

Контрольный пример решения задачи 2.1
Н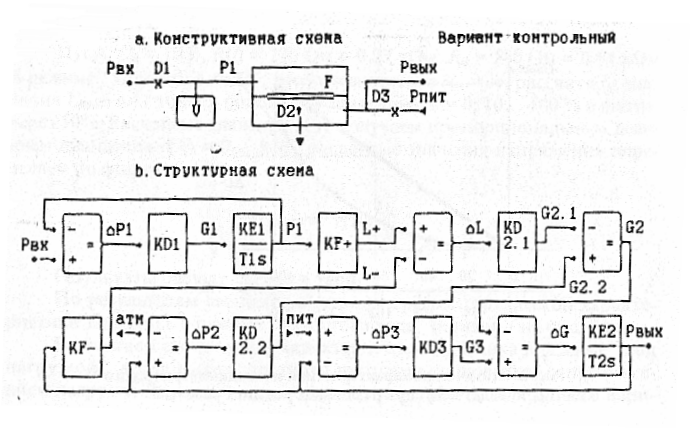 а
рис. 3 приведены конструктивная (а)
и структурная (б) схемы модуля.
Производим поэтапную свертку модуля с
целью определения его статической и
динамической характеристик.
а
рис. 3 приведены конструктивная (а)
и структурная (б) схемы модуля.
Производим поэтапную свертку модуля с
целью определения его статической и
динамической характеристик.
Рис. 3. Схема модуля
1-й этап. Определяем передаточную функцию “глухой” камеры, построенной на пневмосопротивлении D1 и пневмоемкости V(E1),
W1
=
![]() =
=
![]() .
.
![]()
Преобразуем функцию к стандартному виду
W1
=
![]() =
=
![]() ,
,
где
Т3 =
![]() .
.
2-й этап. Определяем передаточную функцию преобразователя перемещения L жесткого центра мембраны F в давление Pвых, построенного на “проточной” камере E2 (на конструктивной схеме камера значком V не обозначена, так как имеет пренебрежительно малый объем) и пневмосопротивлениях D2 (переменное) и D3 (постоянное)
W2
=
![]() =
=
![]() .
.
Преобразуем функцию к стандартному виду
W2
=
![]() =
=
![]() ,
,
так как KD2.2 = KD3 (при изменении давления Pвых приток воздуха G3 через D3 изменится так же, как сброс G2.2 через D2). Малый объем камеры E2 позволяет пренебречь инерционностью звена (Т2<<T1), тогда
W2 = KD2.1 KE2.
3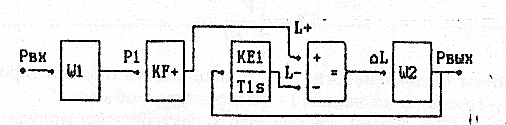 -й
этап. Определяем передаточную функцию
модуля. Структурная схема “б”
модуля преобразована к виду (ðèñ.
4):
-й
этап. Определяем передаточную функцию
модуля. Структурная схема “б”
модуля преобразована к виду (ðèñ.
4):
-
Рис. 4 Структурная схема модуля
Передаточная функция модуля
![]()
W3
= W
![]() =
=
![]() .
.
Преобразуем функцию к стандартному виду
W3
=
![]() =
=
![]() ,
,
так как KF KD2.1 KE2 1.
Таким образом, представленный на рисунке модуль реализует инерционное звено первого порядка с коэффициентом передачи, равным 1.
4-й этап. Определяем уравнение динамики модуля. Применив обратное преобразование к передаточной функции W3, получим уравнение динамики модуля в дифференциальной форме
![]() =
=
![]() ,
,
где
Т3 =
![]() .
.
Передаточная функция пневмоемкости V
![]() =
=
![]() (формула
(21) в [1]).
(формула
(21) в [1]).
Передаточная функция пневмосопротивления D1
![]() =
1
(формула (17) в [1]).
=
1
(формула (17) в [1]).
Постоянная времени модуля принимает вид
T3
=
![]() ,
,
где V объем пневмоемкости; 1 – проводимость пневмосопротивления D1; R – газовая постоянная; t – температура в объеме V.
5-й этап. Определяем статическую характеристику модуля. В статике dPвых/dt = 0, тогда уравнение динамики преобразуется в уравнение статики Рвых = Рвх. Таким образом, в статике модуль реализует операцию повторения сигнала.
Контрольный пример решения задачи 2.2
Характеристики звеньев (обозначения переменных см. на рис. 14):
1. y = z 1.
2.
