-
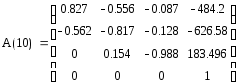
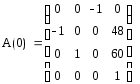
Расчет положений звеньев манипулятора при начальных значениях обобщенных координат
Время t = 8c
![]()
![]()
![]()
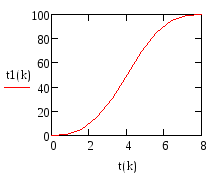
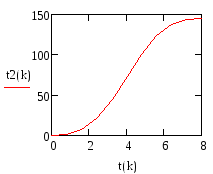
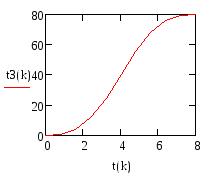
ζ = k-0.5/π*sin2πk
Закон движения
|
k |
ζ |
t |
q1 |
q2 |
q3 |
|
0 |
0 |
0 |
195 |
55 |
105 |
|
0,1 |
0,006 |
0,8 |
195,6 |
55,87 |
105,48 |
|
0,2 |
0,049 |
1,6 |
199,9 |
62,105 |
108,92 |
|
0,3 |
0,149 |
2,4 |
209,9 |
76,605 |
116,92 |
|
0,4 |
0,306 |
3,2 |
225,6 |
99,37 |
129,48 |
|
0,5 |
0,5 |
4 |
245 |
127,5 |
145 |
|
0,6 |
0,694 |
4,8 |
264,4 |
155,63 |
160,52 |
|
0,7 |
0,851 |
5,6 |
280,1 |
178,395 |
173,08 |
|
0,8 |
0,951 |
6,4 |
290,1 |
192,895 |
181,08 |
|
0,9 |
0,994 |
7,2 |
294,4 |
199,13 |
184,52 |
|
1 |
1 |
8 |
295 |
200 |
185 |
|
|
|
|
|
|
|
|
qи,1 |
qи,2 |
qи,2 |
|
|
|
|
100 |
145 |
80 |
|
|
|
|
|
|
|
|
|
|
|
qн1 |
qн2 |
qн3 |
|
|
|
|
195 |
55 |
105 |
|
|
|
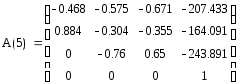
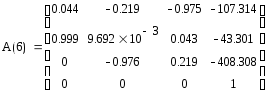
