

Диск СГЭО (Лекции_СГЭО_ВЗО_2012) / Тема 10_Кинематика поршневого ДВС
.pdf88
Тема 10. КИНЕМАТИКА КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА ПОРШНЕВОГО ДВС
[3], §14.1, с.251–255; [4], § 23.1, с.289–298.
Основные схемы и параметры КШМ.
Формула перемещения поршня (графическое представление, анализ). Способ Брикса для приближенного определения перемещения поршня.
Скорость и ускорение движения поршня, формулы и графики в функции угла п.к.в., экстремальные значения. Графический способ Толле определения зависимости ускорения поршня от его перемещения.
Кривошипно-шатунный механизм (КШМ) поршневого ДВС служит для преобразования поступательного движения поршня во вращательное движение коленчатого вала.
При работе двигателя в КШМ возникают усилия, которые определяют при помощи уравнений кинематики и динамики механизма. Эти усилия учитывают в расчетах прочности деталей КШМ, в расчетах неуравновешенности двигателя и параметров механизмов его уравновешивания.
10.1. Основные схемы и параметры КШМ
Существуют три основные схемы КШМ, показанные на рис. 10.1:
Рис. 10.1. Основные схемы кривошипно-шатунного механизма
а – центральный (аксиальный, нормальный) КШМ, в котором ось цилиндра пересекает ось коленчатого вала;
б – смещенный (дезаксиальный) КШМ, где ось цилиндра не пересекает ось коленчатого вала, а смещена на некоторое расстояние e , которое обычно не превосходит 10% хода поршня; этот КШМ применяется главным образом в автомобильных (нереверсивных) двигателях для снижения нормальных усилий, передаваемых поршнем на втулку цилиндра.
в – КШМ с прицепным шатуном, где два шатуна передают усилия на одну шейку коленчатого вала ; в этом случае шатун, шарнирно соединенный с шейкой, называется главным, а шатун, шарнирно соединенный с нижней головкой главного шатуна – прицепным; такая схема применяется в V-образных двигателях, обладающих уменьшенными габаритами по сравнению с рядными двигателями.
В дальнейшем будет рассмотрен только центральный КШМ.

89
Параметры КШМ (см. рис. 10.1а): А′В = L – длина шатуна;
OB = R – радиус кривошипа;
λ = R L – постоянная КШМ (принимают в пределах от 1/5 до 1/2);
L – постоянная КШМ (принимают в пределах от 1/5 до 1/2);
S – ход поршня;
Sϕ – текущее перемещение поршня от положения ВМТ;
ϕ– угол поворота кривошипа (колена вала – угол п.к.в.);
β– угол отклонения шатуна.
Чем меньше λ (то есть чем длиннее шатун), тем меньше боковое усилие, передаваемое поршнем на втулку цилиндра. Однако с увеличением длины шатуна L возрастают масса движущихся частей КШМ и высота двигателя.
Угол β считается положительным при отклонении шатуна от оси цилиндра в сторону вращения коленчатого вала и отрицательным – при отклонении шатуна
впротивоположную сторону.
10.2.Формула перемещения поршня (графическое представление, анализ). Способ Брикса для приближенного определения перемещения
поршня
Кинематические зависимости представим преимущественно в функции угла поворота коленчатого вала ϕ .
Если текущее перемещение поршня Sϕ выразить в виде функции углов ϕ и β в
′ |
|
|
|
|
|
|
треугольниках А ВС и OBС , то можно получить точную формулу (см. [4], с.291): |
||||||
S |
ϕ |
= R |
1 − cos ϕ + |
1 |
(1 − cosβ) . |
(10.1) |
|
||||||
|
|
|
λ |
|
|
|
|
|
|
|
|
|
|
Формула (10.1) не вполне удобна, так как для ее применения необходимо наряду с углом п.к.в. ϕ предварительно определить угол отклонения шатуна β . Между тем эти углы некоторым образом связаны между собой. Поэтому в формуле (10.1) функцию угла β целесообразно выразить через функцию угла ϕ (см. [4], с.291–292 ). В результате получен один из наиболее распространенных вариантов приближенной формулы текущего перемещения поршня:
Sϕ |
= R (1 − cos ϕ) + λ (1 − cos 2ϕ) . |
(10.2) |
|
||
|
|
4 |
|
|
λ и |
Погрешность определения Sϕ |
по формуле (10.2) зависит от значения |
||||
составляет: ≈1% |
при λ =1/3 и |
≈0,1% при |
λ =1/4 (по |
сравнению с точной |
|
формулой (10.1)). |
|
|
|
|
|
Формула (10.2) представляет перемещение поршня как сумму двух гармонических перемещений первого и второго порядков:
Sϕ = SI + SII ,
где |
SI = R (1 − cos ϕ) |
– |
функция |
1-го |
порядка; ее период составляет один |
оборот |
||
коленчатого вала; |
|
|
|
|
|
|||
SII |
= |
Rλ |
(1 − cos 2ϕ) |
– |
функция |
2-го |
порядка; за один оборот коленчатого |
вала ее |
|
||||||||
|
4 |
|
|
|
|
|
|
|
изменение соответствует двум периодам.
