

Лаб практикум по СТУ 2009
.pdfгдеW ′(z) не содержит полюсов z = 1. Объединив звенья W(z) и D(z), получим
окончательное выражение для регулятора цифровой системы в виде
|
W (z) |
|
|
|
|
z |
m |
(z −1) |
m−1 |
′ |
|
|
|
|
Wp (z) = |
= |
|
|
|
|
|
W (z)Q1(z) |
|
. (18) |
|||||
1+W (z)D(z) |
z |
m |
(z −1) |
i+ j−1 |
|
|
′ |
|
m−1 |
|
||||
|
|
|
|
|
|
Q1(z) +W (z)P(z)(z |
|
+ ...+ z +1) |
||||||
Анализ ДПФ регулятора (18) позволяет сделать два важных вывода:
1)знаменатель (18) не содержит сомножителя (z-1) даже при j ≥ 1, что подтверждает известный вывод, что при таком способе компенсации запаздывания порядок астатизма системы на рис. 10 определяется количеством интеграторов объекта и практически отсутствует возможность изменить его за счет регулятора;
2)регулятор (18) компенсирует полином Q1(z) объекта, т.е. его полюсы, даже если это не предполагалось при синтезе регулятора W(z).
Очевидно, что такой регулятор неприменим в системах с высокими требованиями к статическим характеристикам, а также для неустойчивых объектов, так как в этом случае компенсация неустойчивых полюсов объекта делает систему негрубой.
Рассмотрим теперь процедуру синтеза методом полиномиальных уравнений для объекта (16), считая в общем случае, что ДПФ объекта содержит как устойчивые, так и неустойчивые нули и полюсы. Выполним факторизацию ДПФ объекта, представив полиномы знаменателя и числителя (16) в виде
Q(z) = Qк(z)Qн(z); P(z) = Pк (z)Pн (z) ,
где Qк(z), Pк(z) и Qн(z), Pн(z) – полиномы от z степени nQк, nPк и nQн, nPн соответственно, содержащие компенсируемые и некомпенсируемые полюсы и нули объекта.
Cинтезируемая система будет оставаться устойчивой при малых изменениях параметров объекта («грубой»), если регулятор не компенсирует неустойчивые нули и полюсы объекта, поэтому все неустойчивые нули и полюсы должны быть отнесены к некомпенсируемой части объекта. Кроме того, известно, что компенсация устойчивых нулей объекта в цифровых системах приводит к возникновению скрытых колебаний координат, а
21
компенсация устойчивых полюсов – к повышенной чувствительности к изменению параметров, но система при этом работоспособна. Поэтому Qк(z) и
Pк(z) могут содержать только устойчивые полюсы и нули объекта, а Qн(z) и
Pн(z) – все неустойчивые и некоторые устойчивые полюсы и нули. Окончательно ДПФ цифрового регулятора компенсационного типа запишем следующим образом:
Wp (z) = |
M (z)Qк(z) |
, |
(19) |
N(z)P (z)(z −1) j |
|||
|
к |
|
|
где M(z) и N(z) – искомые полиномы степени nM и nN соответственно; j – количество интегрирующих звеньев регулятора, обеспечивающих требуемый порядок астатизма i+j замкнутой системы. Из условия физической реализуемости степени искомых полиномов должны удовлетворять равенству
nM + nQк = nN + nPк + j . |
(20) |
Очевидно, что, положив Qк(z) = Pк (z) = 1, из (19) можно получить, как частный случай, ДПФ некомпенсационного регулятора.
Основой для синтеза служит ДПФ замкнутой системы по ошибке:
|
1 |
|
(z−1)i+ j N (z)Q (z) |
|
|
Φε(z)= |
|
= |
|
н |
, |
1+G(z) |
(z−1)i+ j N (z)Q (z)+P (z)M (z) |
||||
|
|
|
н |
н |
|
где G(z)=Wp(z)Wo(z). Степень сомножителя (z – 1) в числителе этой ДПФ определяет желаемый порядок астатизма системы по управляющему воздействию, при этом имеется свобода выбора j. Приравняв знаменатель передаточной функции к желаемому характеристическому полиному замкнутой системы A(z), получим следующее полиномиальное уравнение синтеза:
(z −1)i+ j N(z)Q (z) + P (z)M (z) = A(z). |
(21) |
|
н |
н |
|
Если объект регулирования содержит запаздывание, которое выражается в виде полюсов ДПФ объекта кратности m, равных нулю, целесообразно с целью повышения быстродействия системы отнести сомножитель zm к Qк(z), а
желаемый характеристический полином представить в виде A(z)=zmA1(z). В
22
получаемые при этом регуляторы будут автоматически включены алгоритмы компенсации запаздывания mT.
