

-
Построение проекций манипулятора
Для решения данной задачи воспользуемся функциями САПР Компас 3D и построим 3D модель манипулятора в соответствии с размерами и координатами схвата. Первоначально схват манипулятора имеет координаты x = 0, y = 48, z = 60
Нам необходимо переместить звенья таким образом, чтобы схват манипулятора имел координаты в положении K=0.4 при t = 3.2c
X = -115.498
Y = -278.471
Z = -57.551
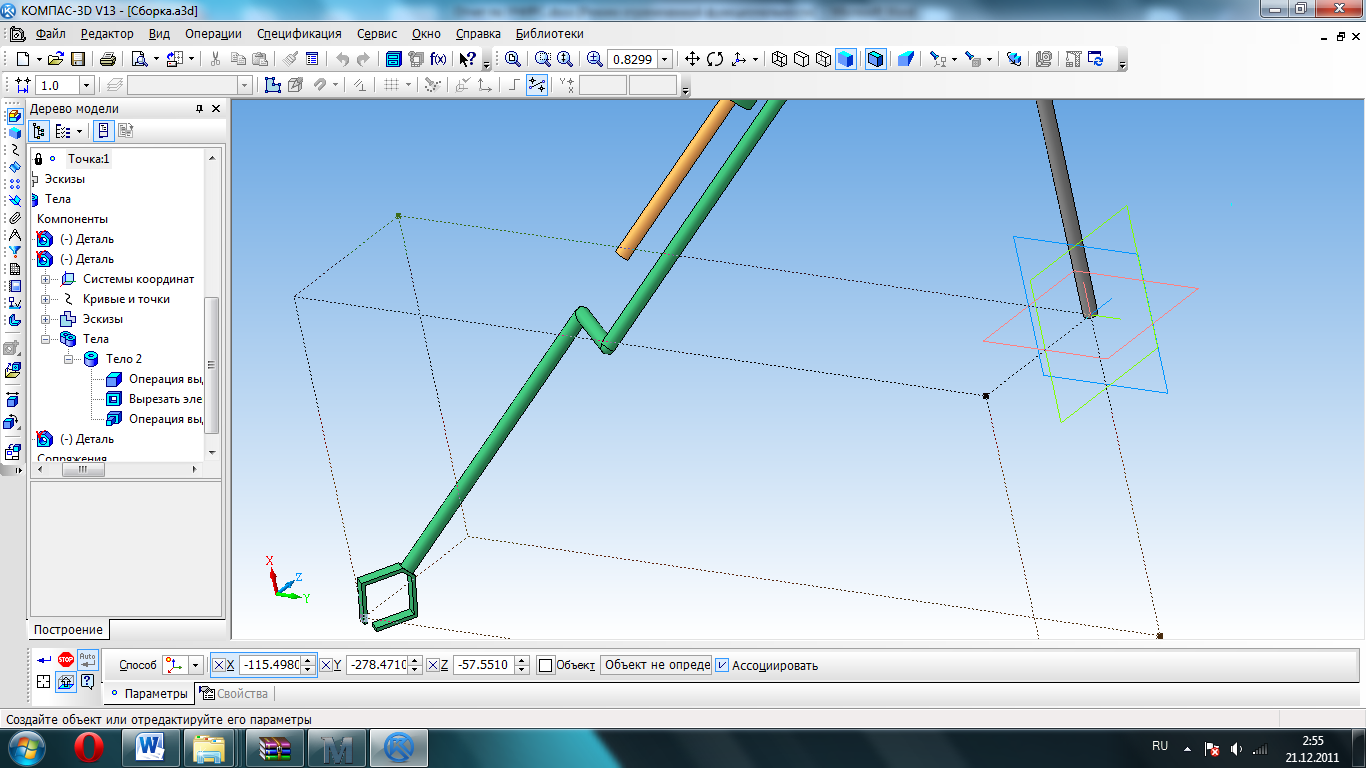
Создадим точку в центре схвата, и воспользуемся функцией сопряжение (совпадение с точкой с необходимыми координатами)
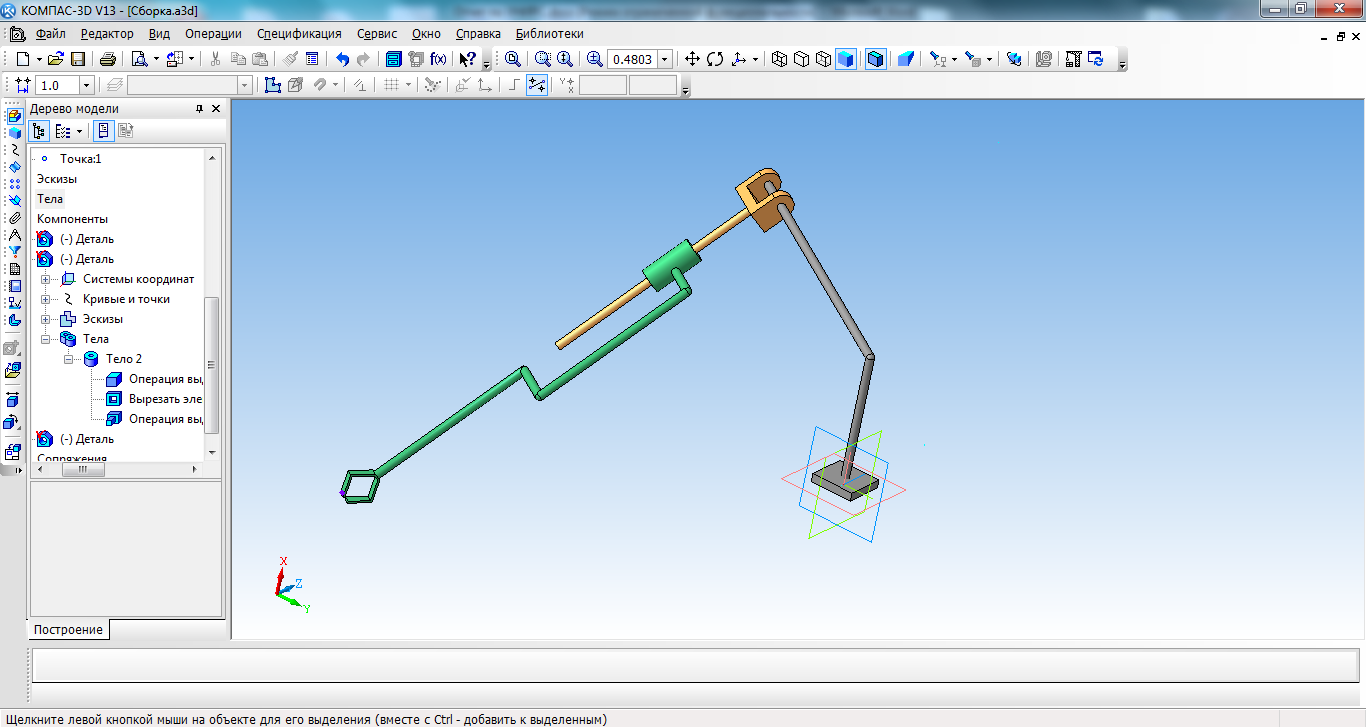
В результате получаем центр схвата с координатами
