

2.3. Расчет моментов инерции звеньев
Выражая момент инерции для каждого звена, его диаметром можно пренебречь, тогда выражения запишутся в следующем виде:
Момент инерции звена 2 вокруг неподвижной оси z:
 (12)
(12)
Момент инерции звена 3 вокруг неподвижной оси z складывается из суммы моментов инерции части Ч1, Ч2 и Ч3 (рис. 3). Пренебрегая диаметром частей звена и учитывая, что масса звена распределена равномерно на каждом участке длины, уравнения для нахождения момента инерции частей звена 3 запишутся следующем образом:
 ,
(13)
,
(13)
 ,
(14)
,
(14)
 .
(15)
.
(15)
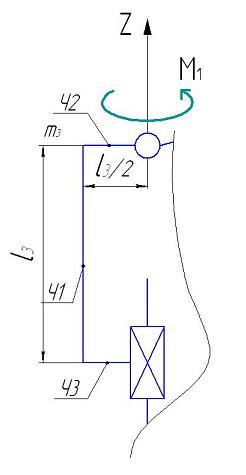
Рис.3. Звено 3 манипулятора
Звено 4 может совершать вращательные движения вокруг нескольких осей (рис. 4). Запишем уравнения для каждого случая.
Звено 4 вращается относительно оси Z. Тогда уравнение для момента инерции будет иметь вид:
 .
(16)
.
(16)
Звено 4 вращается относительно оси Y. В этом случае момент инерции запишется как:
 .
(17)
.
(17)
Груз может совершать вращательные движения вокруг нескольких осей (рис. 4). Запишем уравнения для каждого случая.
Груз вращается относительно оси Z. Тогда уравнение для момента инерции будет иметь вид:
 .
(18)
.
(18)
Груз вращается относительно оси Y. В этом случае момент инерции запишется как:
 .
(19)
.
(19)
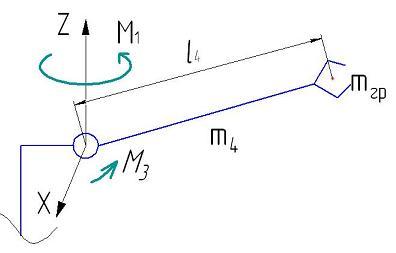
Рис. 4. Звено 4 манипулятора
Перепишем систему уравнений 11,расписав момент инерции:


 (20)
(20)

