

Решение прямой и обратной задачи кинематики
В робототехнике, есть две основные задачи кинематики: прямая и обратная.
Прямая задача — это вычисление положения (Xp, Yp, Zp) рабочего органа манипулятора по его кинематической схеме и значениях обобщенных координат (q1,q2…qn) , где n — число степеней свободы манипулятора,q— обобщенные координаты.
Обратная задача — это вычисление величин обобщенных координат (q1,q2…qn) по заданному положению (Xp, Yp, Zp) рабочего органа при известной схеме кинематики манипулятора.
Таким образом, решение прямой задачи говорит о том, где будет находиться рабочий орган манипулятора, при заданных углах его суставов, а обратная задача — как нужно «вывернуться» манипулятору, чтобы его рабочий орган оказался в заданном положении.
Прямую и обратную задачи кинематики манипулятора будем решать геометрически. Кинематическая схема манипулятора, обобщенные координаты его звеньев qn, их длины lnизображены на рисунке 1.
Прямая задача. По заданным обобщенным координатам найти положение точки P схвата.
 ;
;
 ;
;
 .
.
Обратная задача. По заданному положению точки P схвата найти обобщенные координаты.
 );
);
 ;
;
 .
.
Исследование динамических свойств манипулятора
Составим расчетную схему (рис. 2) для построения динамической модели, с изображенными силами действия приводов, силами трения и обобщенными координатами.
Манипулятор представляет собой механизм с несколькими степенями свободы с голономными связями, потому воспользуемся уравнениями Лагранжа второго рода для составления уравнений движения.
Уравнения Лагранжа второго рода применительно к исследуемой манипуляционной системе примут вид
 . (1)
. (1)
Кинетическая энергия системы при неподвижном основании определится по формуле:
 (2)
(2)
где T1,T2,T3 — кинетические энергии звеньев 1, 2, 3 соответственно.
