Решение прямой и обратной задачи кинематики манипулятора
Прямая и обратная задача кинематики
В робототехнике, есть две основные задачи кинематики: прямая и обратная.
Прямая задача – это вычисление положения (Xp, Yp, Zp) рабочего органа манипулятора по его кинематической схеме и значениях обобщенных координат (q1, q2… qn) , где n – число степеней свободы манипулятора, q– обобщенные координаты.
Обратная задача – это вычисление величин обобщенных координат (q1, q2… qn) по заданному положению (Xp, Yp, Zp) рабочего органа при известной схеме кинематики манипулятора.
Таким образом, решение прямой задачи говорит о том, где будет находиться рабочий орган манипулятора, при заданных углах его суставов, а обратная задача – как нужно «вывернуться» манипулятору, чтобы его рабочий орган оказался в заданном положении.
Решение прямой и обратной задачи кинематики для исходной кинематической схемы
Прямую и обратную задачи кинематики манипулятора будем решать геометрически, для этого изобразим кинематическую схему манипулятора, обобщенные координаты его звеньев qn, их длины ln и привяжем к манипулятору систему координат X,Y,Z, обозначив координаты рабочего органа Xp, Yp, Zp (рис.1).
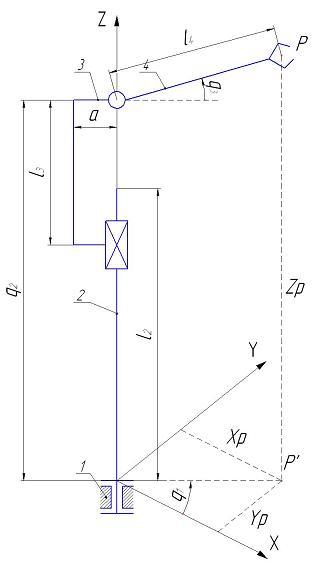
Рис.1. Кинематическая схема манипулятора
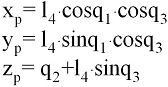
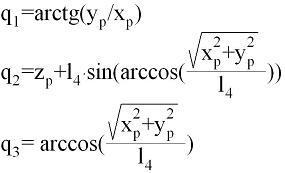
Прямая задача. По заданным обобщенным координатам найти положение точки P схвата.
Обратная задача. По заданному положению точки P схвата найти обобщенные координаты.
2. Решение прямой и обратной задачи динамики манипулятора
2.1. Составление уравнений Лагранжа
Для механизмов с несколькими степенями свободы при голономных связях уравнения их движения составляют обычно в форме уравнений Лагранжа второго рода.
Применительно к исследуемой манипуляционной системе примут вид:
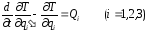 ,
(1)
,
(1)
где Т - кинетическая энергия системы; qi',- обобщенные скорости; qi - обобщенные координаты; Qi - обобщенные силы; i - число обобщенных координат; q1 = φ1; q2 = S1; q3 = φ2.
Составим расчетную схему для построения динамической модели, с изображенными силами действия приводов, силами трения, обобщенными координатами и системой координат, привязанной к кинематической схеме (рис. 2).
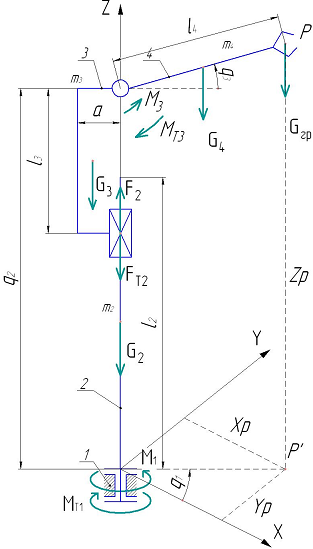
Рис. 2. Динамическая схема манипулятора
2.2. Расчет кинетической энергии звеньев
Кинетическая энергия твердого тела в частных случаях находится с помощью данных формул:
при поступательном движении:
 ,
(2)
,
(2)
где М – масса твердого тела; ν – скорость поступательного движения;
при вращении вокруг неподвижной оси:
 ,
(3)
,
(3)
где Iz – момент инерции вокруг неподвижной оси; 𝜔 – угловая скорость тела;
при плоскопараллельном движении:
 ,
(4)
,
(4)
где νс – скорость центра тяжести тела; Iс – центр инерции тела относительно оси, проходящей через центр масс тела параллельно мгновенной оси вращения;
при пространственном движении
 (5)
(5)
Кинетическая энергия исходной системы определится по формуле:
 ,
(6)
,
(6)
где
 –
кинетическая энергия звена 2, совершающего
вращательное движение;
–
кинетическая энергия звена 2, совершающего
вращательное движение;
 ;
(7)
;
(7)
 –
кинетическая
энергия звена 3, совершающего
пространственное движение;
–
кинетическая
энергия звена 3, совершающего
пространственное движение;
 ;
(8)
;
(8)
 –
кинетическая
энергия звена 4, совершающего
пространственное движение;
–
кинетическая
энергия звена 4, совершающего
пространственное движение;
 ;
(9)
;
(9)
Таким
образом уравнение для нахождения
кинетической энергии системы примет
вид: (10)
(10)
Определим частные производные от кинетической энергии по обобщенным координатам и обобщенным скоростям:


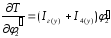 (11)
(11)