

Министерство образования и науки РФ
ФГБОУ ВПО «Омский государственный технический университет»
Кафедра «Автоматизации и робототехники»
ОТЧЕТ О УНИРС
ИССЛЕДОВАНИЕ МАНИПУЛЯТОРА
Научный руководитель:
д.т.н., профессор_____________________________________________В. Г. Хомченко
подпись
Исполнитель:
студент гр. БМТ-319__________________________________________Д. В. Дьяконов
подпись
Омск 2011
Содержание
Введение 3
1Исходные данные 4
2Построение схемы манипулятора в пространственном виде 5
3Определение численных значений параметров θ, S, a, α, составление таблицы кинематических пар 6
4Составление математической модели манипулятора робота 6
5Расчет положений звеньев манипулятора при начальных значениях обобщенных координат 6
6Расчёт положения схвата в промежуток времени t={0;8} 9
7Построение проекций манипулятора 11
Заключение 15
Библиографический список 15
Введение
Исследование манипулятора заключается в решении прямой задачи кинематики, составлении математической модели кинематики манипулятора и расчета положения звеньев манипулятора при начальных значениях обобщенных координат. Решение прямой задачи кинематики заключается в определении положения схвата манипулятора робота в абсолютных координатах по известным обобщенным координатам.







-
Исходные данные
Закон движения «Синусоидальное ускорение»
ζ = k-0.5/π*sin2πk
Время t = 8c
Обобщённые координаты:
Единица измерения в мм или в градусах, зависимости от типа кинематической пары