Составим расчетную схему для построения динамической модели, с изображенными силами действия приводов, силами трения и обобщенными координатами.

Рис. 2. Расчетная схема
Так как звено 1 совершает вращательное движение вокруг оси Z, то получаем:
 . (3)
. (3)
Звено 2 совершает пространственное поступательное движение по осям X, Y, Z, то получаем:
 .(4)
.(4)
Звено 3 совершает пространственное поступательное движение по осям X, Y, Z, то получаем:
 .(5)
.(5)
Подставляя результаты (3), (4) и (5), получаем
 .(6)
.(6)
Будем считать, что звенья имеют форму цилиндра. Момент инерции звена 1 вокруг неподвижной оси z:
 (7)
(7)
где r1-радиус сечения цилиндра звена 1
Момент инерции звена 2 вокруг неподвижной оси zскладывается из суммы моментов инерции частей c1, c2 и c3 и c4 (рис. 3). Учитывая, что масса звена распределена равномерно на каждом участке длины, уравнения для нахождения момента инерции частей звена 3 запишутся следующем образом:
 (8)
(8)
 (9)
(9)
где r2-радиус сечения цилиндра звена 2
 (10)
(10)
где d-расстояние между осью вращения и центром с3
 (11)
(11)
 (12)
(12)
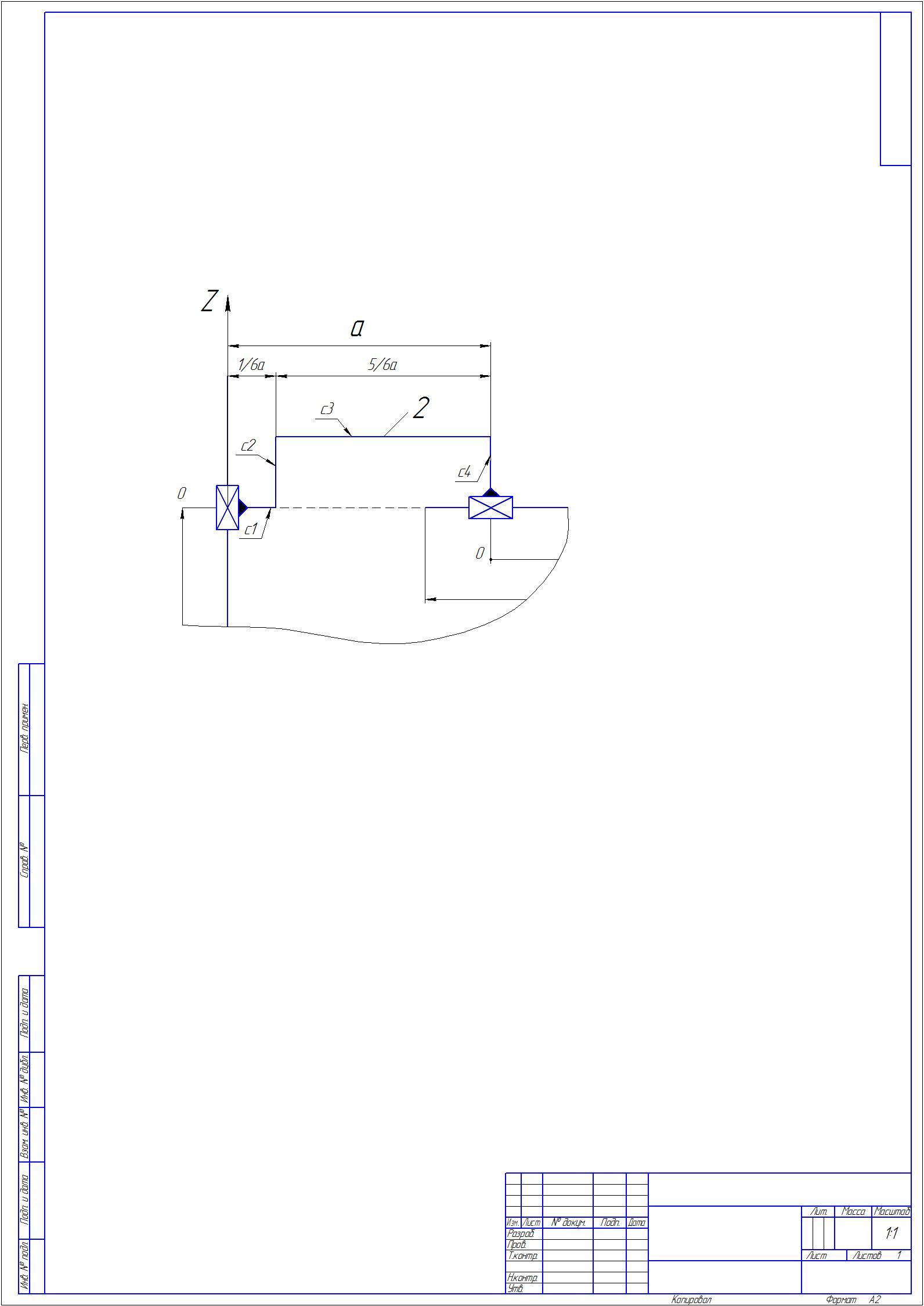
Рис.3. Звено 2 манипулятора
Момент инерции звена 3 вокруг неподвижной оси z:
 (13)
(13)
Для вычисления обобщенной силы Qi,
соответствующей обобщенной координатеqi,
поступают следующим образом: сообщают
системе такое виртуальное перемещение,
при котором изменяется только эта
координата qi,
а все остальные координаты остаются
неизменными, и вычисляют виртуальную
работу всех активных сил на этом
перемещении. Тогда множитель при вариации
δqiв
полученном выражении
виртуальной работы δАj=Qi δqi
и будет
обобщенной силой Qi
, т. е.
δqi
и будет
обобщенной силой Qi
, т. е.
 ;
(14)
;
(14)
Изобразим манипулятор в произвольный момент времени и сообщим системе такое виртуальное перемещение, при котором изменяется только обобщенная координата q1 (рис. 4), которая имеет приращение δq1.
