Синхронные режимы параллельной работы синхронных машин
Режим работы синхронной машины параллельно с сетью при синхронной частоте вращения называется синхронным.
Рассмотрим
включенную на параллельную работу
неявнополюсную машину, пренебрегая
активным сопротивлением фаз обмотки
якоря ( ).
).
Ток
обмотки якоря будет равен![]()
Изменение реактивной мощности. Режим синхронного компенсатора.
В
случае, если выполнены все условия
включения генератора на параллельную
работу, ток якоря равен нулю, машина
работает на холостом ходу. Если ток
возбуждения генератора после синхронизации
увеличен, то
 ,
и возникает ток
,
и возникает ток ,
отстающей от
,
отстающей от на 90 эл.град. (рис.3.23,а). Машина будет
отдавать в сеть индуктивный ток и
реактивную мощность. Если ток возбуждения
генератора уменьшить, то
на 90 эл.град. (рис.3.23,а). Машина будет
отдавать в сеть индуктивный ток и
реактивную мощность. Если ток возбуждения
генератора уменьшить, то ,
возникает опережающий ток
,
возникает опережающий ток относительно
относительно и
и (рис.3.23,б). Машина будет отдавать в сеть
емкостной ток и потреблять из сети
реактивную мощность.
(рис.3.23,б). Машина будет отдавать в сеть
емкостной ток и потреблять из сети
реактивную мощность.
Синхронная
машина не несущая активную нагрузку и
загруженная реактивным током называется
синхронным
компенсатором.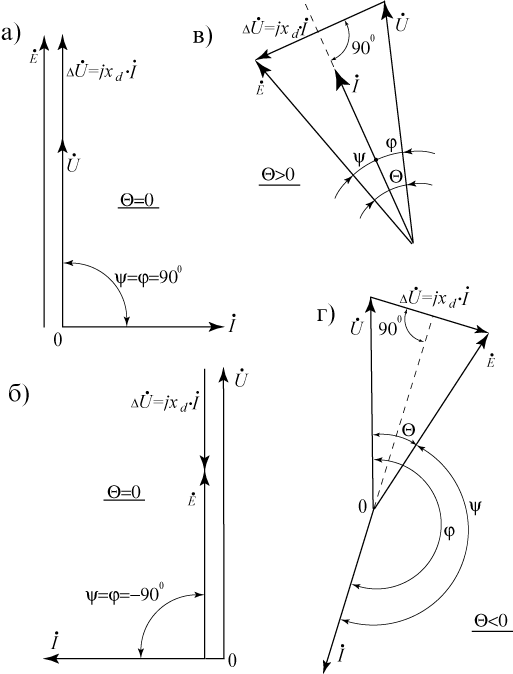
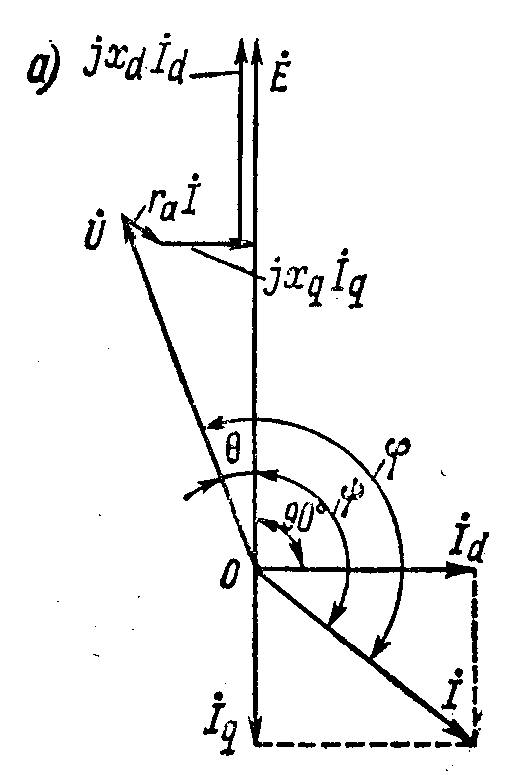
Изменение активной мощности. Режим генератора и двигателя.
Чтобы
включенная на параллельную работу
машина вырабатывала активную мощность,
работала в режиме генератора, необходимо
увеличить механический вращающий момент
на валу (рис.3.23,в). При этом возникает
ток ,
отстающий от
,
отстающий от на
на .
Значение активной мощности генератора
равно
.
Значение активной мощности генератора
равно![]()
Если,
наоборот, притормозить ротор машины,
создав на его валу механическую нагрузку,
то ЭДС
 будет отставать от
будет отставать от на угол
на угол ,
ток
,
ток от
от -
на угол
-
на угол (рис.3.23,г). При этом активная мощность
будет равна
(рис.3.23,г). При этом активная мощность
будет равна ,
машина будет работать в режиме двигателя,
потребляя активную мощность из сети.
,
машина будет работать в режиме двигателя,
потребляя активную мощность из сети.
Синхронный компенсатор
Синхронные компенсаторы предназначены для повышения коэффициента мощности сети и поддержания нормального уровня напряжения сети в районах сосредоточения потребительских нагрузок. Нормальным является перевозбужденный режим работы синхронного компенсатора, когда он отдает в сеть реактивную мощность.