|
q1н , град |
q1к , град |
q2н , град |
q2к град |
q3н , мм |
q3к , мм |
|
195 |
295 |
55 |
200 |
105 |
185 |
qи1 = 1000
qи2= 1450
qи3= 80 мм
-
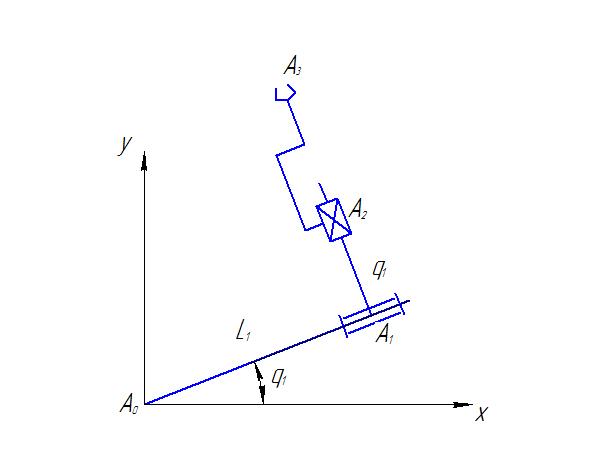
Построение схемы манипулятора в пространственном виде
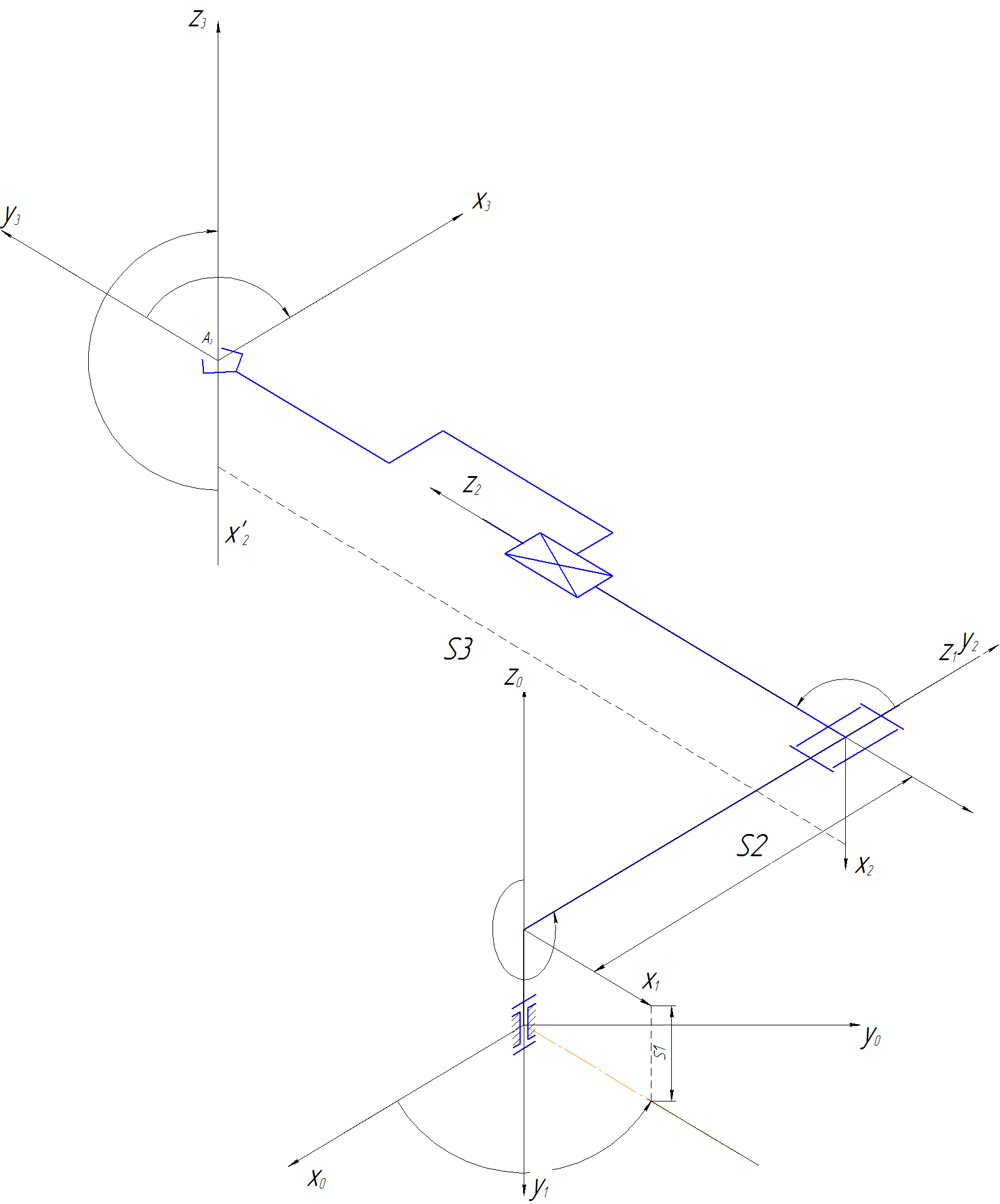
-
Определение численных значений параметров θ, s, a, α, составление таблицы кинематических пар
Параметры кинематических пар
Таблица 1
|
Номер (i-1)-й кинематической пары |
Тип (i-1)-й кинематической пары |
Номер i-го подвижного звена |
Параметры кинематической пары |
|||
|
θ |
S |
a |
α |
|||
|
0 |
вращательная |
1 |
φ1(t) |
60 |
0 |
-90 |
|
1 |
вращательная |
2 |
φ2(t) |
48 |
0 |
90 |
|
2 |
поступательная |
3 |
-90 |
S3(t) |
0 |
90 |
-
Составление математической модели манипулятора робота
Построение матриц перехода 4х4 кинематических пар
1-ое подвижное звено
|
|
cos(φ1(t)) |
- sin(φ1(t)) cos(-90) |
sin(φ1(t)) sin(-90) |
0 |
|
Т0-1 = |
sin(φ1(t)) |
cos(φ1(t)) cos(-90) |
-cos(φ1(t)) sin(-90) |
0 |
|
0 |
sin(-90) |
cos(-90) |
60 |
|
|
|
0 |
0 |
0 |
1 |
2-ое подвижное звено
|
|
cos(φ2(t)) |
- sin(φ2(t)) cos(90) |
sin(φ2(t)) sin(90) |
0 |
|
Т1-2 = |
sin (φ2(t)) |
cos(φ2(t)) cos(90) |
-cos(φ2(t)) sin(90) |
0 |
|
0 |
sin(90) |
cos(90) |
48 |
|
|
|
0 |
0 |
0 |
1 |
3-е подвижное звено
|
|
cos(-90) |
- sin(-90) cos(90) |
sin(-90) sin(90) |
0 |
|
Т2-3 = |
sin (-90) |
cos(-90)cos(90) |
-cos(-90) sin(90) |
0 |
|
0 |
sin(90) |
cos(90) |
S3(t) |
|
|
|
0 |
0 |
0 |
1 |