

Построение рабочей зоны манипулятора
Рабочее пространство промышленного робота — пространство, в котором может находиться мехатронное устройство.
Рабочая зона мехатронного устройства— пространство, в котором может находиться рабочий орган (например, рука) при функционированиимехатронного устройства.
Для построения рабочей зоны придадим перемещения по обобщённым координатам q1, q2, q3от крайних минимальных до крайних максимальных значений.
Если обобщённой координате q1придать фиксированное граничное значение 0° и обобщённой координате q2придать фиксированное граничное значение 600 мм, а обобщённую координату q3изменять в пределах от 150 мм до 400 мм, точка P рабочего органа опишет отрезок AB длиной 250 мм.
Если обобщённой координате q1придать фиксированное граничное значение 0° и обобщённой координате q3придать фиксированное граничное значение 400 мм, а обобщённую координату q2изменять в пределах от 350 мм до 600 мм, точка P рабочего органа опишет отрезок BC длиной 250 мм.
Если обобщённой координате q1придать фиксированное граничное значение 0° и обобщённой координате q2придать фиксированное граничное значение 350 мм, а обобщённую координату q3изменять в пределах от 150 мм до 400 мм, точка P рабочего органа опишет отрезок CD длиной 250 мм.
Если обобщённой координате q1придать фиксированное граничное значение 0° и обобщённой координате q3придать фиксированное граничное значение 150 мм, а обобщённую координату q2изменять в пределах от 350 мм до 600 мм, точка P рабочего органа опишет отрезок AD длиной 250 мм.
Если обобщённой координате q2придать фиксированное значение 600 мм и координате q3фиксированное значение 150 мм, а координату q1изменять в пределах от 0° до 270°, то точка P рабочего органа опишет дугу радиусом 550 мм вокруг оси Z.
Если обобщённой координате q2придать фиксированное значение 600 мм и координате q3фиксированное значение 400 мм, а координату q1изменять в пределах от 0° до 270°, то точка P рабочего органа опишет дугу радиусом 800 мм вокруг оси Z.
Если обобщённой координате q2придать фиксированное значение 350 мм и координате q3фиксированное значение 400 мм, а координату q1изменять в пределах от 0° до 270°, то точка P рабочего органа опишет дугу радиусом 800 мм вокруг оси Z.
Если обобщённой координате q2придать фиксированное значение 350 мм и координате q3фиксированное значение 150 мм, а координату q1изменять в пределах от 0° до 270°, то точка P рабочего органа опишет дугу радиусом 550 мм вокруг оси Z.
Полученная фигура имеет сложную форму. Рабочая зона манипулятора ограничивается большим и малым цилиндрами радиусами 550 мм и 800 мм, двумя параллельными плоскостями, отстающими от плоскости XY на 550 мм и 800 мм и сектором в 270°.
