xT , yT – координаты точки M0' встречи толкателя с точкой на про-
филе кулачка;
e, Rmin – соответственно эксцентриситет и минимальный радиус кулачка;
K , K1 , K2 m, n, M0' – точки построения схемы механизма. В дальнейшем будем считать заданными:
1)уравнение центрового профиля кулачка;
2)расстояние а;
3)эксцентриситет е;
4)угловую скорость ω;
5)текущий фазовый угол.
Требуется определить координаты xT , yT точки встречи толкателя
с точкой профиля кулачка |
при |
повороте последнего |
на угол φ, |
а также скорость в данный момент. |
|
|
Определим минимальный радиус. Из рис. 7.18 следует: |
|
R = |
e2 +(KK )2 , |
(7.4) |
min |
|
1 |
|
KK1 = y = |
2 px , |
(7.5) |
x = а – е. |
(7.6) |
Подставляя в формулу (7.4) значения (7.5), (7.6), получим |
|
Rmin = |
e2 + 2 p(a −e). |
(7.7) |
Определим на профиле кулачка координаты точки М, которая окажется в контакте с толкателем при повороте кулачка на заданный фазовый угол φ. Для этого необходимо совместно решить уравнение профиля кулачка и уравнение прямой у = kx +b, изображающей положение толкателя в обращенном движении (см. рис. 7.18).
Составим уравнения упомянутой прямой в системе хОу. Угловой коэффициент этой прямой равен tg(90 – φ). Отрезок, отсекаемый на оси Оу (с учетом знака) и равный ОK2 , определяется из следующих условий
(см. рис. 7.18):
nO1 = cose φ;
On = a − nO = a − |
e |
; |
(7.8) |
|
1 |
cosφ |
|
|
|
|
|
|
|
|
231 |
Стр. 231 |
ЭБ ПНИПУ (elib.pstu.ru) |
отсюда
|
|
|
e |
|
|
|
b = OK2 |
= a − |
ctgφ. |
(7.9) |
|
|
|
|
|
cosφ |
|
Тогда уравнение искомой прямой с учетом углового коэффициента и выражения (7.9) примет следующий вид:
|
|
e |
|
|
y = xctgφ− a − |
ctgφ. |
|
|
|
|
cosφ |
Решаем совместно уравнение (7.10) и уравнение параболы:
|
2 |
= 2 px, |
|
|
y |
|
e |
|
|
|
|
|
y |
= xctgφ− a − |
|
ctgφ. |
|
|
|
|
cosφ |
Решение системы уравнений (7.11) – это координаты точки М:
yM = ptgφ = p2tg2φ+ 2 p |
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
a − |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ |
|
|
|
|
|
|
|
|
|
(7.12) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x = ptg2φ± tgφ |
p2tg2φ+ |
2 p a − |
|
|
e |
|
|
+ a − |
|
e |
|
. |
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ |
|
|
cosφ |
Дифференцируя выражения (7.12) по времени, получим: |
dxM = |
ω1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
2 ptgφ± |
|
|
p2tg2φ+ 2 p |
a − |
|
|
+ |
|
2 |
|
|
|
|
|
dt |
|
|
cos |
|
φ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ptgφ(ptgφ−esin φ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
−esin φ), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
tg |
φ+ 2 p |
a |
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dy |
|
|
|
pω |
|
|
|
|
|
|
|
ptgφ−esin φ |
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
± |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
cos |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
dt |
|
|
|
φ |
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
tg |
|
+ 2 p a − |
|
|
|
|
|
|
|
|
(7.13) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ |
|
|
232
Стр. 232 |
ЭБ ПНИПУ (elib.pstu.ru) |

Определим x , y координаты точки |
M ' встречи толкателя с точ- |
T T |
|
|
|
0 |
|
|
кой М на профиле кулачка. В соответствии с рис. 7.18 имеем: |
|
|
xT = a − e . |
|
|
(7.14) |
Координату x определим из треугольника O K M ' |
: |
T |
|
|
|
1 1 |
0 |
|
y = M ' |
K = |
O M ' 2 − e2 . |
|
(7.15) |
T |
0 |
1 |
1 |
0 |
|
|
Радиус-вектор O1 M0' = O1 M определим как расстояние между двумя точками М и O1 , координаты которых известны (М ( xM , yM ),O1 (a, 0)):
O M = |
(a − x |
M |
)2 − y2 . |
(7.16) |
1 |
|
M |
|
Подставляя выражения (7.16) в (7.15), получаем:
y |
= M ' |
K = |
(a − x |
)2 − y2 |
−e2. |
(7.17) |
T |
0 |
1 |
M |
M |
|
|
Дифференцируя (7.17) по времени, получим абсолютную скорость толкателя при повороте кулачка на заданный угол:
|
|
|
dyT |
|
|
|
|
dxM (xM |
− a)+ dyM |
yM |
|
|
V = |
= |
|
|
dt |
dt |
|
. |
(7.18) |
|
|
|
|
|
|
|
|
|
|
T |
|
dt |
|
|
|
a2 −e2 − 2axM + xM2 + yM2 |
|
|
|
|
|
|
|
|
|
Производные |
|
dxM |
|
и |
|
dyM |
|
определяются по формулам (7.13). Диф- |
|
dt |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
ференцируя по времени выражение (7.18), можно определить ускорение толкателя.
