

Министерство образования Российской Федерации. Государственное образовательное учреждение высшего профессионального образования
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра «МЕХАНИКА»
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Данное пособие входит в серию электронных учебных пособий по теоретической механике, разрабатываемых на кафедре механики СамГТУ.
Пособие предназначено для самостоятельного изучения студентами темы «Плоскопараллельное движение твердого тела».
Зав. кафедрой – д.т.н., проф. Я.М.Клебанов, Разработчики – Л.Б.Черняховская, Л.А.Шабанов.
Самара – 2008.
1
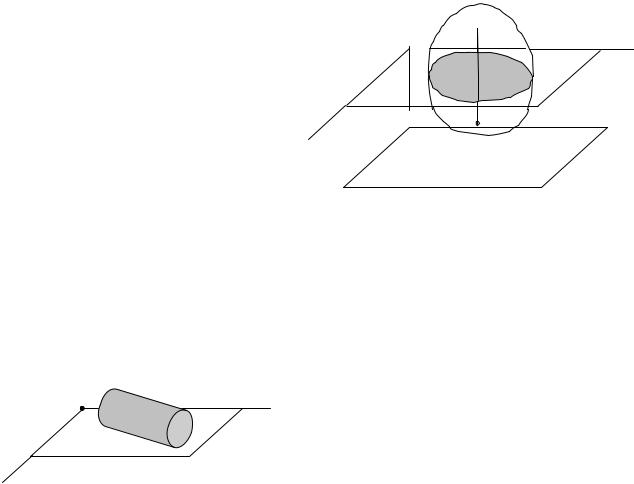
Определение плоскопараллельного движения
Плоскопараллельным называ- |
z |
|
|
|
|
|
|
|
|
|
|
|
|||
ется такое движение твердого |
|
|
|||||
|
|
|
|
|
|
||
тела (рис.1), при котором тра- |
|
|
|
|
|
|
|
ектории всех его точек лежат в |
О |
|
|
||||
плоскостях, параллельных одной |
|
|
|
|
|
|
|
и той же неподвижной плоско- |
1 |
|
|
|
|
|
|
сти. |
|
|
|
|
|
||
Неподвижная плоскость на- |
x |
|
|
|
|
|
|
|
|
|
|||||
зывается основной. |
|
|
|
|
|
|
|
Примером плоскопараллельного |
П |
||||||
движения может служить движение |
|||||||
|
|
|
|
|
|
||
цилиндра по горизонтальной плос- |
|
|
|
Рис.1 |
|||
кости, при котором его основание |
|
|
|
|
|
|
|
остается параллельным вертикальной плоскости (рис.2).
 А1 y
А1 y
 А
А
 А2
А2
|
|
|
|
|
Основная теорема плоскопарал- |
|
|
z |
|
|
|
лельного движения. |
|
|
|
|
|
|||
|
|
|
|
|
Все точки тела, лежащие на об- |
|
|
|
|
|
|
щем перпендикуляре к основной плос- |
|
|
|
|
|
у |
кости, движутся по одинаковым |
|
|
О |
|
|
траекториям и имеют геометриче- |
||
|
|
|||||
|
|
|
|
|
ски равные скорости и ускорения. Та- |
|
|
|
|
|
|
кими точками (рис.1) |
являются точки |
x |
|
|
Рис.2 |
|
А, А1, и А2. |
|
|
|
|
Сформулированное |
свойство явля- |
||
|
|
|
|
|||
ется следствием определения плоскопараллельного движения. Действительно, из определений плоскопараллельного движения и твердого тела следует, что углы между любыми прямыми, фиксированными в твердом теле, сохраняются неизменными. Следовательно любая прямая А1А2 , проведенная в теле, перпендикулярно основной плоскости П, будет перемещаться поступательно, т.е. траектории, скорости и ускорения всех точек этой прямой будут одинаковыми.
Таким образом, для определения движения тела необходимо знать движение лишь одной точки каждой прямой, проведенной перпендикулярно плоскости П, т.е. точки, лежащие в одной плоскости 1, параллельной основной плоскости, определяют плоскопараллельное движение твердого тела.
Плоскопараллельное движение твердого тела полностью характеризуется движением плоской фигуры в своей плоскости. Плоская фигура
(рис.1) получается сечением твердого тела плоскостью 1, параллельной ос-
новной плоскости П. Движение плоской фигуры в своей плоскости называ-
ется плоским.