Синхронные компенсаторы не имеют приводных двигателей и поэтому сами являются синхронными двигателями, работающими на холостом ходу, при этом из сети потребляя небольшую активную мощность для покрытия своих потерь. Пуск синхронных компенсаторов осуществляется также, как и синхронных двигателей.
Так как у синхронного компенсатора не ставится вопрос статической устойчивости, они выполняются с малым воздушным зазором, что позволяет облегчить обмотку возбуждения и уменьшить стоимость машины.
Регулирование активной мощности синхронной машины, включенной в сеть
После
включения в сеть методом точной
синхронизации синхронная машина работает
в режиме холостого хода (I1 =0). ЭДС Eo
находится в противофазе с напряжением
сети Uc (рис. 5.33, а). Для того, чтобы
синхронная машина отдавала в сеть
активную мощность, необходимо увеличить
внешний момент на валу Мвн в направлении
вращения ротора. Тогда ротор начнет
ускоряться. Вектор Ёo сместится на угол
Θ
в направлении вращения ротора и возникнет
ЭДС ΔE=Eo+Uc, под действием которой потечет
ток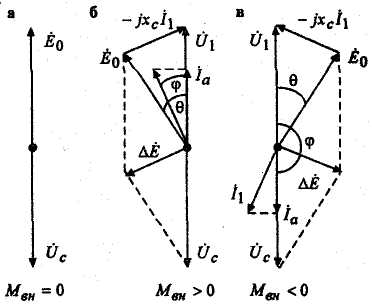
При этом вектор напряжения синхронной машины
сохранит свое положение в противофазе с вектором напряжения сети Uс Проекция тока статора I1; на напряжение U1 положительна, а на напряжение Uc отрицательна, поэтому активная мощность.
P1=mU1I1cosφ
= mU1Iα
будет вырабатываться синхронной машиной
в отдаваться в сеть. Синхронная машина
работает в режиме генератора.
Соответствующий активной мощности
электромагнитный момент
![]()
будет
девствовать против направления вращения
ротора. При равенстве моментов
![]()
увеличение
угла в прекратится и ротор вновь будет
вращаться с синхронной частотой.
Если
к валу двигателя приложить внешний
момент в направлении против вращения
ротора, то ротор начнет тормозиться.
Вектор E0 сместится на угол Θ
в отрицательном направлении (против
направления вращения). Под действием
возникшей ЭДС ΔЕ = Ёо + Uс потечет ток
![]()
проекция которого на вектор напряжения синхронной машины U1 будет отрицательной, а на вектор напряжения сети Uс - положительной (рис. 5.33, в). Следовательно, направление потока активной мощности изменится на обратное.
Синхронная машина переходит в режим двигателя, потребляя из сети активную мощность. Развиваемый ею электромагнитный момент будет действовать в направлении вращения ротора. При равенстве моментов Ме = Мвн торможение ротора прекратится, и он вновь будет вращаться с синхронной частотой.
Таким образом, синхронная машина обладает свойством саморегулирования (автоматического поддержания синхронной частоты вращения).
Регулирование реактивной мощности синхронной машины, включенной в сеть
Регулирование реактивной мощности в энергосистемах имеет такое же важное значение, как и регулирование активной мощности. Реактивная мощность необходима для создания магнитных полей во многих электротехнических устройствах, работающих в энергосистеме. Регулирование реактивной мощности позволяет повысить перегрузочную способность этих устройств, поддерживать постоянство напряжения в сети, снизить ее перетоки по линиям и тем самым обеспечить устойчивую и экономичную работу энергосистемы.
Вернемся вновь к режиму холостого хода синхронной машины (рис. 5.34, а).
В
том режиме по обмотке возбуждения
протекает ток If = Ifo, соответствующий по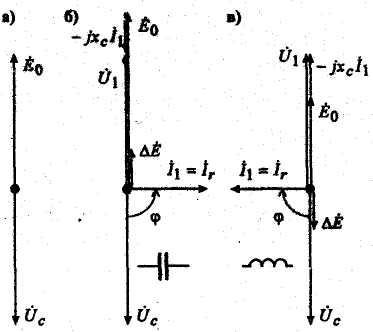
характеристике
холостого хода напряжению сети Uc = Eo .
Увеличим ток возбуждения If, тогда модуль
ЭДС Eo возрастет и возникнет ток
По
отношению к напряжению синхронной
машины U1 ток I1 будет индуктивным, а по
отношению к напряжению сети Uc - емкостным
(рис. 5.34, б), поэтому синхронная машина
вырабатывает и отдает в сеть реактивную
мощность
![]() При
уменьшении тока возбуждения (If <If0)
модуль ЭДС Eo снижается и фаза тока I1
меняется на противоположную (рис. 5.34,
в). В этом случае ток I1 по отношению к
напряжению синхронной машины U1 является
емкостным, а по отношению к напряжению
сети Uc - индуктивным. Следовательно,
сеть является источником реактивной
мощности, и синхронная машина ее
потребляет.