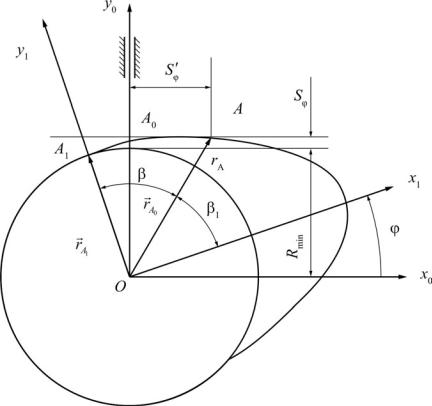
7.10.3. Профилирование кулачковой шайбы для механизмов с плоским толкателем
Для управления станками с ЧПУ при изготовлении кулачковых шайб требуется аналитическое выражение центрового и действительного профилей. Предлагаемый аналитический метод профилирования кулачковых шайб механизмов различных типов позволяет формализовать процесс определения координат профиля в декартовой или полярной системе координат с помощью ЭВМ. Применим данный метод при профилировании кулачковой шайбы с плоским толкателем.
233
Стр. 233 |
ЭБ ПНИПУ (elib.pstu.ru) |
Рассмотрим неподвижную систему координат x0Oy0 и подвижную систему координат x1Oy1 , жестко связанную с шайбой (рис. 7.19). Перемещение системы x1Oy1 относительно x0Oy0 характеризуется поворотом
кулачка на угол φ, при φ = 0 оси систем координат совпадают.
В системе x0Oy0 координаты точки контакта A0 определим радиу- сом-вектором rA0 которому соответствует столбцовая матрица:
|
xA0 |
|
|
Sφ' |
|
rA0 |
|
|
|
|
|
|
= yA0 |
|
= Sφ |
+ Rmin . |
|
|
1 |
|
|
1 |
|
|
|
|
|
|
В системе x1Oy1 координаты точки контакта A1 определим радиусом – вектором rA1 с помощью векторного выражения:
rA1 = M10rGA2 ,
где M10 – матрица перехода от системы x0Oy0 к системе x1Oy1 ,
Рис. 7.19. Профилирование кулачковой шайбы для механизма с плоским толкателем
234
Стр. 234 |
ЭБ ПНИПУ (elib.pstu.ru) |
|
cosφ |
sin φ |
0 |
|
M10 |
|
−sin φ |
cosφ |
0 |
|
= |
|
|
|
0 |
0 |
1 |
|
|
|
|
Тогда, согласно определению вектора,
xA |
|
|
S 'φ cosφ+(Sφ + Rmin )sin φ |
|
|
1 |
|
|
|
|
rGA1 = yA1 |
|
= |
−S 'φ sin φ+(Sφ+ Rmin )cosφ . |
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
В полярных координатах радиус-вектор кулачка
r = |
x2 |
+ y2 |
, |
A |
A |
A |
|
1 |
1 |
1 |
|
а полярный угол β = π2 −β1 , где β1 – угол, зависящий от координат точки
A1 на профиле кулачка, β1 = arctg(yA1 / xA1 ).