2.4. Вычисление обобщенных сил
Для
вычисления обобщенной силы Qi,
соответствующей обобщенной координате
qi,
поступают следующим образом: сообщают
системе такое виртуальное перемещение,
при котором изменяется только эта
координата qi,
а все остальные координаты остаются
неизменными, и вычисляют виртуальную
работу всех активных сил
на этом перемещении. Тогда множитель
при вариации δqi
в полученном выражении
виртуальной работы δАj
=
Qi δqi
и
будет обобщенной силой Qi
,
т. е.
δqi
и
будет обобщенной силой Qi
,
т. е.
 .
(21)
.
(21)
Изобразим манипулятор в произвольный момент времени и сообщим системе такое виртуальное перемещение, при котором изменяется только обобщенная координата q1 (рис. 5), q2= q21, q3= q31, q1 имеет приращение δq1.
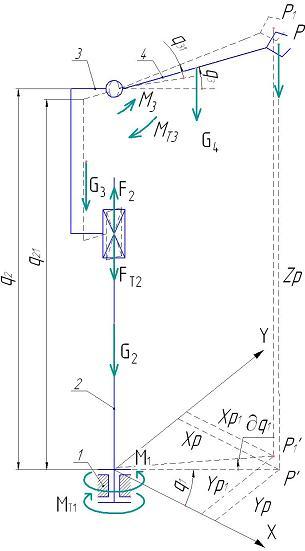
Рис. 5. Изменение обобщенной координаты q1
При этом точка P превратится в P1, точка P' превратится в P1'. Вычислим виртуальную работу всех активных сил на этом перемещении:
 .
(22)
.
(22)
Множитель при вариации δq1 в полученном выражении виртуальной работы и будет обобщенной силой Q1 :
 .
(23)
.
(23)
Изобразим манипулятор в произвольный момент времени и сообщим системе такое виртуальное перемещение, при котором изменяется только обобщенная координата q2 (рис. 6), q3= q31, q2 имеет приращение δq2.
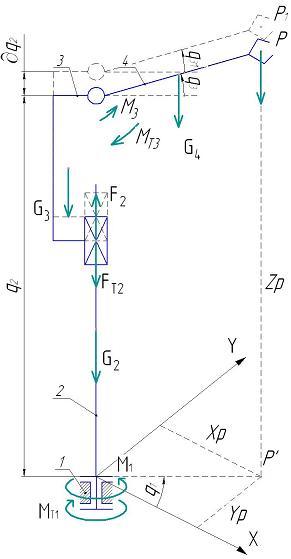
Рис. 6. Изменение обобщенной координаты q2
При этом точка P превратится в P1. Вычислим виртуальную работу всех активных сил на этом перемещении:
 .
(24)
.
(24)
Множитель при вариации δq2 в полученном выражении виртуальной работы и будет обобщенной силой Q2 :
 .
(25)
.
(25)
Изобразим манипулятор в произвольный момент времени и сообщим системе такое виртуальное перемещение, при котором изменяется только обобщенная координата q3 (рис. 7), имея приращение δq3.
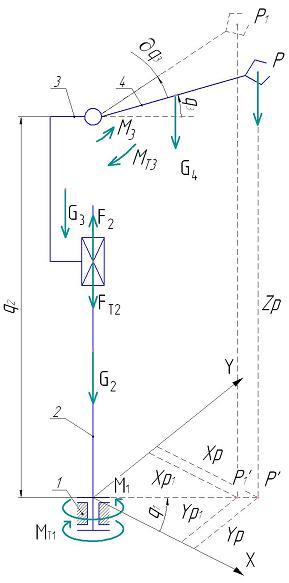
Рис. 7. Изменение обобщенной координаты q3
При этом точка P превратится в P1, точка P' превратится в P1'. Вычислим виртуальную работу всех активных сил на этом перемещении:
 .
(26)
.
(26)
Множитель при вариации δq3 в полученном выражении виртуальной работы и будет обобщенной силой Q3 :
 ,
(27)
,
(27)
где M1 – крутящий момент привода, действующий на звено 2;
MТ1 – момент трения при вращении звена 2;
M3 – крутящий момент привода, действующий на звено 4;
MТ3 – момент трения при вращении звена 4;
G2 – сила тяжести, действующая на звено 2;
G3 – сила тяжести, действующая на звено 3;
G4 – сила тяжести, действующая на звено 4;
Gгр – сила тяжести, действующая на груз;
F2 – сила привода, действующая на звено 3;
FТ2 – сила трения, действующая при движении звена 3.
Подставляя полученные значения в уравнения Лагранжа, получим:

 =
M1
– MТ1;
=
M1
– MТ1;
 =
F2
– FТ2–
G3
– G4
– Gгр;
(28)
=
F2
– FТ2–
G3
– G4
– Gгр;
(28)
 =
=
 .
.
Если в задаче требуется найти движение системы, то интегрируют составленные уравнения Лагранжа и определяют по начальным условиям произвольные постоянные интегрирования.
Если в задаче требуется найти неизвестные активные силы, то определяют их непосредственно из уравнений Лагранжа.
Если и задаче требуется определить неизвестные реакции, то после нахождения из уравнений Лагранжа ускорений следует применить принцип освобождаемости к соответствующим телам системы и воспользоваться основным уравнением динамики, либо принципом Даламбера, либо общим уравнением динамики.