X = -115.498 Y = -278.471 Z = -57.551 при это точка закрепления остается неизменной
Перемещение происходит в результате вращения звеньев.



Воспользуемся функцией ориентации для отображения проекции на плоскость x0 y0
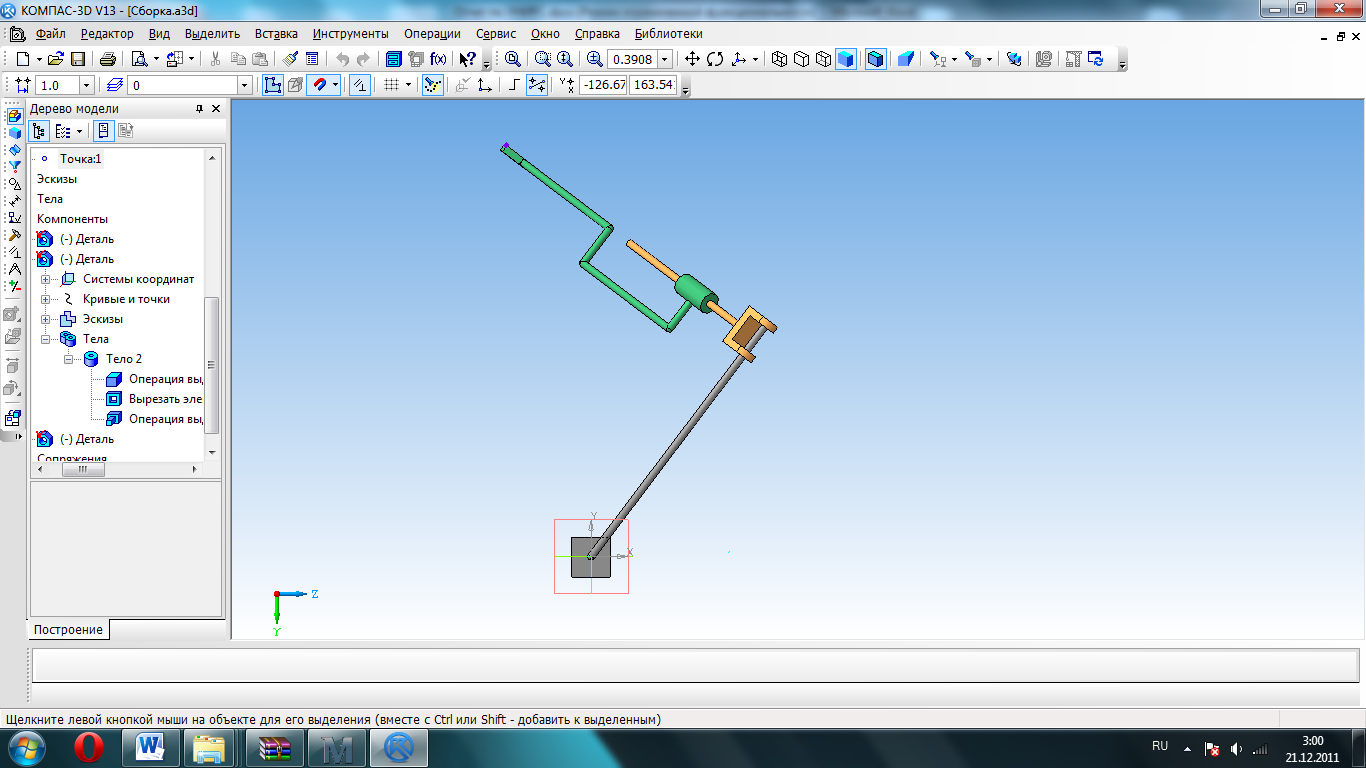
Используя анимацию движения звеньев манипулятора была сделана проверка движения центра