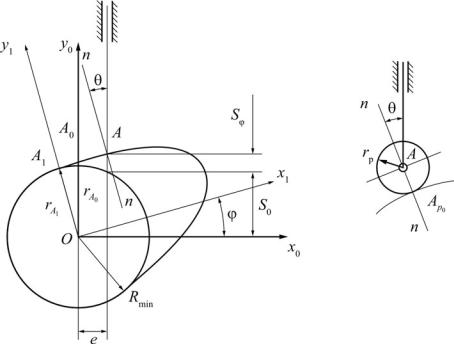
7.10.4. Профилирование кулачковой шайбы для механизмов
столкателем, оканчивающимся острием или роликом
Внеподвижной системе координат x0Oy0 радиус-вектор точки контакта A0 толкателя с шайбой представим столбцовой матрицей (рис. 7.20):
|
xA0 |
|
|
e |
|
|
|
T |
|
|
|
|
|
|
|
+ Sφ |
, |
|
rA0 = yA0 |
|
= S0 |
+ Sφ = |
e, S0 |
,1 |
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
где S0 – положение толкателя в начале его подъема; |
|
Sφ – текущее перемещение толкателя. |
|
|
|
|
В системе |
x1Oy1 координаты точки контакта |
A1 определим радиу- |
сом-вектором, |
rA с помощью матричного выражения: |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
T |
= M10rA0 = |
|
|
|
|
rA1 = xA1 , yA1 ,1 |
|
|
|
|
|
|
ecos φ + (S0 + Sφ )sin φ |
|
|
|
|
|
|
|
|
|
|
|
|
|
= M10 |
−ecos φ + (S0 + Sφ )cos φ |
, |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где M10 – матрица перехода от системы x0Oy0 |
к системе x1Oy1 , |
|
|
|
|
|
|
|
|
|
235 |
Стр. 235 |
ЭБ ПНИПУ (elib.pstu.ru) |
Рис. 7.20. Профилирование шайбы для механизма с толкателем, оканчивающимся острием
|
cosφ |
sin φ |
0 |
|
|
M10 |
|
−sin φ |
cosφ |
0 |
|
, |
= |
|
|
|
0 |
0 |
1 |
|
|
|
|
|
|
xA1 , yA1 – координаты радиуса-вектора rA1 .
Для перехода от центрового к практическому профилю запишем вектор rGAp 0 координат точки Ap0 контакта ролика с действительным про-
филем кулачка в начале подъема толкателя в системе координат x0Oy0 : rGAp 0 = xA0 + rp sin θ, yA0 − rp cosθ,1 T ,
где θ– угол давления, tgθ = |
Sφ + e |
; |
|
|
S0 − Sφ |
Sφ – аналог скорости толкателя, Sφ =VqBi ; rp – радиус ролика.
Тогда радиус-вектор точки контакта ролика и практического профиля (точки Ap1 ) в матричном выражении в системе x1Oy1 запишем в ви-
де столбцовой матрицы:
236
Стр. 236 |
ЭБ ПНИПУ (elib.pstu.ru) |
= x |
, y |
Ap1 |
,1 T |
= M |
rG |
= |
|
|
Ap1 |
|
|
10 |
Ap 0 |
|
xA1 |
+ rp sin (θ−φ) |
ecosφ+(S0 + Sφ )sin φ+ rp sin (θ− φ) |
|
yA |
+ rp cos(θ−φ) = |
|
−esin φ+ (S0 + Sφ )cosφ− rp (θ− φ) |
. |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для перехода к полярным координатам введем следующие обозначения:
β0 – постоянный угол, β0 = arctg Se0 ;
β1 – дополнительный угол, β1 = arctg yA1 . xA1
Отсюда полярный угол радиуса-вектора β =β0 −β1 . В полярных координатах радиус-вектор кулачка:
r = |
x2 |
+ y2 . |
A |
A |
A |
1 |
1 |
1 |
7.10.5.Профилирование кулачковой шайбы для механизма с коромыслом
При профилировании считаем заданными зависимость ψ = f (φ) угло-
вого перемещения выходного звена ψ от угла поворота кулачка φ, а также первую и вторую производные этого перемещения (ψ́,˝),ψдлину коромысла l2 , межосевое расстояние aw , минимальный радиус, радиус ролика rp .
На рис. 7.21 изображены неподвижная система координат x0Oy0 и подвижная система координат x1Oy1 , которые совпадают при φ = 0,
при этом начальное положение коромысла характеризуется значением ψ0 . Повороту кулачка на угол φ соответствует текущее положение
коромысла ψ.