При
уменьшении тока возбуждения (If <If0)
модуль ЭДС Eo снижается и фаза тока I1
меняется на противоположную (рис. 5.34,
в). В этом случае ток I1 по отношению к
напряжению синхронной машины U1 является
емкостным, а по отношению к напряжению
сети Uc - индуктивным. Следовательно,
сеть является источником реактивной
мощности, и синхронная машина ее
потребляет.
Таким образом, изменение тока возбуждения синхронной машины обуславливает изменение в обмотке якоря реактивного тока и, следовательно, происходит регулирование реактивной мощности.
Синхронная машина, загруженная только реактивным током и не несущая активной нагрузки, называется синхронным компенсатором.
Регулирование
реактивной мощности возможно при работе
синхронной машины в режимах генератора
и двигателя. Согласно векторным диаграммам
(рис. 5.35), в генераторном режиме при
увеличении тока возбуждения (рис. 5.35,
а) синхронная машина отдает в сеть
реактивную мощность, а при уменьшении
тока возбуждения (рис. 5.35, б) потребляет
из сети реактивную мощность.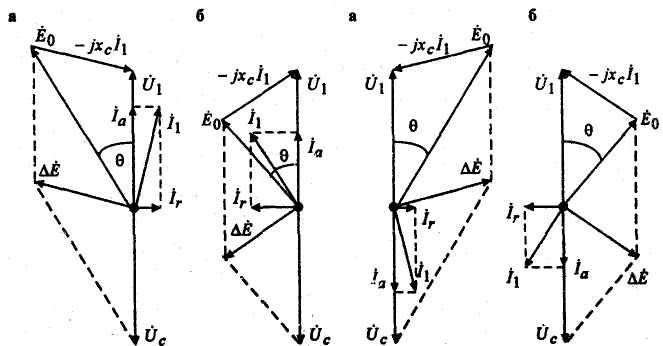
Аналогичные явления имеют место и в двигательном режиме (рис. 5.36).
Рис 5.35 рис 5.36
Угловая характеристика синхронной машины
Угловой характеристикой синхронной машины называют зависимость Р1 = f(Θ) при постоянных токе возбуждения, напряжении и частоте сети (If = const, Uc = const, fc = const). Знание этой характеристики позволяет установить ряд важных свойств синхронной машины, определяющих устойчивость ее работы параллельно с сетью.
Найдем эту зависимость для синхронной машины с явнополюсным ротором, полагая, что сопротивление якоря равно нулю (ra= 0) и машина не насыщена.
Активная
мощность синхронной машины определяется
выражением
![]()
Для
преобразования этого выражения в искомую
зависимость Р1 = f(Θ)
воспользуемся векторной диаграммой
синхронной машины, включенной в мощную
сеть с напряжением Uс = const и fс = const и
работающей в режиме генератора
с выдачей реактивной мощности в сеть
(рис. 5.37). 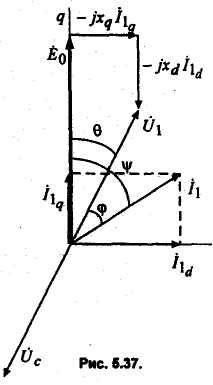
Согласно векторной диаграмме
φ=ψ-Θ
С
учетом этого соотношения выражение для
активной мощности преобразуется к виду
![]()
Учитывая,
что
![]()
выразим
активную мощность через продольную I1d
и поперечную I1q составляющие тока якоря:
![]()
Из
векторной диаграммы находим выражения
для продольной I1d. и подаренной I1q
составляющих тока якоря:
![]()
Подставляя эти выражения в формулу для активной мощности, получим
![]()
Если
синхронная машина имеет неявнололюскый
ротор (xd = xq), то второе слагаемое обращается
в нуль и![]()
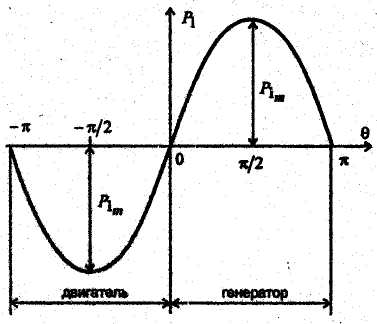
Согласно этому выражению угловая характеристика неявнополюсной машины является синусоидальной функцией угла Θ (рис. 5.38). При Θ > 0 мощность Р1 > 0, машина работает в генераторном режиме. При Θ<0 мощность Р1 <0, машина работает в режиме двигателя.
рис 5.38
При
Θ=
±π/2
синхронна машина развивает максимальную
по модулю мощность
Величина максимальной мощности Р1m прямо пропорциональна току возбуждения If (определяющему ЭДС Ео) и обратно пропорциональна полному индуктивному сопротивлению якоря по продольной оси xd. При проектировании синхронной машины сопротивление xd выбирают так, чтобы
при номинальном токе возбужденна If = Ifн кратность максимального момента была не менее 1,7
![]()
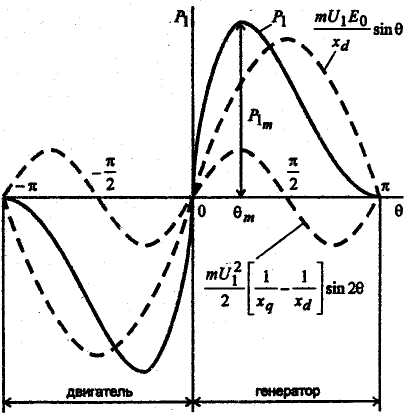
Выражение для угловой характеристики Р1 = f(0) явнополюсной синхронной машины содержит составляющую, зависящую от sin2Θ (рис. 5.39). Эта составляющая обусловлена магнитной несимметрией ротора и появлением в связи с этим в явнополюсной машине чисто магнитного вращающего момента из-за стремления ротора ориентироваться по оси магнитного поля (подобно магнитной стрелке компаса) Этот эффект существует даже при отсутствии возбуждения (Ео=0).