Перемножим матрицы полученные в пункте 2. и выпишем координаты x y z
T = Т0-1* Т1-2* Т1-3
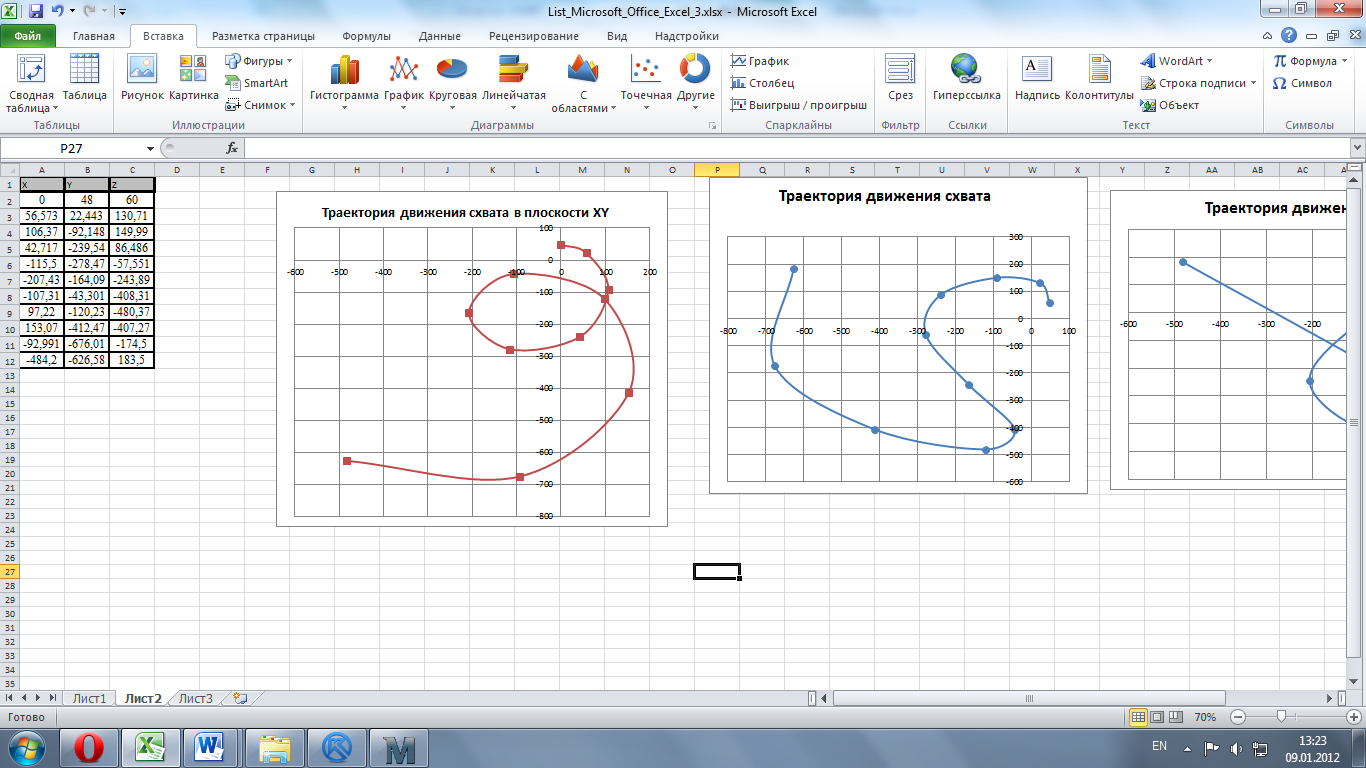
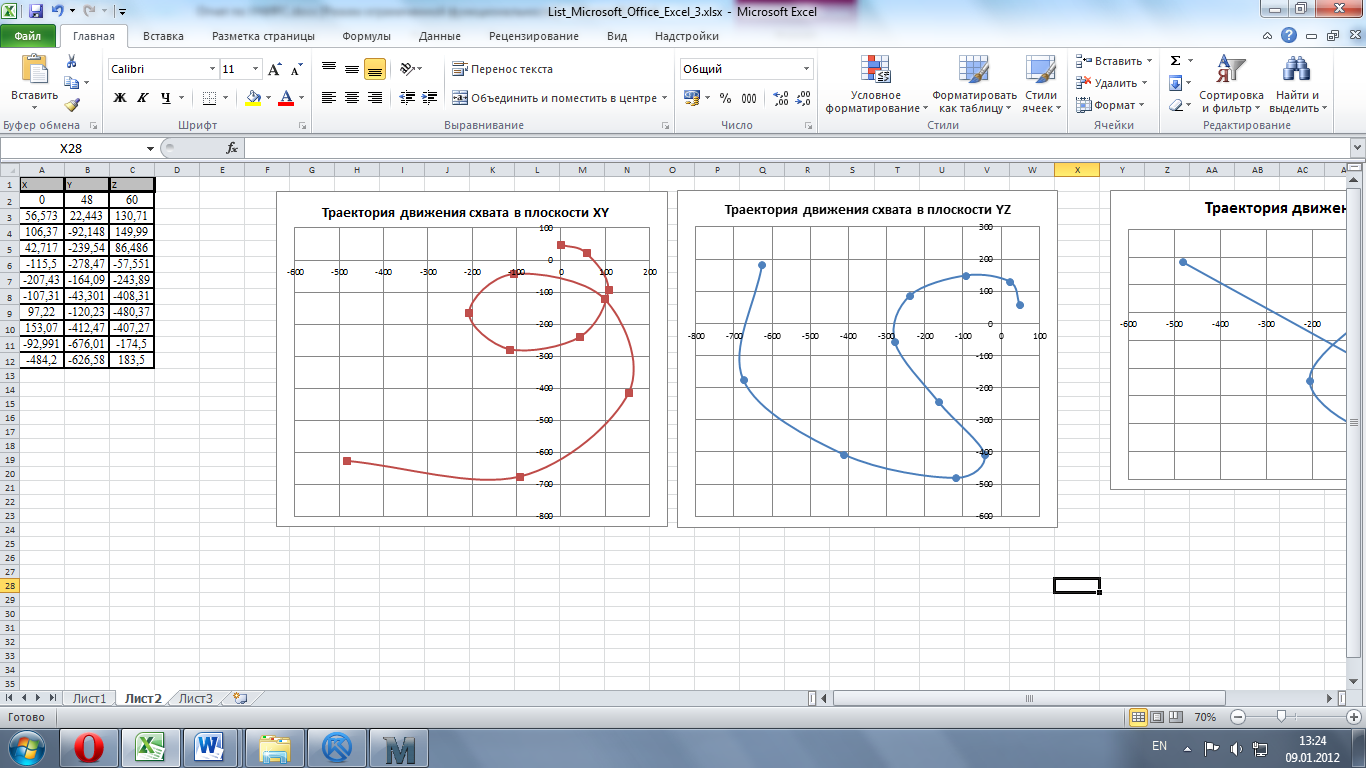
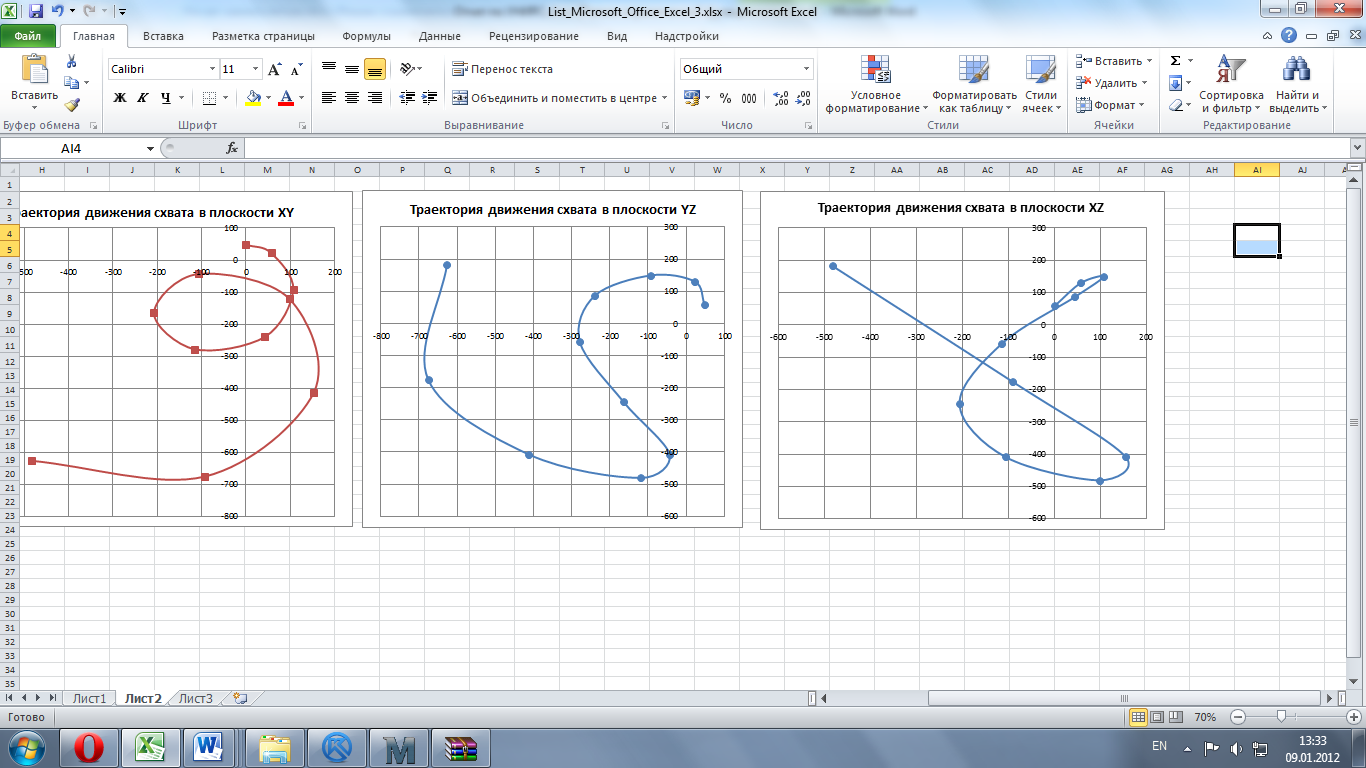
Построение диаграмм
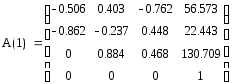
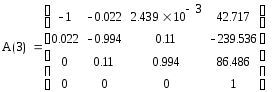
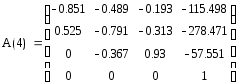
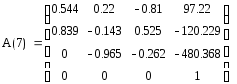
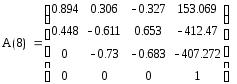
Получим матрицы, где в каждой матрице первые три элемента 4-го столбца представляют собой координаты центра схвата.