Òîá
![]() = Êîá
y,
x
=
= Êîá
y,
x
=
![]() õn
=
õn
=
![]() .
.
3. s = õ m f, m = l.
4. r = Kë s.
5. r = +b или r = b точки включения реле R = +1 или R = 1. r = + или r = точки включения реле R = 0.
6.
Òèì
![]() =
=
![]() ,
l
=
,
l
=
![]() ,
ln
=
,
ln
=
![]() + l.
+ l.
7.
=
![]() ,
где Кр -
коэффициент усиления регулятора.
,
где Кр -
коэффициент усиления регулятора.
формулы для расчета числовых значений переменных в контрольные моменты времени (рис. 5).
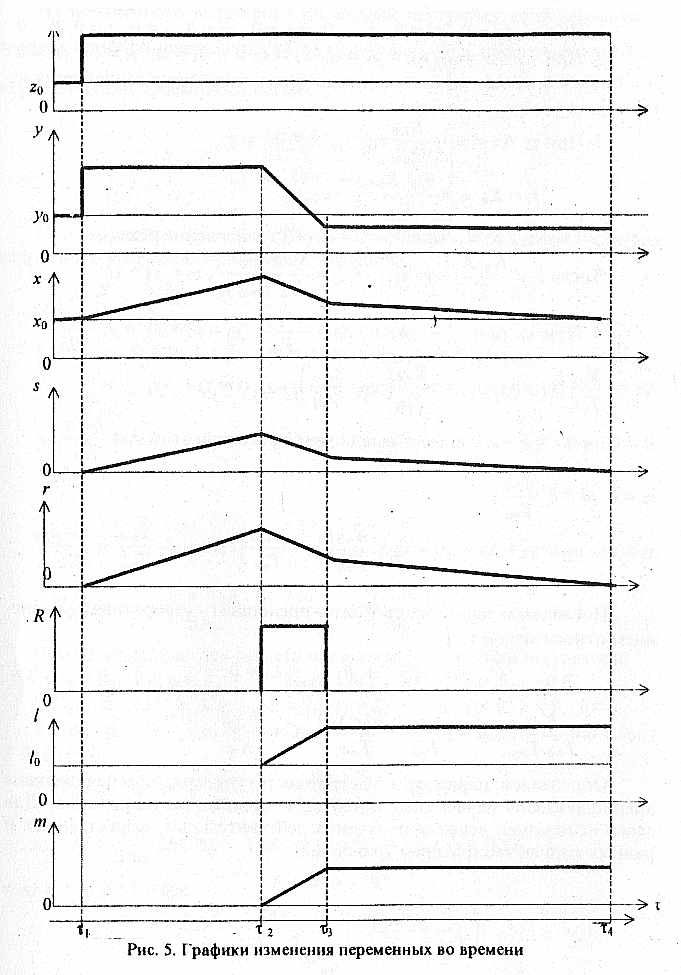
1. При 0 z = 0, l = 0, y = 0, x = 0, m = 0, s = 0, r = 0, R = 0.
2. При 1 z = d, y = y1 = d, x1 = x0 = f, l1 = l0, s1 = 0, m1 = 0, r1 = 0, R1 = 0, где d исходное значение возмущающего воздействия из табл. 2.
3.
При 2
x
= õ1
=
![]() y1,
s2 =
x
= x2,
r2
= Kë
s2
=
y1,
s2 =
x
= x2,
r2
= Kë
s2
=
![]() ,
,
где 12 = 1 2, R2 = 1 при r2 = b момент включения реле.
Тогда
b =
![]() y1
y1
![]() ,
,
![]() =
=
![]() ,
2
= 1
+ 12.
,
2
= 1
+ 12.
4.
При 3
l
=
![]() y
= l
=
y
= l
= ![]() ó3
= ó2
+ y
= ó1
ó3
= ó2
+ y
= ó1
![]() ,
,
x
=
![]() =
=
![]() ,
õ3 =
õ2 +
x,
,
õ3 =
õ2 +
x,
R
= 0 при r
= b
à
момент включения реле, при этом s3
=
![]() ,
,
m
=
l
=
![]()
s3
= õ3
m3 =
õ2 +
x
m3 =
õ2 +
![]()
![]()
![]() .
.
Последнюю
зависимость можно представить квадратным
уравнением относительно ![]()
![]() +
+
![]() + C = 0
+ C = 0
где
À =
![]() ,
 =
,
 =
![]() Ñ =
Ñ =
![]() .
.