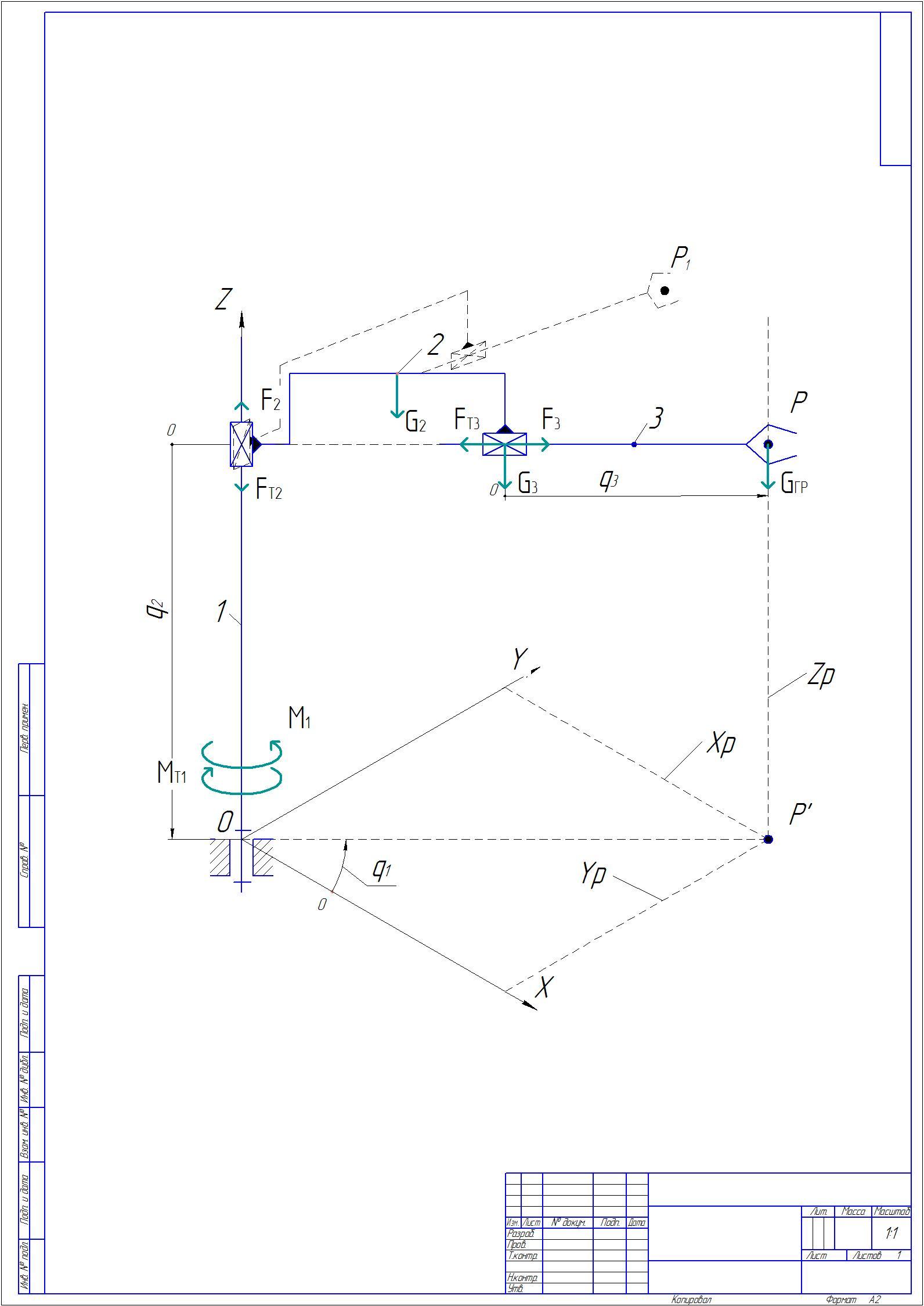
Рис. 4. Изменение обобщенной координаты q1
При этом точка P превратится вP1. Вычислим виртуальную работу всех активных сил на этом перемещении:
 ; (15)
; (15)
Множитель при вариации δq2 в полученном выражении виртуальной работы и будет обобщенной силой Q2:
 ; (16)
; (16)
Изобразим манипулятор в произвольный момент времени и сообщим системе такое виртуальное перемещение, при котором изменяется только обобщенная координата q2 (рис. 5), которая имеет приращение δq2.

Рис. 5. Изменение обобщенной координаты q2
При этом точка P превратится вP2. Вычислим виртуальную работу всех активных сил на этом перемещении:
 . (17)
. (17)
Множитель при вариации δq2 в полученном выражении виртуальной работы и будет обобщенной силой Q2:
 . (18)
. (18)
Изобразим манипулятор в произвольный момент времени и сообщим системе такое виртуальное перемещение, при котором изменяется только обобщенная координата q3 (рис. 6), которая имеет приращение δq3.
