

Задача 2.2
На рис. 14 приведена структурная схема контура регулирования объекта, реализующая пропорциональный (П) закон регулирования. В схеме используется релейное звено и исполнительный механизм постоянной скорости.
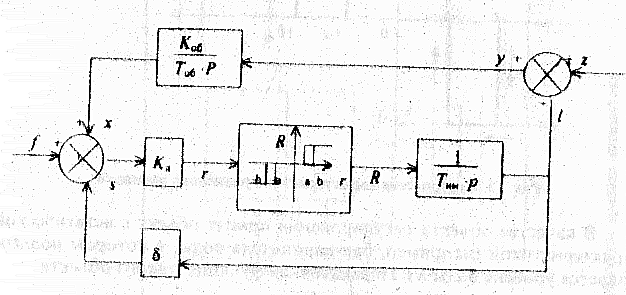
Рис. 14. Структурная схема контура регулирования объекта, реализующая П-закон:
f – параметр, определяющий величину задания регулируемого параметра (x0 = f); x – регулируемый параметр (например, уровень воды в баке); z – параметр, определяющий величину неуправляемого возмущающего воздействия на объект (например, расход воды, потребляемой из бака); l – перемещение регулирующего органа (исполнительного механизма), определяющее величину регулирующего воздействия на объект (например, расход доливаемой воды в бак); y = z l – суммарное возмущающее воздействие на объект; m = l – параметр, определяющий величину сигнала, формируемого функциональной обратной связью ( = 1/Кр – диапазон пропорциональности регулятора, Кр – коэффициент передачи регулятора); s = x f m параметр, определяющий величину сигнала рассогласования (сигнала ошибки); r = Кл s – параметр, определяющий величину сигнала, управляющего релейным звеном регулятора (Кл – коэффициент усиления линейного звена регулятора); R – параметр, определяющий сигнал на выходе релейного звена, может принимать значения R = +1; R = 1; R = 0.
Релейное звено, используемое в схеме, реализует статическую характеристику, представленную на рис. 15. Включение реле происходит при значениях R = +b и R = b, отключение – при значениях R= +a, R = a.
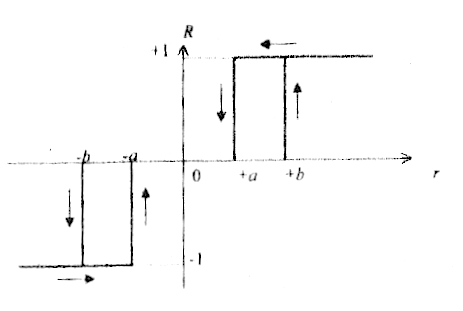
Рис. 15. Статическая характеристика релейного элемента
В качестве объекта регулирования принят объект с астатической характеристикой (например, бак-накопитель воды, в котором поддерживается уровень воды X). Передаточная функция такого объекта
Wоб(р)
=
![]() =
=
![]() ,
,
где Kоб – коэффициент усиления объекта; Tоб – постоянная времени объекта.
В качестве исполнительного механизма в схеме используется механизм постоянной скорости (например, типа МЭО). Передаточная функция этого звена
![]() =
=
![]() =
=
![]() ,
,
где Ти.м – время перемещения механизма от L = 0 до L = 100 % ХРО.
На рис. 16 представлена принципиальная электрическая схема технических средств автоматики, реализующих П-закон регулирования в соответствии со структурной схемой рис. 14.
Определите, какую функцию выполняет в схеме регулирования устройство, обозначенное на принципиальной схеме буквенным индек-сом, приведенным в табл. 2 для Вашего варианта задания.
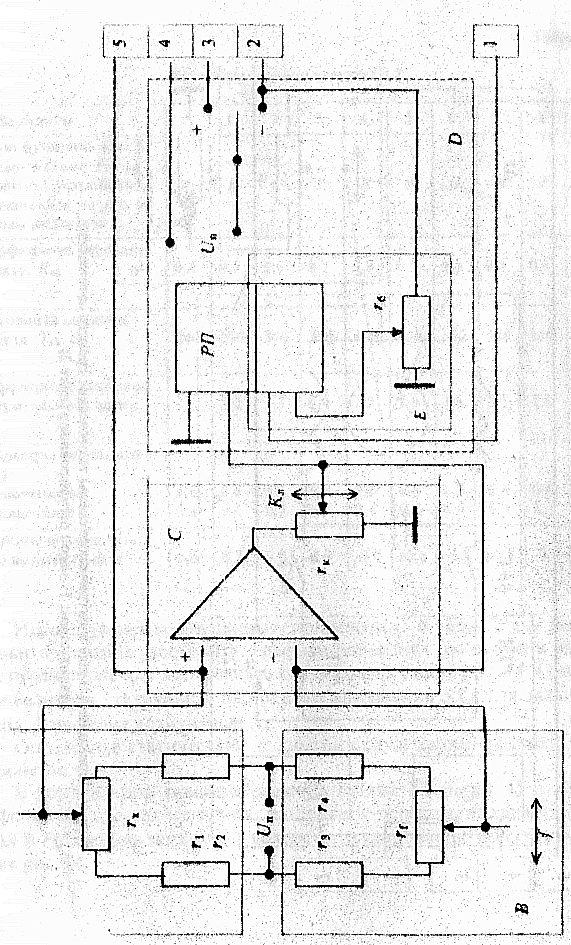
Рис.. 16. Принципиальные электрические схемы средств автоматики, реализующих П-закон регулирования (лист 1)
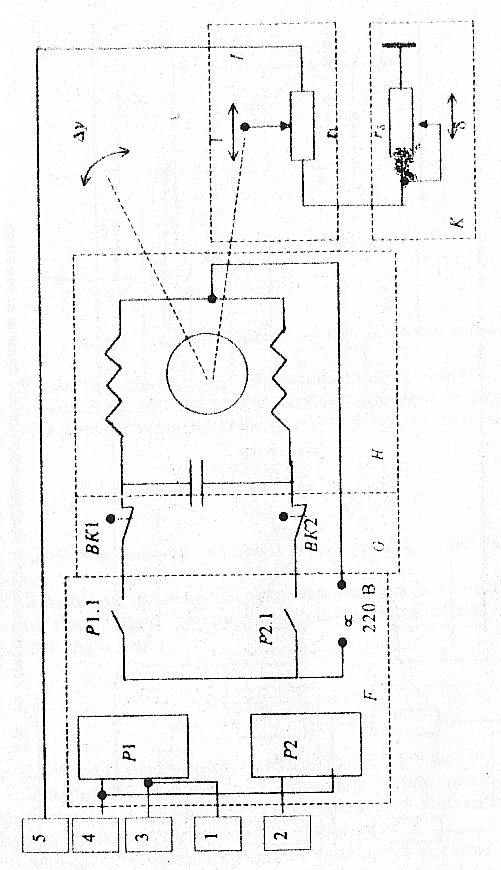
Рис.. 16. Принципиальные электрические схемы средств автоматики, реализующих П-закон регулирования (лист 1)
Таблица 2