Синхронные машины, работающие без возбуждения, называются реактивными. Они имеют небольшую мощность (несколько киловатт). С целью повышения мощности в них стремятся конструктивными мерами увеличить разницу между сопротивлениями xd и xq, так чтобы отношение xd/xq =3-4. В синхронных машинах нормального исполнения отношение xd/xq ≈1,5. Поэтому амплитуда второй гармоники мощности не превышает 25% от амплитуды первой гармонической составляющей.
U-образные характеристики
Для анализа свойств синхронной машины, работающей параллельно с сетью, наряду с угловой характеристикой Р1 = f(Θ) важное значение имеют U-образные характеристики, представляющие зависимость тока якоря в функции тока возбуждения I1 =f(If) при постоянных активной мощности, напряжении и частоте сети (Р1= const, Uc= const, fc = const). U-образные характеристики могут быть построены с помощью векторных диаграмм, учитывающих насыщение стали. На рис. 5.41 приведены векторные диаграммы неявнополюсного синхронного генератора (τа = 0).
В
соответствии с условием Р1 =m1U1I1 cosφ
= const активная составляющая тока якоря
![]()
поэтому концы вектора тока I1 будут лежать на линии I, перпендикулярной вектору напряжения U1, а концы вектора результирующей ЭДС

![]()
будут лежать на линии П, параллельной вектору напряжения. Цифрами на этих линиях отмечены расчетные точки U-образной характеристики для мощности Р1, соответствующей току Ia =0,8о.е.
Модуль ЭДС Eμr определяет по характеристике холостого хода суммарную МДС Fμ.
Вектор Fμ опережает ЭДС Eμr на 90°. Вычитая из него вектор МДС реакции поля Fa, находим вектор МДС обмотки возбуждения
![]()
и соответствующий ему ток возбуждения
![]() Геометрическим
местом концов вектора МДС Ff является
линия IV, на которой цифрами указаны
расчетные точки, соответствующие
заданным токам якоря на линии I.
Геометрическим
местом концов вектора МДС Ff является
линия IV, на которой цифрами указаны
расчетные точки, соответствующие
заданным токам якоря на линии I.
Полученная таким образом зависимость I1=f(If) представлена на рис. 5.42 с отмеченными на ней расчетными точками.
Аналогично производится построение U-образных характеристик для других значений активной мощности. Минимумы U-образных характеристик соответствуют активным составляющим тока якоря, поэтому линия, соединяющая минимумы, представляет собой регулировочную характеристику генератора при cosφ = 1. Точки U-образной характеристики, лежащие правее ее минимума, соответствуют режиму перевозбуждения, а левее - режиму недовозбуждения.
В режиме перевозбуждения ток якоря I1 отстает от напряжения U1, машина отдает в сеть реактивную мощность (Q1 > 0). В режиме недовозбуждения ток I1 опережает вектор напряжения U1, синхронная машина потребляет из сети реактивную мощность (Q1 < 0).
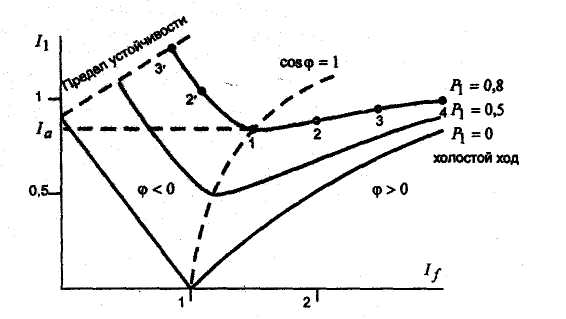
Минимальное значение тока возбуждения ограничивается пределом статической устойчивости генератора Р1m= , равным мощности Р1, при которой построена U-образная характеристика. Максимальная величина тока определяется допустимым перегревом обмотки возбуждения.
Синхронные двигатели, пуск и т.п.
Синхронная машина, как любая электрическая машина, обратима, т.е. может работать как в двигательном, так и в генераторном режимах. Однако особенности работы машины в том или ином режиме предъявляют различные требования к ее конструктивному исполнению. Наиболее существенным отличием условий работы синхронного двигателя является процесс включения его в сеть, называемый пуском.
Собственный пусковой момент синхронного двигателя равен нулю, так как вследствие инерции ротора поток возбуждения Фf не может сразу достичь синхронной частоты вращения потока статора Ф1. Поэтому после включения возбуждения двигателя в сеть при n = О поля Фf и Ф1 перемещаются относительно друг друга с большой скоростью, и среднее взаимодействие этих полей равно нулю.