90
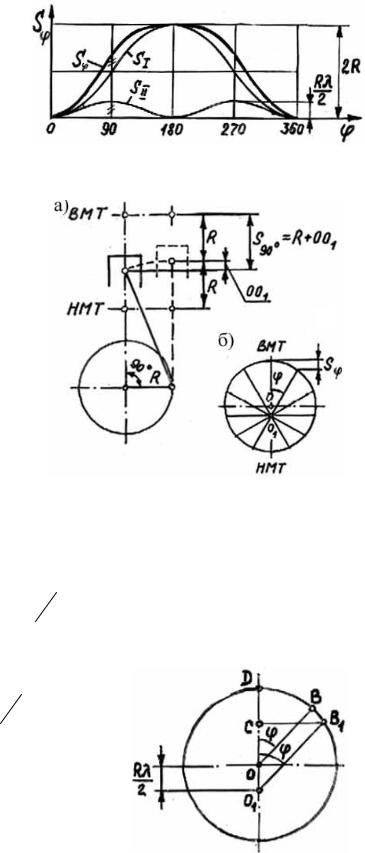
На рис. 10.2 представлены графики |
||
перемещения поршня Sϕ и его двух |
||
составляющих SI |
и SII . |
|
Заметим, |
что |
при |
гипотетическом |
шатуне |
|
бесконечной |
длины |
( L = ∞ ) |
постоянная |
КШМ |
λ = |
R |
= 0 . |
|
|||
∞ |
Рис. 10.2. Перемещение поршня |
|||||||
|
|
|
|
|
|
|||
Поэтому SII |
= 0 . То есть в этом |
|
||||||
случае |
|
|
перемещение |
|
||||
определяется только гармоникой |
|
|||||||
1-го порядка. Другими словами, |
|
|||||||
наличие гармоники 2-го порядка |
|
|||||||
вызвано |
конечностью |
|
длины |
|
||||
шатуна. Поясним это рисунком |
|
|||||||
10.3. |
|
|
|
|
|
|
|
|
На рисунке |
штриховой |
линией |
|
|||||
условно |
показана шатунно- |
|
||||||
поршневая группа |
деталей |
при |
|
|||||
бесконечной длине шатуна. При |
|
|||||||
этом для положения колена вала |
|
|||||||
ϕ =90º |
п.к.в. |
перемещение |
|
|||||
поршня |
Sϕ = R , то есть равно |
|
||||||
половине хода поршня |
S |
(или |
Рис. 10.3. Влияние конечности длины шатуна на |
|||||
амплитуде |
гармоники |
|
|
1-го |
перемещение поршня. Бицентровая диаграмма |
|||
порядка). |
|
|
|
|
|
|
Брикса |
|
При конечной длине шатуна, изображенного сплошной линией, для того же положения ϕ =90º п.к.в. перемещение
составляет R + OO , |
где OO = Rλ |
, то есть расстояние |
OO равно двойной |
||
1 |
1 |
|
2 |
|
1 |
амплитуде гармоники 2-го порядка (см. также рис. 10.2). |
|
||||
Таким образом, при повороте коленвала на угол |
|
||||
ϕ =90º п.к.в. от ВМТ поршень совершает более |
|
||||
половины своего хода на |
OO = Rλ |
2 |
(см. рис. |
|
|
|
1 |
|
|
|
|
10.2, 10.3а). Расстояние OO1 называют поправкой Брикса.
На рис. 10.3б представлена бицентровая диаграмма проф. Брикса, которая используется для графического определения перемещения поршня Sϕ при любом заданном угле ϕ .
Способ Брикса для приближенного определения
Рис. 10.4. К посторению диаграммы Брикса
Sϕ = f (ϕ) иллюстрирован рисунком 10.4. Суть
построения диаграммы Брикса состоит в том, что вращение кривошипа (колена) OB заменяют вращением радиуса O1B1 с центром в точке O1 . Для некоторого заданного угла
91
ϕ определяют точку C – проекцию точки B1 на вертикальный диаметр окружности.