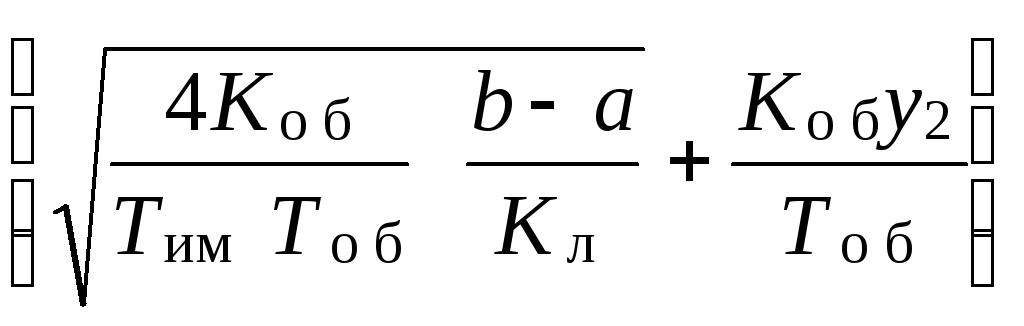
Определяем параметры настройки регулятора, обеспечивающие апериодический переходный процесс в системе регулирования. Для этого используем условие получения действительных, вещественных и равных корней квадратного уравнения
![]()
4АС = 0
4АС = 0
![]() =
=
![]()
![]() .
.
Из
полученного выражения определим
настройку коэффициента (предела
пропорциональности регулятора)
=
![]() ,
обеспечивающую апериодический переходный
процесс,
,
обеспечивающую апериодический переходный
процесс,
=
Òèì
 .
.
При
выполнении условия
![]()
4АС = 0 числовые значения
корней квадратного уравнения принимают
значения:
4АС = 0 числовые значения
корней квадратного уравнения принимают
значения:
23
=
![]() =
=
![]() .
.
5. При 4 l = 0, l4 = l3, m = 0, m4 = m3, ó = 0, ó4 = ó3,
õ =
![]() ,
õ4
= õ3
+ õ,
s
= õ
=
,
õ4
= õ3
+ õ,
s
= õ
=
![]()
r = Kë s = b a при R = +1,
![]() =
=
![]() ,
,
![]() =
=
![]() .
.
6. При
5
![]() =
=
![]() ,
l
=
,
l
=
![]() .
.
Исходные данные для расчета параметров настройки регулятора:
z = 0,6; a = 0,4; b = 0,8; Kл = 1,5; Тим = 120 с ; Тоб = 170 с; Kоб = 0,6.
1. При 0 : z = 0, l = 0, ó = 0, õ = 0, m = 0, s = 0, r = 0, R= 0.
2. При 1 : z = 0,6, ó = ó1 = 0,6. õ1 = õ0, l1 = l0, s1 = 0, m1 = 0, z1 = 0, R1 = 0.
3.
При 2
: 1-2
=
![]() =
=
![]()
õ2
= õ
=
![]() = 1,48
0,36 = 0,53; s2
= s
= 0,53;
= 1,48
0,36 = 0,53; s2
= s
= 0,53;
r2 = r = 1,5 0,53 = 0,8.
4.
3
:
= 120
![]() =
0,92,
=
0,92,
23
=
![]() = 94,3 ñ,
= 94,3 ñ,
l3
= l
=
![]() = 0,79; ó
= l;
ó3
= 0,6
0,79 = 0,19;
= 0,79; ó
= l;
ó3
= 0,6
0,79 = 0,19;
õ
=
![]() =
0,063;
õ3
= 0,53
0,063 = 0,467,
=
0,063;
õ3
= 0,53
0,063 = 0,467,
m = m3 = 0,92 0,79 = 0,73, s = 0,467 0,73 = 0,263;
s3 = 0,53 0,263 = 0,267; r3 = 1,5 0,267 = 0,4.
5. Ïðè 4 1 = 0, 14 = l3 = 0,79. m = 0, m4 = m3 = 0,73.
ó = 0, ó4 = ó3 = 0,19,
34
=
![]() = 397 ñ, õ
=
= 397 ñ, õ
=
![]() = 0,267.
= 0,267.
Примечание. Если y3 приняла отрицательное значение, то при расчете 34 следует взять это значение по модулю.
õ4 = 0,467 0,267 = 0,2, s = 0,267, s4 = 0, r4 = Êë s4 = 0, так как s4 = 0, и сигнал рассогласования на входе регулятора в момент времени 4 = s4 = 0, то на этом расчет заканчивается.