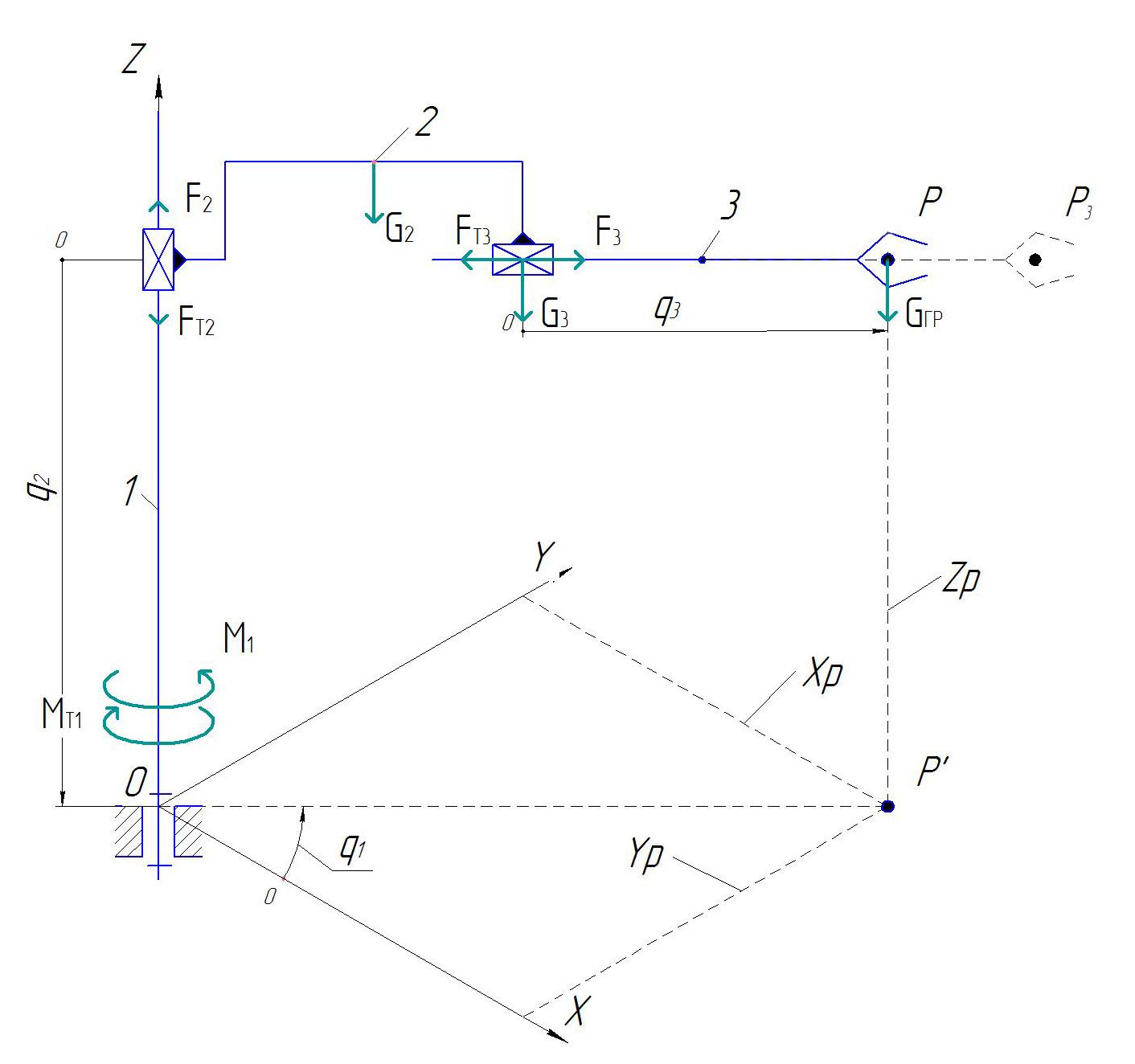
Рис. 6. Изменение обобщенной координаты q3
При этом точка P превратится вP3. Вычислим виртуальную работу всех активных сил на этом перемещении:
 ; (19)
; (19)
Множитель при вариации δq2 в полученном выражении виртуальной работы и будет обобщенной силой Q2:
 . (20) где
М1 — момент силы привода, действующий
на звено 1; МТ1 — момент сил трения,
действующий на звено 1; F3— сила
привода, действующая на звено 3; FТ3— сила трения при движении по осям звена
3;G2,G3,GГР— силы тяжести,
действующие соответственно на звено
2, 3 и груз.
. (20) где
М1 — момент силы привода, действующий
на звено 1; МТ1 — момент сил трения,
действующий на звено 1; F3— сила
привода, действующая на звено 3; FТ3— сила трения при движении по осям звена
3;G2,G3,GГР— силы тяжести,
действующие соответственно на звено
2, 3 и груз.
Определим частные производные от кинетической энергии по обобщенным координатам и обобщенным скоростям:
 ;
; ;
;
 ;
; ;(21)
;(21)
 ;
; .
.
Подставляя полученные значения в уравнения Лагранжа (1), получим:

 M1 −MТ1;
M1 −MТ1;
 =FТ2−F2−G2−G3; (22)
=FТ2−F2−G2−G3; (22)
 = F3−FТ3.
= F3−FТ3.
Если в задаче требуется найти движение системы, то интегрируют уравнения Лагранжа и определяют по начальным условиям произвольные постоянные интегрирования.
Если в задаче требуется найти неизвестные активные силы, то их определяют из уравнений Лагранжа.
Если в задаче требуется определить неизвестные реакции, то после нахождения из уравнений Лагранжа следует применить принцип освобождаемости к соответствующим телам системы и воспользоваться основным уравнением динамики, либо принципом Даламбера, либо общим уравнением динамики.