Тогда отрезок DC представляет искомое текущее перемещение поршня Sϕ ,
соответствующее указанному углу ϕ .
При этом предполагается, что хорда BB1 перпендикулярна радиусу OB . Это
допущение вносит некоторую ошибку в результат построения, однако указанная погрешность тем меньше, чем меньше поправка Брикса, то есть чем меньше λ . В любом случае обсуждаемая погрешность обычно не имеет существенного значения при решении практических задач.
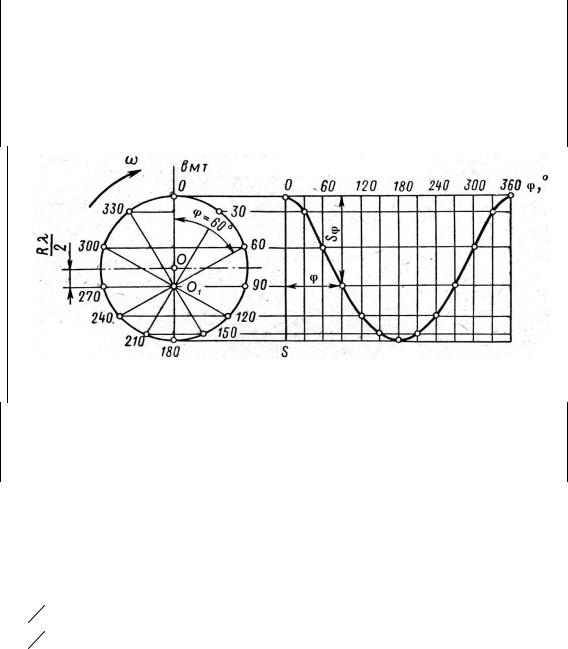
На рис. 10.5 показан пример построения Sϕ = f (ϕ) способом Брикса.
Рис. 10.5. Построение диаграммы перемещения поршня способом Брикса
Из точки O1 проведены лучи через каждые 30º. На правой части рисунка показано построение кривой перемещения поршня Sϕ в функции угла ϕ ,ºп.к.в.
Порядок построения пояснений не требует.
По формуле (10.2) перемещение поршня зависит от радиуса кривошипа R , определяемого размерами конкретного двигателя, то есть вычисляется в размерном виде. Для получения кинематических зависимостей общего вида, применимых к двигателям любых размеров, целесообразно определить перемещение в безразмерном виде. Для этого рассчитанное по формуле (10.2) перемещение Sϕ отнесем к радиусу кривошипа R :
s = |
Sϕ |
= |
R |
(1 - cos j) + l |
(1 - cos 2j) |
= (1 - cos j) + l (1 - cos 2j). (10.3) |
|
|
|
||||||
|
R R |
|
4 |
|
4 |
||
10.3. Скорость и ускорение движения поршня, формулы и графики в функции угла п.к.в., экстремальные значения
СКОРОСТЬ ПОРШНЯ
Выражение для скорости поршня находят, дифференцируя по времени зависимость для перемещения поршня. В общем виде скорость, м/с
V = |
dSϕ |
= |
dSϕ |
× |
dj |
= |
dSϕ |
× w, |
(10.4) |
|
d t |
dj |
d t |
dj |
|||||||
|
|
|
|
|
|
где τ – время, с; ω – угловая скорость движения коленчатого вала, с-1, причем
92
ω = |
dϕ |
= |
2πn |
= πn , |
(10.5) |
d τ |
|
||||
|
60 30 |
|
|||
где n – частота вращения коленчатого вала, мин–1 .
Учтем (10.4) и после дифференцирования зависимости (10.2) получим выражение для размерной скорости поршня, м/с:
|
λ |
|
(10.6) |
V = Rω sin ϕ + |
2 |
sin 2ϕ . |
|
|
|
|
Видим, что при конечной длине шатуна ( l ¹ 0 ) функцию (10.6) также как зависимость (10.2) можно представить в виде суммы двух гармоник:
V = VI + VII
где |
VI = Rω(sin ϕ) |
– |
гармоника 1-го порядка; |
ее период составляет один оборот |
|
коленчатого вала; |
|
|
|
|
|
II |
|
|
– |
гармоника 2-го порядка; |
за один оборот коленчатого вала ее |
V |
= Rω λ sin 2ϕ |
||||
|
2 |
|
|
|
|
изменение соответствует двум периодам.