схвата строго по координатам заданным в Таблице №2
Положение манипулятора в момент времени при k=0.4
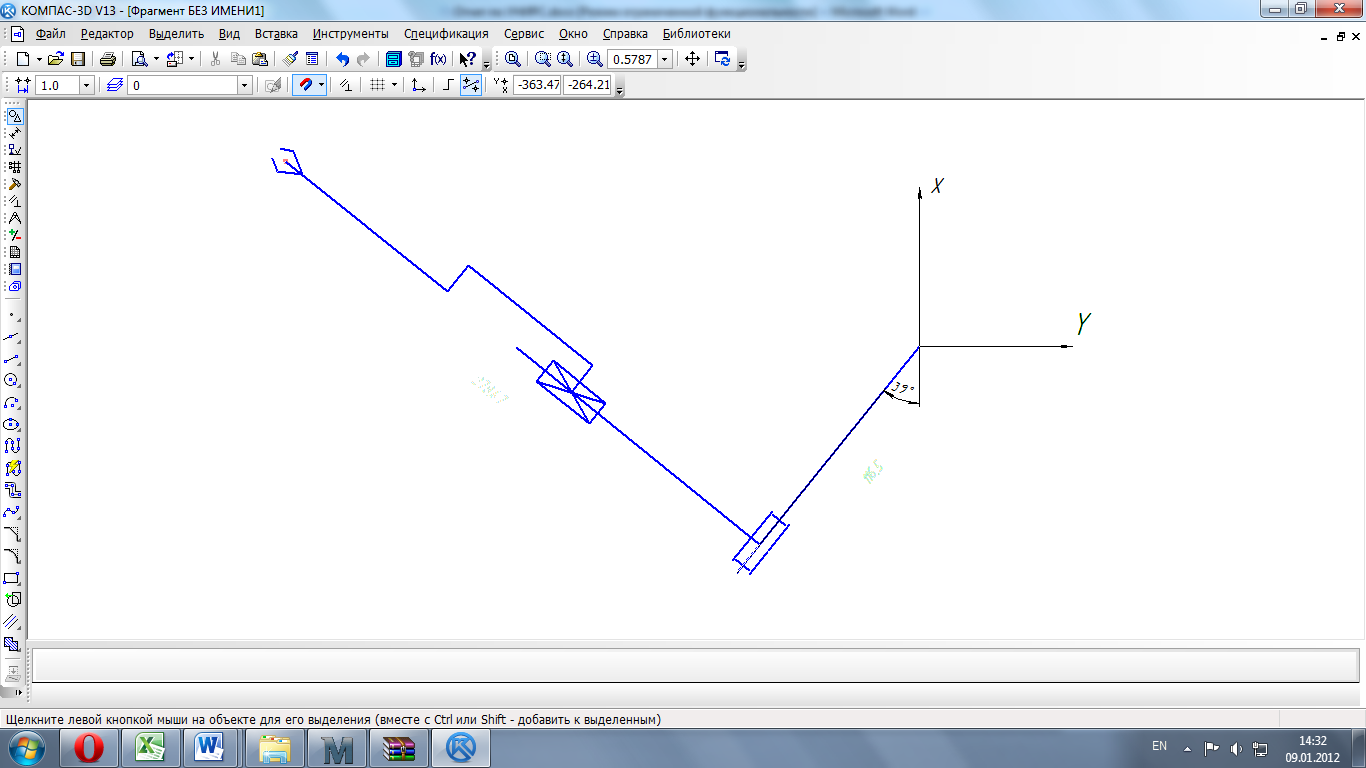
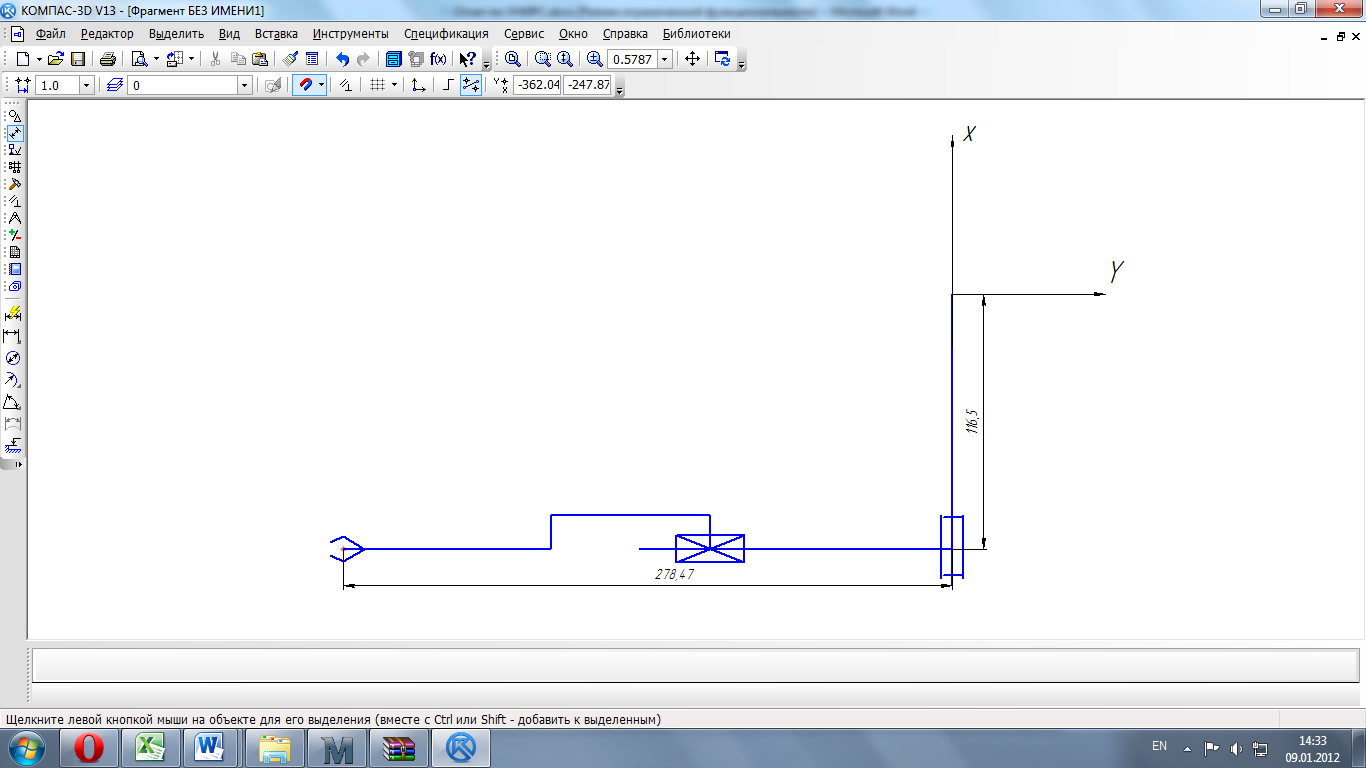
Проекция схвата манипулятора в момент времени при k=0.4 на плоскость XY
Повернем оси на угол 39̊ , чтобы звенья манипулятора совпадали с осями координат.