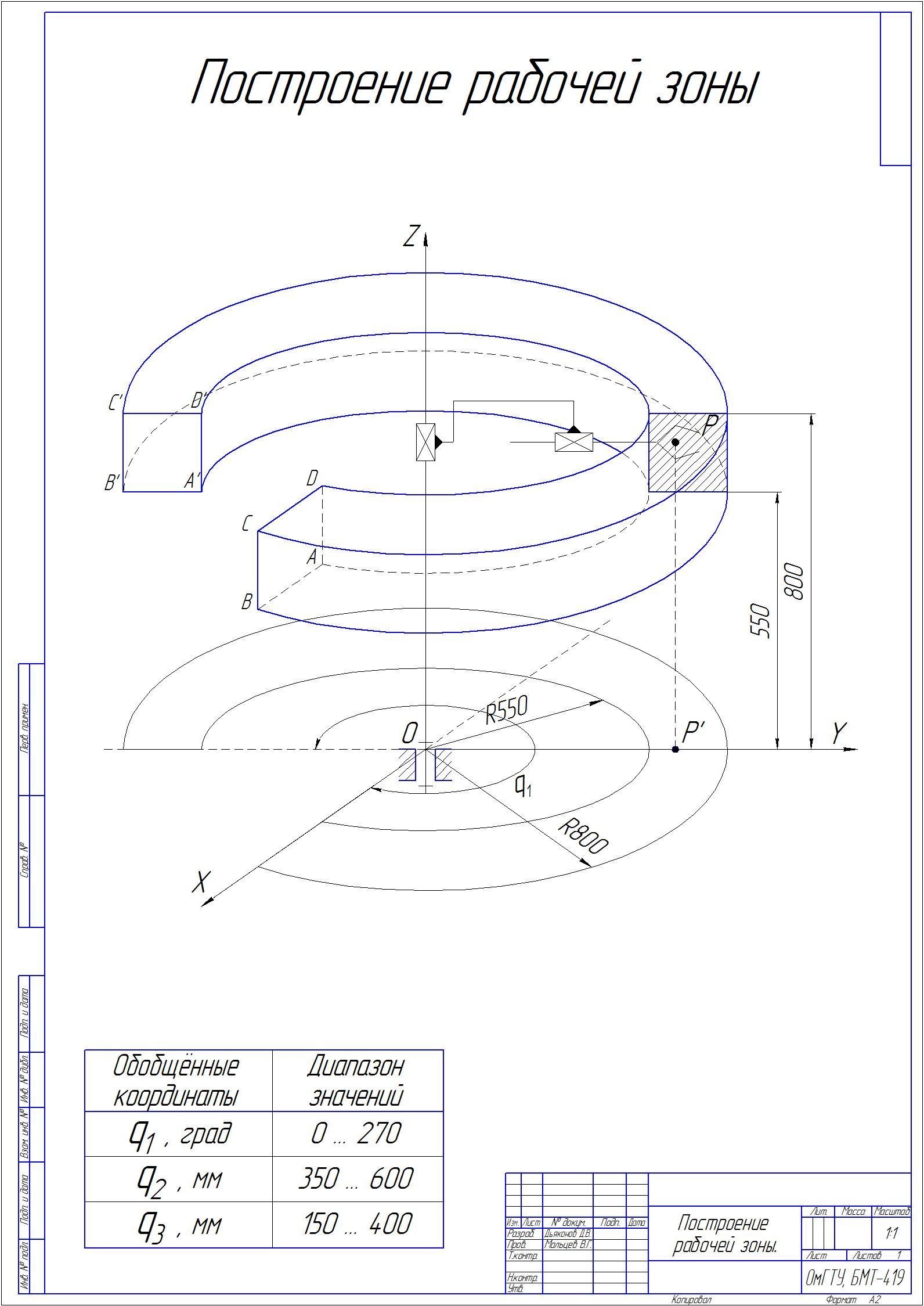
Рис.7 Рабочая зона манипулятора
Заключение
В ходе курсового проектирования был проведен динамический анализ манипулятора. Построена и описана рабочая зона манипулятора. Решены прямая и обратная задачи о положении объекта манипулирования. Данные задачи были решены с помощью уравнения Лагранжа второго рода.
Библиографический список
Тарг С. М. Краткий курс теоретической механики. – М.: Высшая школа, 1986.-416с.:ил.
Манипуляционные системы роботов /А. И. Корендясев, Б. Л. Саламандра, Л. И. Тывес и др.; Под общ. Ред. А. И. Корендясева. – М.: Машиностроение, 1989.-472 с.: ил.
Левитинский Н. И. Теория механизмов и машин. – М.: Наука, 1990.-592 с.: ил.
Козырев Ю.Г. Промышленные роботы: Справочник. - М.: Машиностроение, 1983.
Мальцев В.Г. Динамический анализ манипуляторов промышленных роботов. – Омск: Изд-во ОмГТУ, 1998. - 20 с.