Выбор степеней полиномов, соответствующих минимальному решению уравнения (21) с учётом условия (20) и обеспечивающих теоретически любое качество регулирования, определяемое A(z), осуществляется по выражениям
nA = 2nQ − nQк + 2i + j −1,
|
|
nN = nQ + i −1, |
|
|
(22) |
|||
|
nM = nQ − nQ к + i + j −1. |
|
||||||
Задание к работе |
|
|
|
|
|
|
|
|
1. Задан объект регулирования с передаточной функцией |
|
|||||||
|
Wo |
( p) = |
|
ko |
|
, |
|
(23) |
|
|
p(To p |
+1) |
|
||||
|
|
|
|
|
|
|
||
который с учетом экстраполятора нулевого порядка имеет ДПФ вида |
|
|||||||
|
W (z) = |
ko( p1z + p0) |
, |
(24) |
||||
|
|
|||||||
|
o |
|
(z −1)(z − d) |
|
||||
|
|
|
|
|||||
где р1 = Т – То + dТо; |
р0 = То – d(То + Т); d = exp(– T / To). |
|
||||||
Для индивидуальных данных, приведенных в лабораторной работе 3 (см. |
||||||||
табл. 6), методом |
полиномиальных |
уравнений выполнить |
синтез |
|||||
компенсационного (с компенсацией устойчивого полюса объекта) цифрового регулятора, обеспечивающего первый порядок астатизма и показатели качества, соответствующие биномиальному распределению корней характеристического уравнения (табл. 7). Принять период дискретности
Т= 0,1То и Т = 0,5То.
2.Ввести в модель объекта (24) запаздывание на период дискретности Т и
выполнить синтез компенсационного регулятора, компенсирующего устойчивый полюс объекта (т.е. Qк (z) = z − d ), при Т = 0,1То и Т = 0,5То.
3. Для объекта с запаздыванием, полученного в п. 2, выполнить синтез компенсационного регулятора, компенсирующего устойчивый полюс объекта и влияние этого запаздывания (т.е. Qк (z) = z(z − d) ), при Т = 0,1То и Т = 0,5То.
23
4. Выполнить моделирование замкнутой системы с полученными регуляторами при единичном ступенчатом воздействии и измерить показатели качества. При необходимости для устранения перерегулирования использовать на входе замкнутой системы фильтр с ДПФ Wф(z) = M (1) / M (z) . Результаты
измерений свести в таблицу.
5. Сделать выводы о работоспособности полученных цифровых систем и влиянии метода синтеза и периода дискретности на качество регулирования.
|
|
Таблица 7 |
|
|
|
nA |
Характеристический полином |
Коэффициенты полинома при |
|
A(z) |
биномиальном распределении корней |
|
|
|
1 |
z – a0 |
a0 = e-ΩΤ |
2 |
z2 – a1z + a0 |
a0 = e-2ΩΤ; a1 = 2e-ΩΤ |
3 |
z3 – a2z2 + a1z – a0 |
a0 = e-3ΩΤ; a1 = 3e-2ΩΤ; a2 = 3e-ΩΤ |
4 |
z4 – a3z3 + a2z2 – a1z + a0 |
a0 = e-4ΩΤ; a1 = 4e-3ΩΤ; a2 = 6e-2ΩΤ; a3 = 4e-ΩΤ |
5 |
z5 – a4z4 + a3z3 – a2z2 + a1z – a0 |
a0 = e-5ΩΤ; a1 = 5e-4ΩΤ; a2 = 10e-3ΩΤ; |
|
|
a3 = 10e-2ΩΤ; a4 = 5e-ΩΤ |
|
|
|
Содержание отчета
1.Название и цель работы, индивидуальные данные.
2.Результаты синтеза регуляторов.
3.Схемы моделирования.
4.Таблица с результатами измерения показателей качества для различных вариантов синтеза и значений периода дискретности.
5.Выводы по работе.
24
Лабораторная работа 5 ИССЛЕДОВАНИЕ МЕТОДИКИ СИНТЕЗА МОДАЛЬНОГО РЕГУЛЯТОРА
Цель работы: изучение методики синтеза модального регулятора.