Пуск синхронного двигателя можно осуществить с помощью преобразователя частоты, который плавно повышает частоту вращения поля якоря Ф1 от нуля до номинального значения по мере разгона двигателя. Такой способ пуска называется частотным. Возможен также пуск синхронного двигателя при помощи дополнительного асинхронного двигателя, осуществляющего предварительный разгон недовозбужденного синхронного двигателя до подсинхронной частоты вращения. Затем производится включение синхронного двигателя в сеть и его синхронизация по методу грубой синхронизации подобно тому, как это делается для синхронных генераторов.
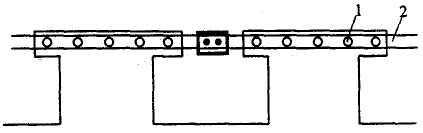
Однако наиболее распространенным является асинхронный пуск синхронного двигателя. С этой целью на роторе в специальных пазах полюсных наконечников явнополюсных синхронных двигателей размещают коротко-замкнутую обмотку (рис. 5.43) в виде латунных, медных ели бронзовых стержней 1, соединенных по торцам короткозамыкающими кольцами 2. Эта обмотка называете» пусковой. При использования массивных плюсов, а также в случае неявнополюсных синхронных двигателей с ротором в виде массивного стального цилиндра роль пусковой обмотки выполняет внешняя поверхность полюсов или цилиндра ротора
5.43
5.44
5.45
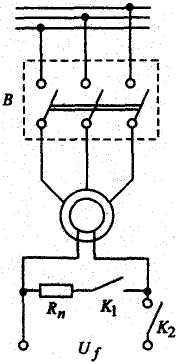
Схема асинхронного пуска представлена на рис. 5.44. В соответствии с этой схемой процесс пуска выполняется в два этапа. На первом этапе после включения обмотки статора в сеть ротор двигателя разгоняется под действием асинхронного момента до подсинхрояной частоты вращения. Скольжение ротора
![]()
Обмотка возбуждения в течение первого этапа пуска замыкается на активное сопротивление Rn = (5 - 10)rf. Оставлять обмотку возбуждения разомкнутой нельзя, так как вращающееся поле статора наводит в ней в начальный период пуска значительную ЭДС, способную «пробить» изоляцию обмотки возбуждения и опасную для эксплуатационного персонала.
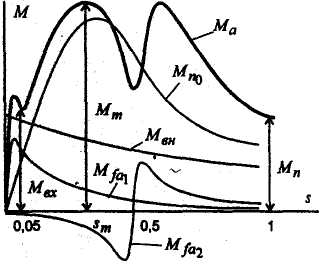
Замыкать обмотку возбуждения накоротко также нецелесообразно, так как при этом возрастают провалы в кривой асинхронного момента Ма (рис.5.45). Обмотка возбуждена является однофазной обмоткой. Индуцированный в ней ток создает пульсирующее магнитное поле. Прямо вращающаяся составляющая этого поля создает момент Mfa1, а обратно вращающаяся составляющая - момент Mfa2, (см. п.4.13.2). При суммирования этих моментов с моментом пусковой обмотки Мn0 в кривой результирующего момента Ма = f(s) появляются провалы в зоне малых скольжений и в области скольжения s = 0,5, которые могут затруднить пуск двигателя. Введение в цепь обмотки возбуждения дополнительного сопротивления Rn позволяет уменьшить величину этих провалов. Для оценки пусковых свойств синхронного двигателя используются три показателя:
кратность пускового момента Mn/MH
кратность максимального момента Mm/MH
кратность входного момента Mвх/ MH.
Входной момент определяется при скольжении s = 0,05, примерно соответствующем верхнему уровню скольжения, при котором двигатель может войти в синхронизм после подачи возбуждения. Момент сопротивления на валу двигателя Мвн должен быть меньше развиваемого двигателем асинхронного момента Ма (рис. 5.45). Разность моментов Ма н Мвн определяет динамический момент
![]()
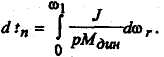
Чем больше динамический момент, тем меньше время пуска
Если
динамический момент мал, то пуск
затягивается. Это может привести к
перегреву обмотки статора и пусковой
обмотки из-за значительных токов,
протекающих по этим обмоткам при
асинхронном пуске. Пусковой ток статарной
обмотки (при s = 1) в несколько раз превышает
номинальный ток и обычно составляет
![]()
Второй этап пуска начинается, когда ротор достигнет установившейся частоты вращения (s=0,03 - 0,05), и обмотка возбуждения подключается к источнику постоянного тока (возбудителю). После включения возбуждения на ротор помимо асинхронного момента начинает действовать синхронный момент Мс, зависящий от тока возбуждения If и угла Θ.
Достоинства и недостатки синхронного двигателя в сравнении с асинхронным.
Синхронные двигатели имеют следующие достоинства:
а) возможность работы при cos φ = 1; это приводит к улучшению cos φ сети, а также к сокращению размеров двигателя, так как его ток меньше тока асинхронного двигателя той же мощности. При работе с опережающим током синхронные двигатели служат генераторами реактивной мощности, поступающей в асинхронные двигатели, что снижает потребление этой мощности от генераторов электростанций;
б) меньшую чувствительность к колебаниям напряжения, так как их максимальный момент пропорционален напряжению в первой степени (а не квадрату напряжения);
в) строгое постоянство частоты вращения независимо от механической нагрузки на валу.
