

Лекция 01
Предмет или процесс, подлежащий изучению, мы будем называть объектом, а все предметы, взаимодействующие с нашим объектом – внешней средой. Объект будем описывать в виде некоторой системы. Система – набор элементов, находящихся в определённой связи между собой. Элемент обозначается так:

У объекта есть математическая модель, а у внешней среды её нет.
Например, блок наведения ракеты на цель (БНРнЦ):

Объект нужен, чтобы им управлять.
Предмет или производственный процесс, нуждающийся в определённого рода управлении, будем называть объектом управления. Задача управления – изменять протекающие в объекте процессы так, чтобы была достигнута цель управления.
Совокупность объекта и исполняющего устройства, взаимодействие которых приводит к достижению поставленных целей, называется системой автоматического управления. Её обобщённая схема:
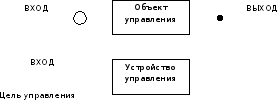
Но есть и более частная схема:

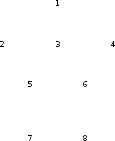
Принципы:
-
Принцип разомкнутого управления.
-
Принцип компенсации.
-
Принцип обратной связи.
Устойчивость – если на вход идёт воздействие, система может повести себя двояко:
а) система работает непонятно и называется неустойчивой;
б) система перешла в конкретное состояние – устойчивое.
Система бывает статической и астатической. Если система при обработке различных внешних воздействий переходит в различные состояния, то она называется статически-устойчивой, а если при воздействиях переходит в одно и то же состояние, то она называется астатически-устойчивой.


Все уравнения делятся на такие:
-
Система автоматического управления.
-
Дискретные системы – описываются разностными уравнениями.
-
Непрерывные системы – описываются дифференциальными уравнениями.
-
Смешанные системы.
-
Стационарные системы – с постоянными коэффициентами.
-
Нестационарные системы – с переменными коэффициентами.
-
Сосредоточенные системы.
-
Распределённые системы.
Лекция 02
x(t) – множество, удовлетворяющее условиям:
-
 при
t<0;
при
t<0; -
Если существует C и M такие, что:
 и
и
 ;
; -
Имеющие счётное количество точек разрыва первого рода на интервале от 0 до ∞.
называется пространством оригиналов.
Преобразование
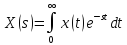 ,
где
,
где
 ,
,
 ,
называется преобразованием
Лапласа.
Обозначение:
,
называется преобразованием
Лапласа.
Обозначение:
 или:
или:
 .
.
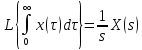
Преобразованием Лапласа присущи свойства:


…

t – это оригинал, s – это изображение.

Предполагается,
что
 .
.
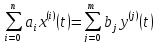
Применим к левой и правой части преобразование Лапласа:

Группируем:

Выразим X через Y:

Пусть
при
 будет
будет
 .
.
Отношение преобразования Лапласа выхода системы к преобразованию Лапласа входа системы при нулевых начальных условиях называется передаточной функцией системы и обозначается W(s):

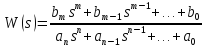
Это основная характеристика системы, определяющая её свойства.
Значения si корней, при которых передаточная функция обращается в ноль, называются нулями системы. Значения si корней, при которых передаточная функция обращается в бесконечность, называются полюсами системы. В системе возможны до m нулей и n полюсов.

Элементы могут быть соединены последовательно, параллельно и при помощи обратной связи. Посчитаем передаточную функцию системы в целом при этих соединениях.
Последовательное соединение элементов:


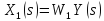

В
общем виде для n
элементов:
 .
.
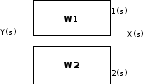
Параллельное соединение элементов:

В
общем виде для n
элементов:
 .
.
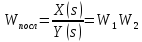
Соединение элементов при помощи обратной связи:
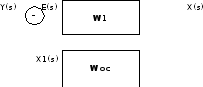
E(s) – преобразование ошибки (передаточная функция ошибки).


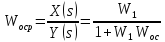
В
общем виде передаточная
функция системы в целом:
 .
.
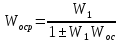
Найдём передаточную функцию ошибки при соединении с обратной связью:



В
общем виде передаточная функция ошибки:
 .
.