Таблица 2
Координаты центра схвата
|
|
x |
y |
z |
|
0 |
0 |
48 |
60 |
|
1 |
56.573 |
22.443 |
130.709 |
|
2 |
106.371 |
-92.148 |
149.989 |
|
3 |
42.717 |
-239.536 |
86.486 |
|
4 |
-115.498 |
-278.471 |
-57.551 |
|
5 |
-207.433 |
-164.091 |
-243.891 |
|
6 |
-107.314 |
-43.301 |
-408.308 |
|
7 |
97.22 |
-120.229 |
-480.368 |
|
8 |
153.069 |
-412.47 |
-407.272 |
|
9 |
-92.991 |
-676.006 |
-174.501 |
|
10 |
-484.2 |
-626.58 |
183.496 |
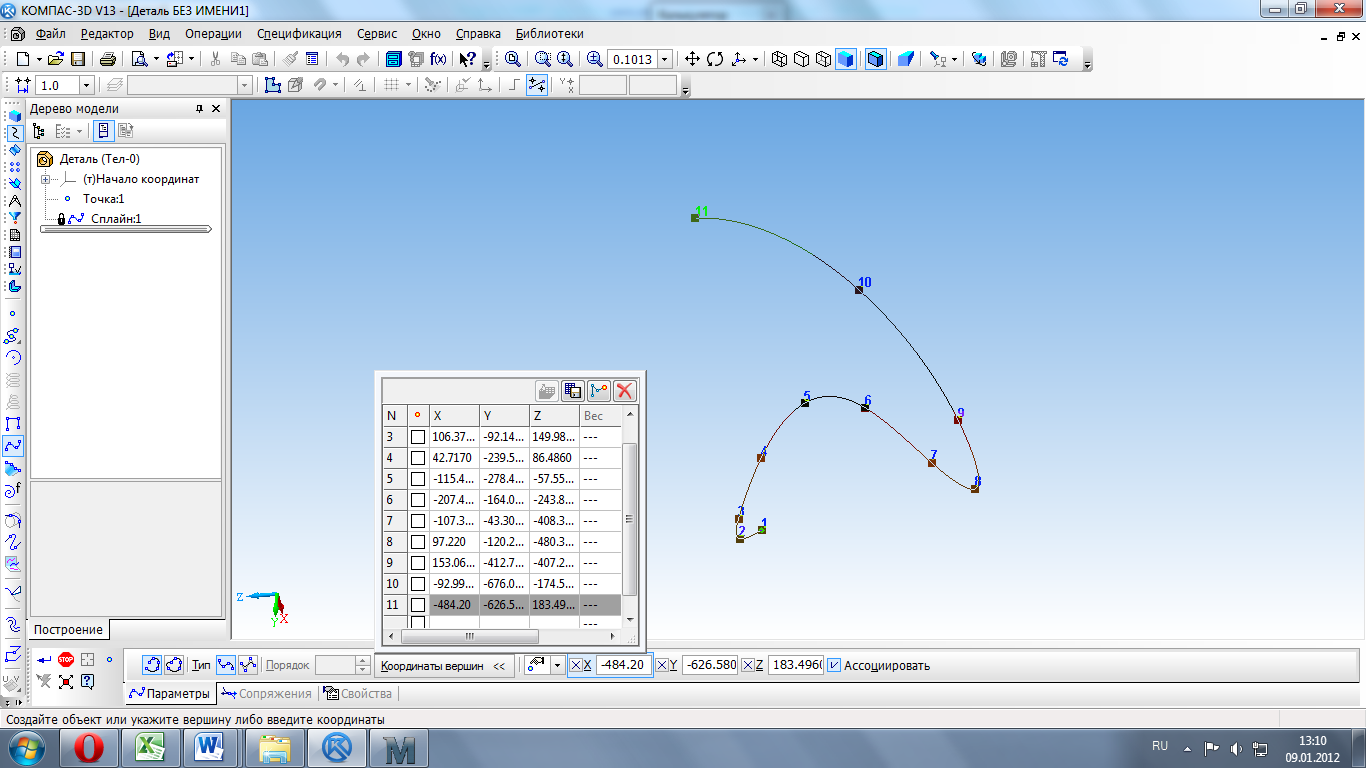
Траектория движения схвата в пространственном виде
-
Расчёт положения схвата в промежуток времени t={0;8}
При t=0
При t=0.8
При t=1.6

При t=2.4
При t=3.2
При t=4.0
При t=4.8
При t=5.6
При t=6.4
При t=7.2
При t=8.0