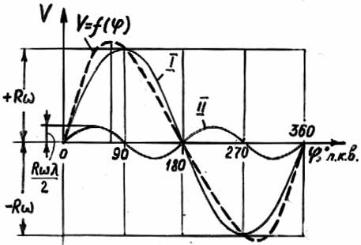
Графически скорость поршня показана на рис. 10.6.
На рисунке функция V = f (ϕ)
изображена штриховой линией, а гармоники 1-го и 2-го порядков – сплошной линией.
Заметим, что максимум скорости достигается при некотором угле п.к.в.
ϕ<90º.
Винтервале ϕ от 0 до 180º
скорость положительна, а в интервале ϕ от 180 до 360º Рис. 10.6. Скорость движения поршня скорость отрицательна.
Безразмерная скорость |
= sin ϕ + λ sin 2ϕ . |
|
||
v = |
V |
(10.7) |
||
Rω |
||||
|
2 |
|
||
Текущее значение размерной скорости (м/с) определяется по формуле |
|
|||
|
|
V = vRw. |
(10.8) |
|
УСКОРЕНИЕ ПОРШНЯ
Ускорение поршня (м/c2) определим дифференцированием выражения (10.6) по времени:
|
|
|
J = |
dV |
= |
dV |
× |
dϕ |
= |
dV |
× w |
(10.9) |
|
|
|
|
d t |
dj |
d t |
dj |
|||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
d |
|
λ |
|
|
= Rω2 (cos ϕ + λ cos 2ϕ). |
|
|||||
или |
J = Rω2 |
|
sin ϕ + |
|
sin 2ϕ |
(10.10) |
|||||||
|
|
||||||||||||
|
|
dϕ |
2 |
|
|
|
|
|
|
|
|
||
93
Аналогично зависимостям (10.2) и (10.6) выражение ускорения (10.10) может быть
представлено в виде суммы двух гармоник: |
|
J = J I + J II , |
(10.11) |
J I = Rω2 cos ϕ – гармоника 1-го порядка; ее период составляет один оборот коленчатого
вала; |
|
|
|
|
|
|
J II = Rω2λ cos 2ϕ – |
гармоника 2-го |
порядка; за один оборот коленчатого вала ее |
||||
изменение соответствует двум периодам. |
|
|||||
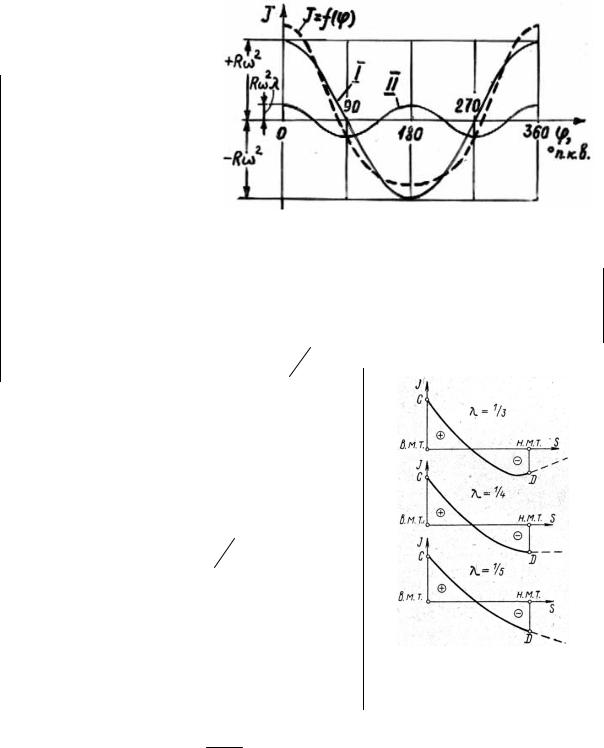
Графически ускорение поршня показано на рис. 10.7. |
||||||
На рисунке функция |
J = f (ϕ) |
|
||||
изображена |
штриховой |
линией, |
|
|||
а гармоники 1-го и 2-го |
|
|||||
порядков – сплошной линией. |
|
|||||
Видно, |
|
что |
|
кривая |
|
|
ускорения |
симметрична |
|
||||
относительно вертикальной |
|
|||||
оси, |
проходящей |
через |
|
|||
ϕ =180ºп.к.в. |
|
|
|
|||
При ϕ =0… |
≈80ºп.к.в. и при |
|
||||
ϕ ≈280… 360ºп.к.в. |
|
Рис. 10.7. Ускорение движения поршня |
||||
значения J |
положительны, |
|||||
|
||||||
а |
в |
|
диапазоне |
|
||
ϕ ≈80… |
≈280ºп.к.в. – |
отрицательны. |
|
|||
Значения углов ϕ , |
при которых J |
получается экстремальным, находят, приравняв |
||||
нулю производную по ϕ от правой части уравнения (10.10). Экстремумы имеют |
||||||
место при ϕ =0º; ϕ =180 º и ϕ = arccos( 14λ).