Найдем проекции звеньев на плоскость XZ для определения координаты Z
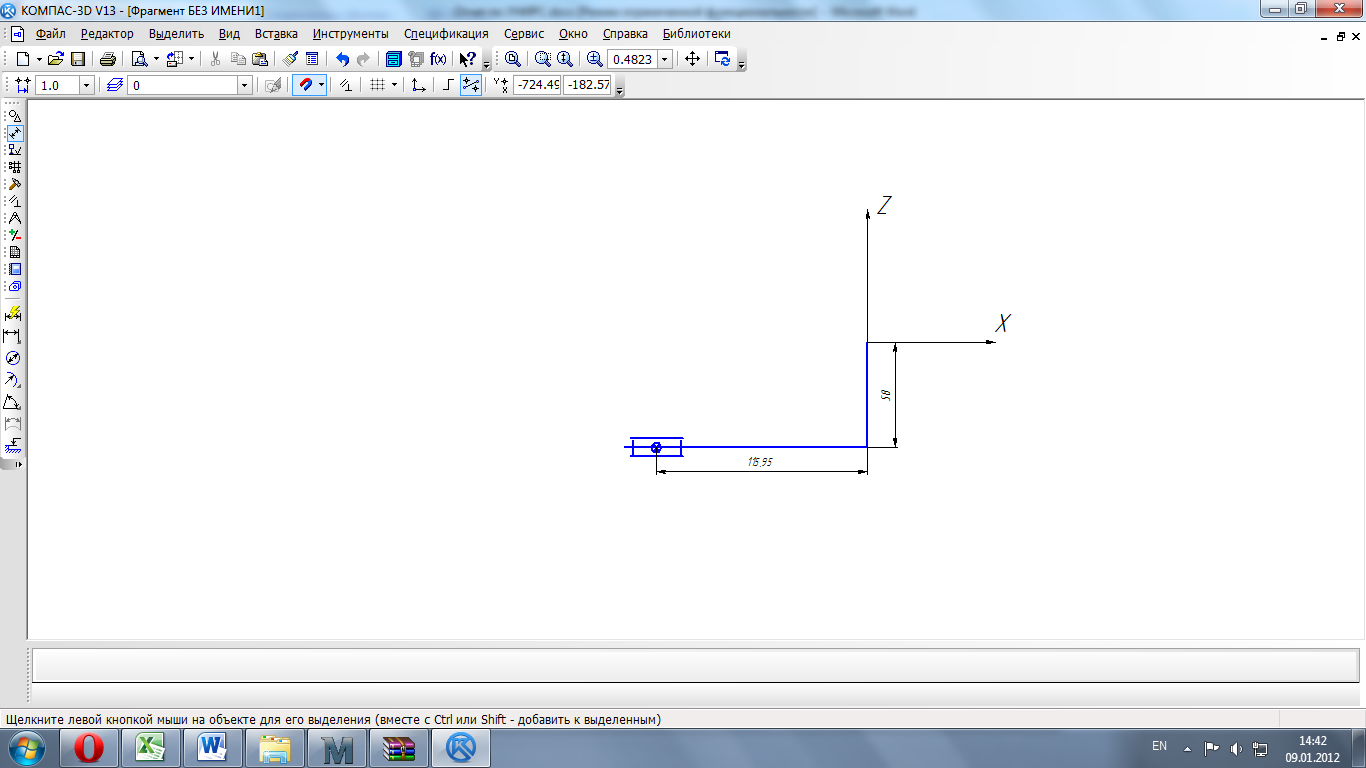
Получаем, что координаты схвата полученные по проекциям:
|
x |
y |
z |
|
116.5 |
-278,47 |
58 |
Полученные значения, высчитанные по матрицам:
|
x |
y |
z |
|
-115.498 |
-278.471 |
-57.551 |
Заключение
В процессе выполнения УНИРС разработана математическая модель манипулятора робота, ее реализация в программе MathCad, проведены исследования движения манипулятора с использованием системы автоматизированного проектирования Компас 3D
В результате проведения экспериментов были вычислены координаты центра схвата в зависимости от времени, построены диаграммы, и проекции манипулятора в положении k=0.4 при t=3.2c. и проведена проверка правильности решения графическим способом с помощью Компас 3D.
Библиографический список
1) Хомченко В.Г., Соломин В.Ю. / Исследование движения манипулятора промышленных роботов. / Омск 2007г.
2) Хомченко В.Г., Соломин В.Ю./мехатронные и робототехнические системы./Омск 2008г.