

1. Описание механизма
Для привода нажимных винтов чаще применяют вертикальные двигатели, позволяющие передавать движение винтам без применения червячных редукторов с использованием только цилиндрических передач. Это значительно упрощает схему привода и повышает к. п. д. установки. Для этой цели применяют специальные вертикальные двигатели типа МПВ-42,3/78, (200/300 квт, 220/330 в, 500/750/1000 об/мин) с малым моментом инерции.
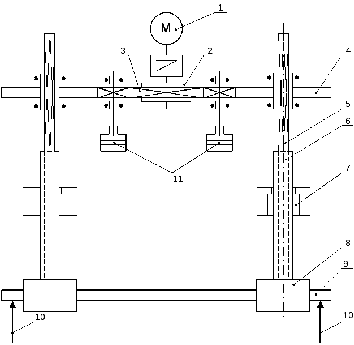
Рис. 1. Кинематическая схема нажимного устройства
Нажимное устройство имеет два нажимных винта (винты однозаходные) 6 с резьбой, вращающиеся в неподвижных гайках 7 и перемещающиеся в вертикальном направлении за счет резьбы. Гайки нажимных винтов изготовляют из литой бронзы. Для экономии бронзы гайки делают составными, бандаж делается чугунным или стальным. Нажимные винты изготовляют кованными из стали марок 40Х и 40ХН с пределом прочности σВ = 600 – 750 МПа. Нажимные винты опираются на подпятники установленные в подушках 8. Подушки 8 в которых на подшипниках скольжения установлен верхний валок перемещаются в окнах станины. Валок имеет систему гидравлического уравновешивания его веса 10, которая воздействует на балку 9. На другом конце квадратно-телескопического сечения 5 свободно перемещается цилиндрическая шестерня 4, жестко закрепленная относительно станины клети и связанная через промежуточную шестерню 3 с моторной шестерней 2, насаживаемой на вал двигателя вертикального исполнения 1. Между промежуточной шестернёй и цилиндрической шестернёй встроены шестерни включения 11 дающие возможность, работать одним винтом независимо от другого при выводе одной из шестерён включения из зацепления. Вывод шестерён осуществляется гидроприводом. Двигатель нажимных винтов связан через кинематический редукторы с сельсином ограничителем (СО) и с указателем раствора валков.
Смазывание зубчатых зацепления, подшипников цилиндрического редуктора и плоскостей и плоскостей износа квадратного отверстия в ступицах цилиндрических шестерней осуществляется от централизованной системы густой смазки и частично жидкой смазкой, поступающей от нажимного механизма.
2. Расчет параметров двигателя
Так как по условиям технологического процесса к механизму предъявляются требования по высокой точности работы, но серводвигателей на мощность
300 кВт не существует. То применяем асинхронный двигатель с короткозамкнутым ротором (в процессе проектирования возможно подключить в обратную связь по скорости, датчик положения). Выбираем двигатель с повышенным КПД в чугунном корпусе, фирмы ABB Motors M3BP 400 LA.
|
Мощность, кВт |
315 |
|
Напряжение питания, В |
380 |
|
КПД |
0,96 |
|
cos f |
0,81 |
|
Номинальное скольжение, % |
0,8 |
|
Критическое скольжение, % |
1,5 |
|
Перегрузочная
способность, |
2,6 |
|
Синхронная скорость вращения, об/мин |
750 |
|
Номинальная скорость вращения, об/мин |
744 |

Рассчитаем параметры схемы замещения двигателя
Определим номинальный ток фазы, А

Определим номинальную. частоту вращения ротора, рад/с

Определим значение номинальных потерь мощности, Вт

Определим значение номинальных механических потерь, Вт

Примем

Определим значение номинальных добавочных потерь, Вт

Примем

Определим момент холостого хода, Н∙м
Определим номинальный момент, Н∙м
Определим номинальный электромагнитный момент, Н∙м

Определим номинальные переменные потери в роторе, Вт

Зададимся
коэффициентом загрузки

Определим номинальные переменные потери, Вт

Рассчитаем постоянные потери и номинальные переменные потери в статоре, Вт


Определим активное сопротивление фазы статора, Ом
Определим максимальный электромагнитный момент, Н∙м

Определим приведенное активное сопротивление ротора, Ом



Определим индуктивное сопротивление короткого замыкания, Ом

Определим расчетное значение критического скольжения
Определим уточненный момент по формуле Клосса, Н∙м

Расчётное значение попадает в 5% значение.
Определим индуктивное сопротивление статора и ротора, Ом

Определим значение тока холостого хода, А

Определим потери в стали (Вт)

Определим эквивалентное сопротивление потерь, Ом

