

3. Построение рабочей зоны мехатронного устройства
3.1. Рабочая зона мехатронного устройства
Рабочее пространство промышленного робота – пространство, в котором может находиться мехатронное устройство.
Рабочая зона мехатронного устройства – это пространство, в котором находится его рабочий орган (например рука) при всех возможных положениях звеньев. Форма рабочей зоны зависит от числа степеней подвижности манипулятора и используемой системы координат, в которой осуществляется движение рабочего органа. В промышленном роботе используются прямоугольная, цилиндрическая, сферическая, угловая системы координат и их комбинации.
Рабочая зона ограничивается сложной поверхностью огибающая все возможные положения. Рабочая зона оценивается объёмом формы, которые определяют функциональные возможности манипулятора. Знание границ рабочей зоны необходимо для сравнительной оценки двигательных возможностей различных конечностей манипулятора.
Для выявления рабочей зоны необходимо:
Структурная компоновка схемы, то есть число, взаимно расположенных степеней подвижности.
Ограничение на перемещение по степеням подвижности.
Геометрические размеры звеньев кинематической цепи манипулятора.
Последовательность построения рабочей зоны исследуемого мехатронного устройства
Если обобщенной координате q3 придать фиксированное значение q3=0, а обобщенную координату q2 изменять в пределах от минимального до максимального значений (от 450 до 1050), то мы получим границу PA.
Если обобщенной координате q2 придать фиксированное максимальное значение (1050), а обобщенную координату q3 изменять в пределах от максимального до минимального значений (от -45 до 90), то мы получим границу CD.
Если обобщенной координате q2 придать фиксированное минимальное значение (450), а обобщенную координату q3 изменять в пределах от максимального до минимального значений (от -45 до 90), то мы получим границу BE.
Если обобщенной координате q3 придать фиксированное максимальное значение (90), а обобщенную координату q2 изменять в пределах от минимального до максимального значений (от 450 до 1050), то мы получим границу CB.
Если обобщенной координате q3 придать фиксированное минимальное значение (-45), а обобщенную координату q2 изменять в пределах от минимального до максимального значений (от 450 до 1050), то мы получим границу DE.
Форма рабочей зоны примет вид, показанный на рис. 8 и рис. 9.
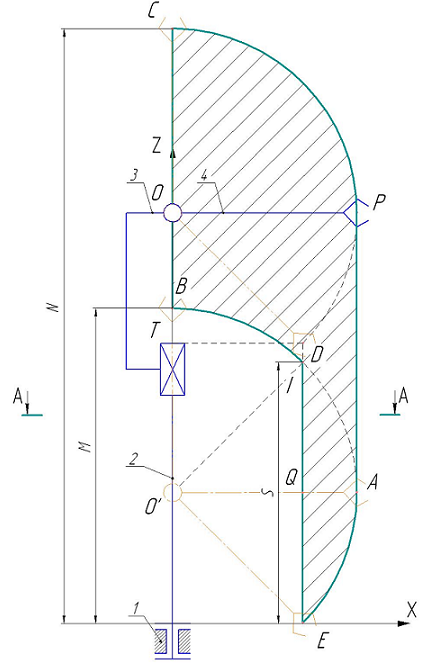
Рис. 8. Рабочая зона манипулятора (вид на плоскости ZX)

Рис. 9. Рабочая зона манипулятора (сечение A–A)
Определим координаты N,M,S,V,H характерных точек рабочей зоны манипулятора:



Длину H найдем из равнобедренного прямоугольного треугольника ΔOTD:




Длину IQ найдем из прямоугольного треугольника ΔO'IQ:



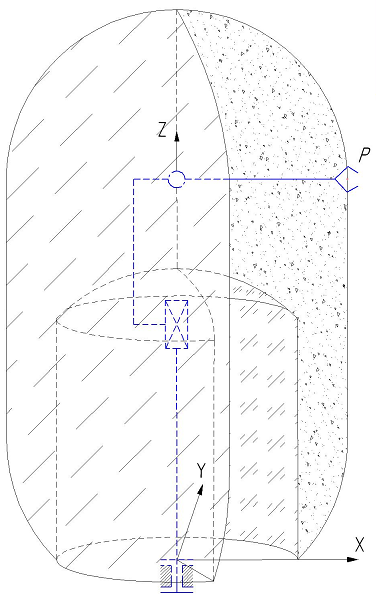
Рис. 10. Рабочая зона манипулятора (пространственный вид)
Заключение
В выполненной выпускной работе были проведены следующие работы:
1) Разработано мехатронное устройство с двумя вращательными и одной поступательной кинетическими парами, обладающее следующими показателями назначения:
- масса, кг: 150;
- число степеней подвижности: 3;
- скорости линейных перемещений звеньев системы, м/с: 0,3;
- скорости угловых перемещений звеньев системы, ˚/с: 15;
- время разгона/торможения линейного перемещения, с: 0,7;
- время разгона/торможения углового перемещения, с: 0,7;
- полная масса 2 звена m1, кг: 60;
- полная масса 3 звена m2, кг: 40;
- полная масса 4 звена m3, кг: 50;
- грузоподъемность mг, кг: 20;
- напряжение питания трехфазное, В: ~380;
- рабочий диапазон температур , °С: 0-60;
- система управления: на базе промышленной станции;
- тип системы управления: контурная;
2) Проведены исследования механических свойств разрабатываемого мехатронного устройства;