Краткие теоретические сведения
При анализе и синтезе систем в пространстве состояний все переменные, характеризующие систему или имеющие к ней прямое отношение, делятся на входные переменные, представляющие собой управляющие или
возмущающие воздействия ui, выходные переменные yi, представляющие интерес для исследователя, и промежуточные переменные xi или переменные состояния, определяющие динамическое поведение исследуемой системы.
В основе этой формы математического описания лежит представление дифференциальных уравнений в нормальной форме Коши, которое дополняется алгебраическими уравнениями выхода. В векторно-матричной форме эти уравнения записываются следующим образом:
X& (t) = AX(t) + BU(t);
(25)
Y(t) = CX(t) + DU(t),
где A, B, C и D – матрицы коэффициентов размерности (n×n), (n×m), (r×n), (r×m) соответственно; m – число входов; r – число выходов; U(t) – векторфункция управляющих воздействий размерности m; X(t) – вектор-функция переменных состояния размерности n; Y(t) – вектор-функция выходных координат размерности r.
Матрица А характеризует динамические свойства системы, матрицу В называют матрицей управления, она определяет характер воздействия входных переменных U(t) на переменные состояния X(t).
Алгебраическое уравнение связывает выходные переменные Y(t) с переменными состояния X(t) через матрицу связи С. Обычно в системах
25

автоматического управления матрица D = 0, она характеризует непосредственное воздействие входов на выходы.
Рассмотрим линейную систему, записанную в уравнениях переменных состояния:
X& (t) = AX(t) + BU(t);
(26)
Y(t) = CX(t).
Для системы с одним входом и одним выходом переход от ее передаточной функции W(p) к описанию в пространстве состояний осуществляется следующим образом:
1) передаточная функция приводится к виду
|
b |
pn−1 + ... + b p + b |
|
|
|
bn−1 |
p |
n−1 |
+ ...+ |
b1 |
p |
+ |
b0 |
|
|
||||||||||
|
|
|
|
a |
n |
|
|
|
a |
n |
a |
n |
|
||||||||||||
W ( p) = |
n−1 |
1 |
0 |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
||||||
an pn + an−1pn−1 + ...+ a1p + a0 |
|
n |
|
|
an−1 |
|
n−1 |
|
|
|
|
a1 |
|
|
|
|
a0 |
||||||||
|
|
p |
+ |
|
|
p |
+ ... + an |
|
p + an |
|
|||||||||||||||
|
|
|
|
|
|
|
an |
|
|
|
|
|
|||||||||||||
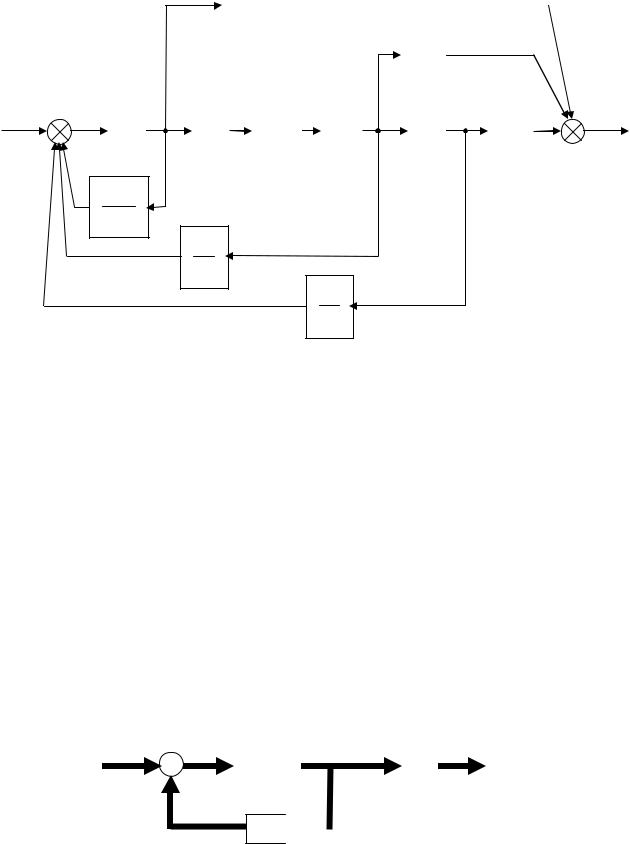
2)после этого ее можно представить в виде структурной схемы рис. 11, которая представляет собой n последовательно соединенных интеграторов;
3)третий этап – это переход от структурной схемы к системе дифференциальных уравнений, по которым составляются матрицы коэффициентов:
|
Отсюда |
|
|
||
æ |
0 |
|
1 |
||
ç |
0 |
|
0 |
||
ç |
|
||||
A = ç |
L |
L |
|||
ç |
|
a |
|
|
a |
ç |
- |
0 |
- |
1 |
|
|
|
||||
ç |
|
an |
|
|
an |
è |
|
|
|
||
ìx&1 = x2; |
|||||
ïx& |
2 |
= x ; |
|||
ï |
3 |
|
|
||
ï |
|
|
|
|
|
íx&n−1 = xn; |
|||||
ï |
|
|
a0 |
|
|
ïx& |
n |
= u - |
x - |
||
|
|||||
ï |
1 |
||||
î |
|
|
an |
||
y(t) = b0 x1 + b1 an an