Подставляя два первых значения ϕ в уравнение (10.10), найдем следующее: в положении ВМТ,
|
то |
есть |
при |
ϕ =0º |
|
ускорение |
|
JВМТ = Rω2 (1 + λ) ; в положении НМТ, то есть |
|||||
|
при |
ϕ =180º ускорение |
JНМТ = −Rω2 (1 − λ). |
|||
|
Третье экстремальное |
значение |
J |
возможно |
||
|
только в том случае, когда 1 |
≤ 1,0 , то есть |
||||
|
при l ³ 0, 25 . |
|
4λ |
|
|
|
|
|
|
|
|
||
|
Характер кривых ускорения поршня |
J в КШМ |
||||
|
при |
l =1/3; 1/4; |
1/5 в |
функции |
перемещения |
|
|
поршня s представлена рис. 10.8. Штриховыми |
|||||
|
линиями показано направление касательных к |
|||||
|
кривым ускорения в НМТ. |
|
|
|||
Безразмерное ускорение |
|
|
|
|||
Рис. 10.8. Влияние λ на форму диаграммы ускорения поршня
j = |
J |
= cos ϕ + λ cos 2ϕ . |
(10.12) |
Rω2 |

94
Текущее значение размерного ускорения (м/с2) определяется по формуле |
|
J = jRω2 . |
(10.13) |
10.4. Графический способ Толле определения зависимости ускорения поршня от перемещения
Графическое построение кривой J = f ( s) показано на рис. 10.9.
На прямой линии отметим точки А
иВ, представляющие
соответственно |
ВМТ |
и |
НМТ |
|
||
поршня ( АВ – |
ход поршня). |
|
|
|
||
На перпендикулярах в точках |
А и |
|
||||
В, восстановленных к отрезку АВ, |
|
|||||
откладываем ускорение |
поршня |
в |
|
|||
ВМТ |
JВМТ = Rω2 (1 + λ) |
и |
в |
|
||
НМТ |
JНМТ = −Rω2 (1 − λ) . |
Рис. 10.9. Построение кривой ускорения поршня |
||||
Получаем точки С и D . |
|
|
|
способом Толле |
||
Прямая, соединяющая точки С и |
|
|||||
D , пересекает АВ в точке E . |
|
|
|
|||
На перпендикуляре, восстановленном |
к отрезку АВ в точке E , откладываем вниз |
|||||
отрезок EF = 3λRω2 . |
|
|
|
|
||
Отрезки CF и |
FD делим на равное количество частей и точки деления нумеруем так, |
|||||
как это указано на рисунке.
Соединим одноименные точки прямыми линиями 1–1'; 2–2' и т.д.
Проводим к полученному семейству прямых огибающую, которая и дает искомую зависимость J = f ( s ) .
Заметим, что способ Толе рекомендуется к использованию при λ до 0,26.
Для установления соответствия между углом поворота кривошипа ϕ и ускорения поршня J в случае, если последнее строится графически способом Толе, необходимо использовать построение Брикса.
В верхней части рис. 10.10 способом Толе построена кривая J = f ( s ) .
Под этой кривой строят бицентровую диаграмму Брикса и таким образом устанавливают соответствие между ϕ и J .
95
НЕКОТОРЫЕ ВЫВОДЫ
Анализ кинематики кривошипно-шатунного механизма показывает, что ускорение движения поршни (и других поступательно движущихся элементов механизма) можно рассматривать как функцию угла поворота коленчатого вала, состоящую из двух основных гармоник – гармоник первого и второго порядков. Как увидим далее, эти гармоники ускорения вызывают соответствующие силы инерции (первого и второго порядков) от поступательно движущихся масс. Действие указанных сил инерции вызывает неуравновешенность двигателя, которая проявляется в виде вибрации судового фундамента и корпуса судна в целом. Раздельное рассмотрение сил инерции первого и второго порядков необходимо, в частности, потому, что средства борьбы с их проявлениями несколько различаются.