
измеряемая по доплеровскому смещению
частоты зондирующего сигнала,и– соответственно
азимут и угол места радиолокационной
цели, измеряемые по направлению прихода
отраженного целью сигнала.
Радионавигационные системы (РНС) служат для того, чтобы объекты на поверхности Земли, в атмосфере и в Космосе могли определять собственное местоположение. Для этого РНС используют радиопередатчики (радиомаяки), которые, действуя совместно и согласованно, создают в околоземном пространстве специфическое такое поле. По физической природе это электромагнитное поле. Но, чтобы подчеркнуть информационные свойства, его часто называют навигационным полем. Наблюдая сигналы, созданные навигационным полем в каждой точке пространства и определяя параметры этих сигналов, навигационные приемники определяют координаты собственного положения (пространственные координаты) и движения (направление и модуль вектора скорости). Информация о пространственном положении извлекается из радиотехнических параметров принимаемого навигационного сигнала. Например, как на рис.2.5., навигационное поле организовано так, что самолет может определить три радиотехнических параметра – три задержки 1,2и3распространения сигналов, излучаемых тремя навигационными маяками. Маяки расположены в точках с координатами (x1,y1,z1), (x2,y2,z2) и (x3,y3,z3). Вычислив по трем задержкам (радиотехническим параметрам навигационного сигнала) три значения дальностейR1,R2иR3(три навигационных параметра), установленный на самолете навигационный приемник может вычислить пространственные координаты (x0,y0,z0) своего положения в навигационном поле. Действительно, точка расположения навигационного приемника находится на пересечении трех сфер с известным по результатам измерений радиусамиR1,R2иR3 и заданными координатами центров (x1,y1,z1), (x2,y2,z2) и (x3,y3,z3). Эти сферы называются поверхностями положения. Фактически каждая из поверхностей положения, в рассматриваемом случае, это геометрическое место точек, удаленных от соответствующей навигационной точки на величину измеренного навигационного параметра – дальности. Чтобы определить координаты точки (x0,y0,z0), в которой расположен навигационный приемник, нужно выполнить не очень сложные вычисления – решить систему уравнений, связывающих три неизвестных (x0,y0,z0) с заданными координатами навигационных радиомаяков и измеренными дальностями.

Рис.2.5. Определение пространственного положения самолета в навигационном поле дальномерной навигационной системы
В радиоастрономии применяются в основном пассивные системы. Для них информативными являются параметры собственного теплового электромагнитного излучения небесных тел. Однако сейчас появились и активно используются активные системы для радиолокации планет, Луны и некоторых других космических объектов.
Радиоэлектронная разведка также использует пассивные системы извлечения информации о параметрах сигналов, используемых радиоэлектронными системами и средствами противника.
Очень важное место в классе радиоэлектронных систем извлечения информации принадлежит системам для исследования природных ресурсов. Для получения информации о природных ресурсах и экологическом состоянии среды применяют активные, пассивные и полуактивные системы.