В системе x0Oy0 координаты точки контакта A0 определим радиу- сом-вектором rGA0 , которому соответствует столбцовая матрица:
G |
xA0 |
|
l |
−l |
|
cos(ψ |
|
+ ψ) |
|
|
|
|
0 |
|
2 |
|
0 |
ψ) |
|
rA0 |
= yA0 |
|
= |
|
l2 sin (ψ0 + |
. |
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
237
Стр. 237 |
ЭБ ПНИПУ (elib.pstu.ru) |
Рис. 7.21. Профилирование кулачковой шайбы для механизма с коромыслом
В системе x1Oy1 координаты точки контакта A1 определим матрич- |
ным выражением |
|
|
|
|
|
|
|
r = M |
rG , |
|
|
|
|
A |
10 A |
|
|
|
|
1 |
0 |
|
|
где M10 – матрица перехода от системы x0Oy0 |
к системе x1Oy1 , |
|
cosφ |
sin φ |
0 |
|
M10 |
|
−sin φ |
cosφ |
0 |
|
= |
. |
|
|
0 |
0 |
1 |
|
|
|
|
G |
|
|
cosφ |
|
|
|
|
sin φ |
|
0 |
l |
−l |
|
|
|
cos(ψ |
|
|
|
+ ψ) |
|
|
|
|
|
|
|
−sin φ |
|
|
|
cosφ |
|
0 |
0 |
|
2 |
|
|
|
|
|
0 |
ψ) |
|
|
|
|
|
|
rA1 |
= |
|
|
|
|
|
|
l2 sin (ψ0 + |
|
|
= |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
−l |
2 |
( |
ψ |
0 |
+ ψ) |
cosφ+l |
2 |
sin (ψ |
0 |
|
+ ψ)sin φ |
|
|
|
|
0 |
0 |
|
( |
|
|
|
) |
|
( |
|
|
|
|
2 |
|
|
|
|
|
0 |
|
|
) |
|
|
|
−l |
2 |
cos |
ψ |
0 |
|
|
−sin φ |
) |
|
sin |
( |
ψ |
+ |
ψ |
cosφ |
= |
l |
|
|
|
|
+ ψ |
|
|
|
|
|
+ l |
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
cosφ−l |
2 |
cos(ψ |
0 |
+ ψ+ φ) |
xA |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
+ ψ+ φ) |
|
= y |
|
1 |
|
. |
|
|
|
|
|
|
= |
−l |
sin φ−l |
2 |
cos(ψ |
0 |
A1 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
238
Стр. 238 |
ЭБ ПНИПУ (elib.pstu.ru) |
В полярной системе координат радиус-вектор текущего положе-
ния точки контакта кулачка и толкателя |
r = |
x2 |
+ y2 |
, а полярный |
|
A |
A |
A |
|
|
1 |
1 |
1 |
|
β =β0 −β*.
Для описания практического профиля проводим нормаль к профилю n – n и вводим еще одну систему координат x2 Ay2 с центром в точке А.
В этой системе радиус-вектор, описывающий практический профиль, представим в виде
где θ – угол давления,
θ = arctg l2 ± Sφ −l0(cos(ψ0)+ ψ). l0 sin ψ0 + ψ
Для представления радиуса-вектора в системе x1Oy1 запишем матричное выражение:
rGAp1 = M10M02rGAp 2 = M12rGAp 2 ,
где M10 , M02 , M12 – матрицы преобразования координат.
Для примера рассмотрим составление матрицы для текущего положения толкателя:
cos(ψ0 + ψ)
M02 = −sin (ψ0 + ψ)0
sin (ψ0 + ψ) |
0 X |
cos(ψ0 + ψ) |
1 Y |
|
. |
0 |
0 1 |
|
|
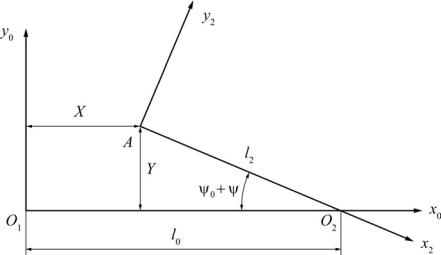
Координаты Х и Y начала координат А системы x2 Ay2 в неподвижной системе x0Oy0 (рис. 7.22) определим так:
X = l0 −l2 cos(ψ+ ψ0 );
Y = l2 sin (ψ+ ψ0 ).
239
Стр. 239 |
ЭБ ПНИПУ (elib.pstu.ru) |
Рис. 7.22. Определение столбца координат подвижной системы координат в неподвижной системе координат
Из матричного выражения получаем матрицу, содержащую координаты практического профиля:
|
|
xA |
p 1 |
|
rGAp 1 |
|
|
|
= y Ap 1 |
. |
|
|
1 |
|
|
|
|
240
Стр. 240 |
ЭБ ПНИПУ (elib.pstu.ru) |