Недостатками синхронных двигателей являются:
а) сложность конструкции;
б) сравнительная сложность пуска в ход (см. § 6.14);
в) трудности с регулированием частоты вращения, которое возможно только путем изменения частоты питающего напряжения.
Указанные недостатки синхронных двигателей делают их менее выгодными, чем асинхронные двигатели, при ограниченных мощностях до 100 кВт. Однако при более высоких мощностях, когда особенно важно иметь высокий cos φ и уменьшенные габаритные размеры машины, синхронные двигатели предпочтительнее асинхронных.
Регулирование частоты вращения синхронных двигателей
Принципы регулирования. Частота вращения синхронного двигателя п2 равна частоте вращающегося магнитного поля n1 = 60f1/p. Следовательно, ее можно регулировать путем изменения частоты питающего напряжения или числа полюсов 2р. Регулировать частоту вращения путем изменения числа полюсов в синхронном двигателе нецелесообразно, так как в отличие от асинхронного здесь требуется изменять число полюсов как на статоре, так и на роторе, что приводит к значительному усложнению конструкции ротора. Поэтому практически используют лишь изменение частоты питающего напряжения.
К синхронному двигателю применимы все основные положения теории частотного регулирования асинхронного двигателя, в том числе необходимость одновременного изменения как частоты, так и питающего напряжения. Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при очень малых мощностях, когда нагрузочные моменты невелики, а инерция приводного механизма мала. При больших мощностях такие условия имеются только в некоторых типах электроприводов, например в электроприводах вентиляторов.
Для синхронных двигателей, применяемых в электроприводах с большим моментом инерции приводного механизма, необходимо очень плавно изменять частоту питающего напряжения, чтобы двигатель не выпал из синхронизма. Особенно сложным является пуск в ход двигателя, когда начальная частота должна составлять доли герца, а затем постепенно повышаться до максимального значения. Для таких электроприводов наиболее пригодным является метод частотного регулирования с самосинхронизацией, при котором двигатель в принципе не может выпасть из синхронизма.
Частотное регулирование без самосинхронизации. Электромагнитный момент синхронного двигателя
Частотное регулирование без самосинхронизации. Электромагнитный момент синхронного двигателя
М = см IаФв cos ψ = см IаФв cos (φ + θ). (6.48)
При частотном регулировании обычно стремятся получить режим работы двигателя с cos φ = 1, когда в обмотке якоря имеются минимальные потери энергии. Для этого ток якоря Iа должен поддерживаться постоянным и минимальным:
Iаmin = М/(смФв cos θ). (6.49)
Из (6.49) следует, что при неизменных нагрузочном моменте (Мн = М = const) и потоке возбуждения (Фв = const), т. е. токе возбуждения (Iв = const), угол θ в процессе регулирования частоты не должен изменяться. Однако при изменении частоты f1 изменяются ЭДС Е0, угловая скорость ротора ω1 и индуктивное сопротивление Хсн (или сопротивления Хd и Xq при явно-полюсном роторе), т. е.
Е0/Е0ном = Хсн /Хсн.ном = ω1/ω1ном =f1/f1ном . (6.50)
Поэтому при частотах питающего напряжения f1, отличных от номинальной частоты f1ном, формула электромагнитного момента [см. (6.35)] принимает вид
M = mUE0 sin θ = mE0номU * f1ном sin θ = C U sin θ = const, (6.51)
ω1Xсн ω1ном Xсн ном f1 f1
где С = mЕ0ном f1ном /(ω1ном Хсн.ном ) - постоянная.
Из (6.51) следует, что при неизменных значениях нагрузочного момента Мн = М и тока якоря
Iа = Iамин необходимо выдерживать условие
U/f1 = const, (6.52)
т. е. изменять напряжение U, подаваемое к электродвигателю от преобразователя частоты, пропорционально изменению частоты f1. При соблюдении условия (6.52) все стороны треугольника ОАВ (рис. 6.50, а) изменяются пропорционально частоте, а угол 0 остается неизменным. При изменении нагрузки необходимо в соответствии с (6.48) изменять поток возбуждения Фв , т. е. ток возбуждения Iв .
Вентильный двигатель. Принцип частотного регулирования с самосинхронизацией заключается в том, что управление преобразователем частоты осуществляется от системы датчиков положения ротора, вследствие чего напряжение подается на каждую фазу двигателя при углах нагрузки θ < 90°. При таком регулировании автоматически обеспечиваются условия устойчивой работы двигателя и его перегрузочная способность определяется только перегрузочной способностью преобразователя частоты.
Синхронные двигатели, регулируемые путем изменения частоты с самосинхронизацией, называют вентильными двигателями; иногда их называют бесколлекторными двигателями постоянного тока. Однако первое название является более правильным, так как эти двигатели могут получать питание от сети как постоянного, так и переменного тока.
При питании вентильного двигателя от сети постоянного тока в преобразователе частоты должны применяться тиристоры с узлами принудительной коммутации. В двигателях малой мощности допустимо применение транзисторов. При питании вентильного двигателя от тиристорного преобразователя частоты, основанного на использовании автономного инвертора напряжения
Способы пуска синхронных двигателей.