a1 |
x2 |
-...- |
an−1 |
xn; |
(27) |
an |
|
|
|||
|
|
an |
|
||
x2 + ...+ bn−1 xn. an
|
0 |
|
K |
|
0 |
ö |
|
æ |
0 |
ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|||
|
1 |
|
K |
|
0 |
÷ |
|
ç |
0 |
÷ |
æ b |
|
b |
|
b |
ö |
||
|
|
|
|
ç |
÷ |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
÷ |
|
|
|
|
ç 0 |
1 |
|
n−1 |
÷ |
||
|
|
L |
|
L |
; |
B = ç |
|
÷ ; |
C = ç |
|
|
|
K |
|
÷ . |
|||
|
a |
|
|
|
|
an |
|
|||||||||||
|
2 |
|
|
a |
n−1 |
÷ |
|
çL÷ |
è an |
|
|
an ø |
||||||
- |
|
K |
- |
|
÷ |
|
ç |
1 |
÷ |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
an |
|
|
an |
÷ |
|
è |
ø |
|
|
|
|
|
|
|
|||
|
|
|
ø |
|
|
|
|
|
|
|
|
|
||||||
26
|
|
|
|
|
|
|
|
|
|
bn−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
an |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
u(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
an |
|
|
|
|
|
|
|
|
|
|
|
xn(t) |
|
|
|
|
|
xn-1(t) |
|
|
|
x |
2(t) |
|
|
|
|
x1(t) |
|
|
|
|
y(t) |
||||
1 |
|
1 |
|
|
|
1 |
|
1 |
|
|
b0 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
_ |
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
p |
|
|
p |
|
|
p |
|
|
|
|
|
p |
|
|
an |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
an−1
an
a1
an
a0
an
Рис. 11. Структурная схема объекта, представленная в виде последовательно соединенных интеграторов
Перейдем от дифференциальных уравнений (26) к уравнениям в операторной форме (записанным с помощью оператора Лапласа). Тогда объект можно представить его матричной передаточной функцией
W( p) = |
X( p) |
= ( p1 − A)−1B , |
(28) |
|
U( p) |
||||
|
|
|
где 1 – единичная матрица.
Замкнутая система в пространстве состояний показана на рис. 12 и представляет собой систему с параллельной коррекцией, где R – матрица коэффициентов регулятора размерности m×n.
V(t) |
U(t) |
|
X(t) |
|
Y(t) |
|
|
|
|
W(p) |
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R 
Рис. 12. Структурная схема замкнутой системы в пространстве состояний
27
Матричная передаточная функция замкнутой системы |
|
|||
G( p) = |
X( p) |
= ( p1 − A + BR)−1B . |
(29) |
|
V( p) |
||||
|
|
|
||
Для синтеза модального регулятора объект, описываемый уравнениями (26), должен быть полностью управляемым и наблюдаемым.
Полная управляемость – это возможность перевода объекта из начального состояния X0 в любое наперед заданное положение X при ограниченном управляющем воздействии.
Критерием полной управляемости по вектору состояния является
равенство |
ранга |
его |
матрицы |
управляемости |
вида |
Qу = (B AB |
A2B |
L An−1B) порядку системы n: |
|
||
|
|
|
rank Qy = n. |
|
|
Наблюдаемость – возможность по выходному вектору Y(t) определить вектор состояния X(t).
Критерий наблюдаемости: система, описываемая уравнениями (26),
наблюдаема, |
если |
ранг |
ее |
матрицы |
наблюдаемости |
вида |
Qн = (Cт AтСт (Aт )2Ст |
L (Aт )n−1Ст )равен порядку системы n: |
|
||||
rank Qн = n.