2
Задание плоского движения |
||
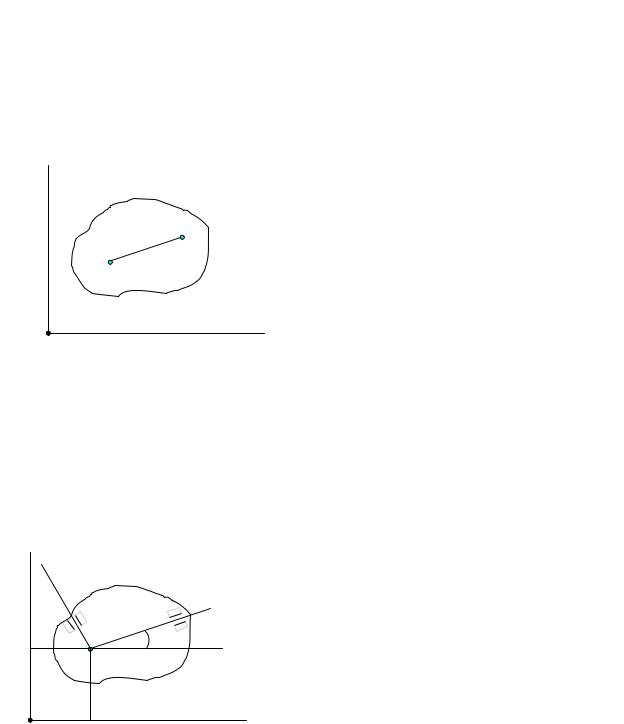
Рассмотрим движение плоской фигуры в своей плоскости. Положение |
||
плоской фигуры в своей плоскости определяется положением двух ее точек. |
||
Пусть точки (рис.3) А (хА,уА) |
и В (хВ, уВ) – две точки плоской фигуры, |
|
движущейся в плоскости Оху. Так как расстояние между этими точками ос- |
||
тается постоянным |
(xA − xB )2 +( yA − yB )2 = d 2 , |
|
у |
||
|
||
В |
то из четырех координат, определяющих |
|
положение этих точек, независимых ос- |
||
А |
||
тается только три. |
||
|
||
|
Таким образом, для описания плос- |
|
|
кого движения требуется знать три |
|
х |
независимых параметра. |
|
О |
Свяжем жестко с плоской фигурой |
|
Рис. 3 |
систему координат Ах1у1 (рис.4). Тогда |
|
|
положение системы Ах1у1 , а вместе с ней |
|
и положение плоской фигуры относительно системы координат Оху будет |
||
определено заданием координат хА,уА точки А и углом между φ между осями |
||
Ах1 и Ах2 (рис.4). |
|
|
Следовательно, положение плоской фигуры в своей плоскости в любой |
||
момент времени полностью определяется тремя функциями времени |
||
у |
у2 |
|
|
|
xA = xA (t), |
|
|
|
|
|
|||
|
|
|
yA = yA (t), |
(1) |
||
у1 |
|
|
х1 |
|||
|
|
|
ϕ =ϕ (t). |
|
||
|
|
|
|
|
|
|
|
|
|
φ |
х2 |
Уравнения (1) называются уравнениями |
|
|
|
|
||||
|
|
|
А |
|
||
уА |
|
|
|
движения плоской фигуры или уравне- |
||
|
|
|
|
|||
|
|
|
|
|
ниями плоскопараллельного |
движения |
О |
хА |
|
х твердого тела. |
|
||
|
|
|
|
Первые два уравнения (рис.3) опреде- |
||
|
Рис. 4 |
|
ляют положение выбранного полюса А на |
|||
|
|
плоскости, последнее - угол поворота во- |
||||
круг этого полюса.
3

Уравнения плоского движения.
Движение плоской фигуры в своей плоскости складывается из двух движений: поступательного вместе с произвольно выбранной точкой (полюсом), и вращательного вокруг этого полюса.
Положение плоской фигуры на плоскости определяется положением выбранного полюса и углом поворота вокруг этого полюса, поэтому плоское движение описывается тремя уравнениями:
xA = xA (t), yA = yA (t),
ϕ =ϕ (t).
Первые два уравнения (рис.5) определяют то движение, которое фигура совершала бы при φ = const, очевидно, что это движение будет поступательным, при котором все точки фигуры будут двигаться так же, как полюс А.
Третье уравнение определяет движение, которое фигура совершала бы при хА = const и уА = const, т.е. когда полюс А будет неподвижен; это движение будет вращением фигуры вокруг полюса А.
При этом вращательное движение не зависит от выбора полюса, а поступательное движение характеризуется движением полюса.
Определение скоростей точек плоской фигуры
у1
ρ |
B |
х1 |
А |
|
rA rB
х
О
3.3.1. Зависимость между скоростями двух точек плоской фигуры.
