

Лекция 03


Так как:




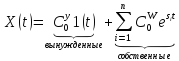
Процесс, порождённый неким входным воздействием, называется переходным процессом системы. Составляющая только входного воздействия называется вынужденным движением системы, иначе … собственным движением.

Для утверждения того, что системы автоматического управления была устойчивой, необходимо и достаточно, чтобы все её полюса были левыми.
Определение. Результат обработки единичного входного воздействия называется переходной характеристикой системы. Обозначение: h(t).
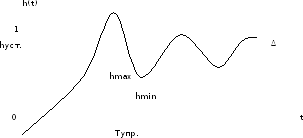
По графику оцениваются параметры:
-
Время управления Tупр. – минимальное время, по истечении которого переходная характеристика будет отличаться от установившегося значения не более чем на некую ∆.
-
Время установления – это минимальное время, по истечении которого переходная характеристика в первый раз достигнет установившегося значения.
-
Коэффициент перерегулирования равен отношению максимального всплеска переходной характеристики к установившемуся значению:
 .
. -
Декремент затухания – характеризует затухание наших собственных процессов:
 .
. -
Коэффициент отклонения:
 .
Если
.
Если
 ,
то система статически устойчива, а если
,
то система статически устойчива, а если
 ,
то система астатически устойчива.
,
то система астатически устойчива.
Воздействие импульса:
На рисунке представлена импульсная функция.

Реакция системы на импульсную функцию называется импульсно-переходной характеристикой и обозначается: k(t). Она является одним из основных свойств системы.
Найдём связь между переходной характеристикой и импульсной переходной характеристикой.




Заменим s на jω:


Пример. Рассмотрим усилитель и определим его параметры.








Лекция 04
Рассмотрим
дифференциатор и определим его параметры.
Он задаётся уравнением вида:
 .
Применив преобразование Лапласа к левой
и правой части, получим:
.
Применив преобразование Лапласа к левой
и правой части, получим:
 .
.




Рассмотрим
интегратор и определим его параметры.
Он задаётся уравнением вида:
 .
Применив преобразование Лапласа к левой
и правой части, получим:
.
Применив преобразование Лапласа к левой
и правой части, получим:
 .
.


Критерии устойчивости.
 – координаты
устойчивости.
– координаты
устойчивости.


 -
без o-малого
выражение называется уравнением первого
приближения.
-
без o-малого
выражение называется уравнением первого
приближения.
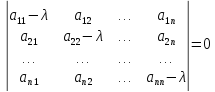
 – характеристическое
уравнение первого приближения.
– характеристическое
уравнение первого приближения.
Критерии устойчивости делятся на 2 типа:
-
Алгебраические критерии устойчивости – это критерии, в которых заключение об устойчивости системы делается на основе анализа только коэффициентов характеристического уравнения первого приближения.
Обобщённый критерий устойчивости Ляпунова. Для того, чтобы система автоматического управления, заданная характеристическим уравнением первого приближения, была устойчивой, необходимо и достаточно, чтобы все корни характеристического уравнения первого приближения были левыми.
Три алгебраических критерия устойчивости:
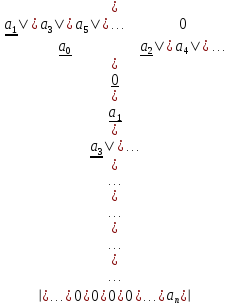
а) критерий устойчивости Раусса. Строится таблица Раусса и заполняется по такому принципу:
|
Номер строки |
r |
Номер столбца |
|||
|
1 |
2 |
3 |
4 |
||
|
1 |
– |
a0 |
a2 |
a4 |
… |
|
2 |
– |
a1 |
a3 |
a5 |
… |
|
3 |
|
|
… |
… |
… |
|
4 |
|
… |
… |
… |
… |



Коэффициент
rj
определяется по формуле:
 ,
где первый индекс – номер столбца,
второй индекс – номер строки.
,
где первый индекс – номер столбца,
второй индекс – номер строки.
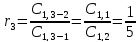
Например, для третьей строки коэффициент rj определяется так:

Для третьей строки коэффициент rj определяется так:

Для
первой строки по номерам столбцов
записываются все чётные элементы, для
второй строки – все нечётные элементы.
Для последующих строк вычисление
происходит по формуле:
 .
.
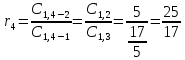
Например, для третьей строки первого столбца элемент определяется так:
 .
.
Для того, чтобы система автоматического управления, заданная характеристическим уравнением первого приближения, была устойчивой, необходимо, чтобы все элементы первого столбца таблицы Раусса имели один и тот же знак.
Пример.
 .
.

|
Номер строки |
r |
Номер столбца |
|
|
1 |
2 |
||
|
1 |
– |
1 |
4 |
|
2 |
– |
5 |
3 |
|
3 |
|
|
… |
|
4 |
|
3 |
… |





У первого столбца одинаковый знак, это значит, система устойчива.
б) критерий устойчивости Гурвица. Матрица с главным определителем строится таким образом:
Считаем определители Гурвица младших порядков.
Для того. чтобы система автоматического управления, заданная характеристическим уравнением первого приближения, была устойчивой, необходимо и достаточно, чтобы все определители Гурвица имели знак, равный a0.
в) критерий Льенара-Шипара – следствие из второго критерия.
Для того, чтобы система автоматического управления, заданная характеристическим уравнением первого приближения, была устойчивой в том случае, если все коэффициенты характеристического уравнения положительны, необходимо и достаточно, чтобы положительными были все определители Гурвица или с чётными индексами, или с нечётными индексами.