В подавляющем большинстве случаев применяется асинхронный пуск синхронных двигателей
Обычно
синхронные двигатели имеют на своем
валу возбудитель в виде генератора
постоянного тока параллельного
возбуждения (рис. 1).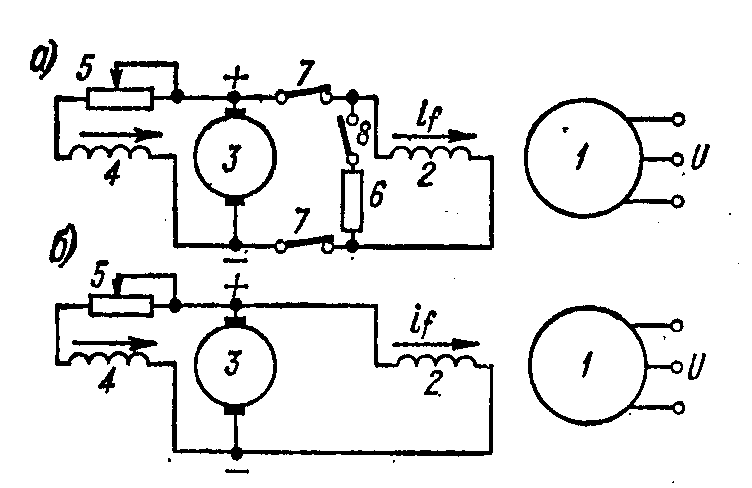
При пуске по схеме рис. 1, а контакты 7 разомкнуты, а контакт 8 замкнут. При этом обмотка возбуждения двигателя 2 замкнута через сопротивление 6 и асинхронный пуск происходит в наиболее благоприятных условиях. В конце асинхронного пуска, при s = 0,05, срабатывает частотное реле, обмотка которого подключена к сопротивлению 6, и включает контактор цепи возбуждения. Контакты 7 контактора при этом замыкаются, а контакт 8 размыкается. В результате в обмотку 2 подается ток возбуждения и двигатель втягивается в синхронизм.
Векторные диаграммы синхронных двигателей
Векторные диаграммы синхронных двигателей можно изображать двояким образом.
На диаграмме рис. а ток I как и у генератора, рассматривается как отдаваемый в сеть. Проекция этого тока на направление U отрицательна, что свидетельствует о том, что активная составляющая тока в действительности потребляется из сети.
Если на диаграмме рис. а вектор тока повернуть на 180° и изменить знак у вектора E, так как положительные направления I и E должны изменяться одновременно, то получим диаграмму рис. б, на которой ток I надо рассматривать как потребляемый из сети. Проекция I на
направление ^ U положительна, что указывает на потребление активного тока из сети.
Из
рис. а следует, что отдаваемая в сеть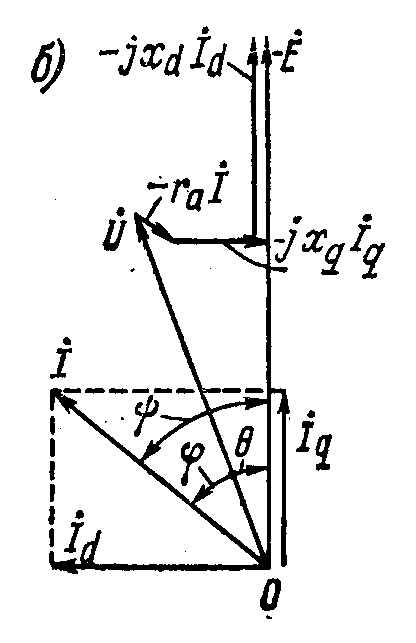
активная мощность, а в соответствии с рис., б потребляемая из сети активная мощность
Диаграммы соответствуют перевозбужденному двигателю, и такой двигатель, согласно рис. а, отдает в сеть отстающий ток, а согласно рис. б, потребляет из сети. Если рассматривается только двигательный режим синхронной машины, то более удобно пользоваться диаграммой рис. б.
Как влияет насыщение стали на ток возбуждения холостого хода генератора?
Ответ: Чем больше насыщение тем меньше ток возбуждения, это объясняется меньшими потерями тока возбуждения на создание реактивной мощности и перемагничивания. см конспект.
Чем обусловленно различие между Xd иXq у явнополюсной машины
xd - полное индуктивное сопротивление якоря по продольной оси; xq - полное индуктивное сопротивление якоря по поперечной оси. где
xd = xad + xsa;
xq = xaq + xsa.
Векторная диаграмма короткого замыкания
Зависимость Iк = f(Iв) называется характеристикой КЗ. Прямолинейность характеристики указывает на то, Что магнитная система генератора в этом режиме не насыщена. Чем больше размагничивающее действие тока КЗ, тем ниже располагается характеристика КЗ.