Рассмотрим две точки А и В плоской фигуры. Положение точки В относительно неподвижной системы координат Оху определяется радиусом-вектором rB (рис.5):
rB = rA + ρ,
Рис. 5 |
где rA - радиус-вектор точки А, ρ = АВ |
|
вектор, определяющий положение точки В |
относительно подвижных осей Ах1у1, перемещающихся поступательно вместе с полюсом А параллельно неподвижным осям Оху.
Тогда скорость точки В будет равна
|
|
|
= |
drB |
= |
drA |
+ |
d |
ρ |
|
V |
|
|||||||||
|
dt |
|
|
|
||||||
|
B |
|
|
dt dt . |
||||||
|
|
|
|
|
4 |
|||||
В полученном равенстве величина ddtrA =VA является скоростью полюса А.
Величина ddtρ равна скорости, которую точка В получает при rA = соnst, т.е.
относительно осей Ах1у1 при вращении фигуры вокруг полюса А. Введем для этой скорости обозначение VBA :
VBA = ddtρ .
Следовательно, VB =VA +VBA
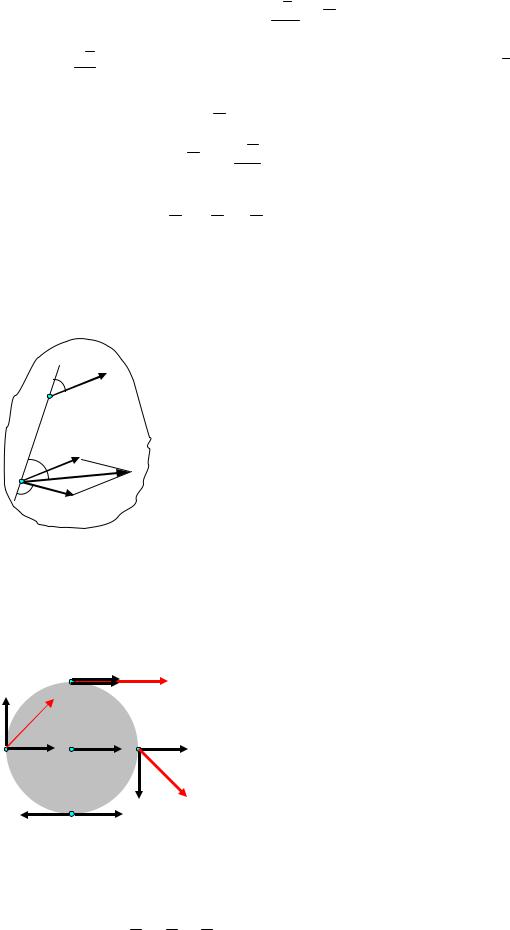
Скорость любой точки В плоской фигуры равна геометрической сумме скорости VA выбранного полюса А и скорости VBA точки во вра- В щательном движении вокруг полюса (рис.6):
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
VA |
VB =VA +VBA . |
(2) |
||||||||
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость вращательного движения |
|
|
|
|||||||
|
|
|
VBA точки |
|||||||||
β |
VA |
|
направлена перпендикулярно отрезку АВ и равна |
|||||||||
|
VB |
|
|
|
||||||||
|
|
|
|
|
|
|||||||
В |
|
|
|
VBA = ω AB |
|
|
|
|||||
900 |
VBA |
|
|
|
|
|
|
|
|
|
|
|
Модуль и направление скорости точки В нахо- Рис.6 дится построением соответствующего паралле-
лограмма (рис.6).
Задача 1. Найти скорости точек А, В и D обода колеса, катящегося по прямолинейному рельсу без скольжения, если скорость центра ко-
|
|
|
|
|
B |
VC |
|
|
леса С равна VC. |
|
|
|
|
||||||||||
|
|
|
|
|
VB |
|
Решение. Выбираем точку С, скорость |
||||||||||||||||
VАС |
|
|
|
|
VА |
|
VBC |
|
|||||||||||||||
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
которой известна за полюс. Тогда скорость |
||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
VC |
|
C |
|
VC D |
VC |
точки А равна |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
А |
|
|
|
VA =VC +VAC , |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
AC AC |
|
и |
по |
модулю |
||||
|
|
|
|
|
|
|
|
|
|
|
VD |
V |
|
||||||||||
|
VPC |
|
|
|
VC |
|
|
VAC =ω AC =ω R . |
|
|
|
|
|||||||||||
|
|
|
|
VDC |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Значение угловой скорости ω найдем из |
||||||||||
|
|
|
|
|
P |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
условия того, что точка Р колеса не скользит |
|||||||||||||
|
|
|
Рис. 7 |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
по рельсу и, следовательно, в данный мо- |
|||||||||||||||
мент равна нулю VР = 0. В данный момент скорость точки Р равна
VP =VC +VPC , где VPC =ω PC =ω R .
5