Характеристики
ХХ и КЗ снимаются при вводе машины в
эксплуатацию, а также после проведения
ремонтов. Синхронная машина обратима
и может работать в режиме генератора,
двигателя или синхронного компенсатора.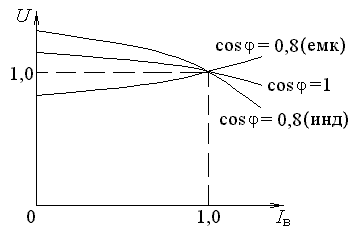
Как видно из векторных диаграмм ХХ и нагрузки мощность синхронной машины зависит от угла опережения между ЭДС, создаваемой током возбуждения, и напряжением на зажимах обмотки якоря. При холостом ходе он равен нулю, а с ростом нагрузки увеличивается. Причем в режиме генератора > 0, т.е. ЭДС опережает напряжение, в режиме двигателя он меньше нуля, а в режиме синхронного компенсатора 0.
Процессы в генераторе определяются его параметрами: индуктивными сопротивлениями (синхронными, переходными и сверхпереходными), отношением короткого замыкания (ОКЗ) и постоянными времени различных контуров.
Взаимосвязь всех режимных параметров синхронных генераторов во всем диапазоне нормальных режимов определяется его характеристиками: внешней (зависимость напряжения на зажимах генератора от тока статора при постоянном возбуждении - U = f(I) при Iв = const), регулировочной (зависимость тока возбуждения от тока статора при постоянном напряжении на зажимах - Iв = f(I) при U = const), U-образной (зависимость тока статора от тока возбуждения при постоянстве мощности на валу - I = f(Iв) при P = const), которые могут быть найдены приближенно аналитически или сняты экспериментально.
Внешняя характеристика показывает как изменяется напряжение на выводах генератора при изменении нагрузки. Вследствие падения напряжения на сопротивлении обмотки статора напряжение на выводах с ростом активной нагрузки уменьшается. При активно-индуктивной нагрузке происходит еще большее уменьшение напряжения. Однако при работе генератора на активно-емкостную нагрузку, например на длинную слабозагруженную линию, напряжение с ростом нагрузки может увеличиваться.
Снятие рабочих характеристик генератора
Характеристики генератора определяют его рабочие свойства и представляют зависимость между основными величинами, которыми являются э. д. с. в обмотке якоря Е, напряжение на его зажимах и, ток в якоре Iя, ток возбуждения Iв и скорость вращения якоря п.
Характеристики представляют собой зависимости между двумя из указанных основных величин при неизменных остальных. Эти зависимости имеют различный вид для генераторов разных типов.
Снятие всех характеристик машины производится при постоянной скорости вращения якоря, так как при изменении скорости значительно изменяются все характеристики генератора.
Характеристика холостого хода генератора представляет собой зависимость между э. д. с. в якоре и током возбуждения, снятую при отсутствии нагрузки и постоянном числе оборотов.
Подключают нагрузку, под действием чего в ней устанавливается ток, величина и напряжение которого поддерживает неизменный магнитный поток. Из этого режима определяют процентное изменение напряжения на зажимах во всем диапазоне изменения нагрузки (от 0 до номинального).
Процентное изменение напряжения генератора
где Uхх – напряжение на зажимах в режиме холостого хода; Uном – номинальное напряжение генератора.
Из этого режима также строят внешнюю характеристику трансформатора.
Регулировка мощности СГ
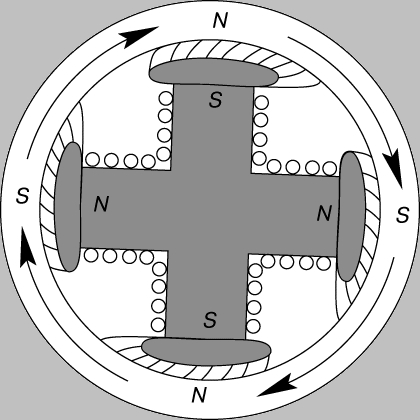
Трехфазный
синхронный генератор - обратимая машина,
т.е. если обмотку якоря подключить к
шинам трехфазного напряжения, а ротор
довести до синхронной частоты вращения,
то генератор будет работать как двигатель,
создавая вращающий момент на валу.
Синхронный двигатель почти всегда
(исключение - микродвигатели) работает
при многофазном питании обмоток статора,
создающих вращающееся магнитное поле.
Полюса ротора входят в синхронизм с
полюсами статора и увлекаются ими
(рис.). Поэтому при постоянной частоте
напряжения питания частота вращения
синхронного двигателя постоянна и равна
S = (120f)/P (об/мин). Важное достоинство
синхронного двигателя состоит в том,
что он позволяет регулировать коэффициент
мощности изменением тока возбуждения.
Таким путем можно установить коэффициент
мощности, равный 1. В случае недовозбуждения
(ток возбуждения меньше номинального)
двигатель потребляет ток, отстающий по
фазе от напряжения питания, и действует
как индуктивная нагрузка; в случае же
перевозбуждения он потребляет ток,
опережающий по фазе напряжение, и
действует как емкостная нагрузка.
Благодаря этой особенности синхронный
двигатель представляет большую ценность
с точки зрения регулирования энергетических
систем. За счет реакции якоря ток,
отстающий по фазе, усиливает возбуждение,
а опережающий - ослабляет его. Как и в
случае генератора, обе реакции
противодействуют изменению возбуждения
и тем самым повышают устойчивость
системы.