Для объекта с одним входом (m = 1), описываемого системой уравнений (27), модальный регулятор синтезируется следующим образом:
1.Рассматривается система, у которой вектор состояния наблюдаем и совпадает с вектором выхода, т.е. С = 1, тогда Y(t) = X(t).
2.Следует задаться желаемым размещением корней для настройки системы автоматического регулирования. Это может быть биноминальное распределение корней, распределение по Баттерворту, выбор корней по некоторому интегральному показателю качества и т.д.
28
Каждая система, настроенная на определенное размещение корней, характеризуется соответствующим характеристическим полиномом D(p) n-го
порядка. |
|
|
|
|
3. Передаточная функция объекта (28) записывается в виде |
|
|||
W( p) = |
H( p) |
, |
(30) |
|
F( p) |
||||
|
|
|
||
где F( p) = det( p1 − A) – характеристический полином объекта, а H(p) – вектор-
столбец, состоящий из n элементов, который требуется извлечь из (28).
4. Для того чтобы найти коэффициенты регулятора, необходимо характеристическое уравнение замкнутой системы (вывод формулы опущен)
RH( p) + F( p) = 0 |
(31) |
приравнять к выбранному ранее в п. 2 желаемому стандартному полиному n-го порядка
RH( p) + F( p) = D( p). |
(32) |
Конечное уравнение имеет вид |
|
RH( p) = D( p) − F( p) , |
(33) |
из которого непосредственно находятся коэффициенты вектора-столбца R путем приравнивания коэффициентов, стоящих при одинаковых степенях р в левой и правой частях уравнения соответственно.
Задание к работе
1. Задан объект регулирования с одним входом и одним выходом с передаточной функцией
W ( p) = |
|
|
|
b0 |
|
|
. |
|
a p3 |
+ a |
2 |
p2 |
+ a p + a |
0 |
|||
|
|
|||||||
3 |
|
|
1 |
|
||||
Проверить данный объект на полную управляемость и наблюдаемость. Синтезировать модальный регулятор по предложенной выше методике с настройкой на биноминальное распределение корней замкнутой системы, используя данные:
29
Степень полинома D(p) |
Желаемый характеристический |
|
полином D(p) |
1 |
p + Ω |
2 |
p2 + 2Ωp + Ω2 |
3 |
p3 + 3Ωp2 + 3Ω2 p + Ω3 |
4 |
p4 + 5Ωp3 +10Ω2 p2 + 5Ω3 p + Ω4 |
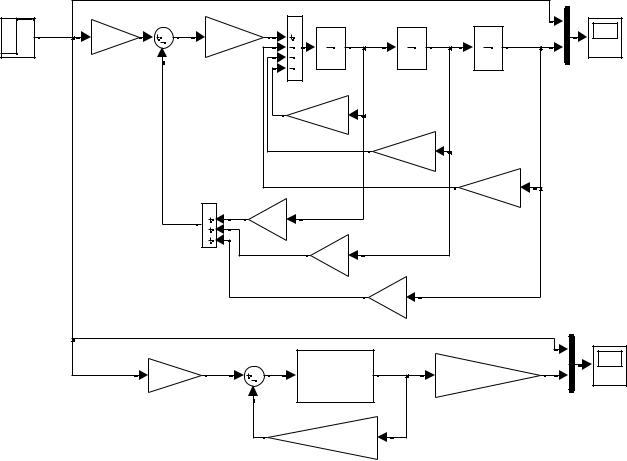
2. Выполнить моделирование замкнутой системы с регулятором при ступенчатом единичном воздействии в двух случаях:
∙собрав структурную схему в развернутом виде в Simulink;
∙собрав структурную схему в матричном виде, используя блок StateSpace и усилительное звено в виде вектора-строки (рис. 13).
3. Сравнить результаты. Сделать выводы о работоспособности системы. Индивидуальные данные по каждому варианту приведены в табл. 8.
|
v(t) |
u(t) |
|
|
x3 |
|
x2 |
|
x1=y(t) |
|
w^3 |
b0/a3 |
|
1 |
1 |
1 |
|||
|
|
|
|
|
|||||
Step |
Gain |
Gain1 |
|
s |
|
s |
|
s |
Scope |
|
Integrator |
|
Integrator1 |
|
|||||
|
|
|
|
|
Integrator2 |
||||
|
|
|
|
a2/a3 |
|
|
|
|
|
|
|
|
|
Gain2 |
|
a1/a3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain3 |
|
a0/a3 |
|
|
|
|
|
|
|
|
|
||
|
|
|
r3 |
|
|
|
|
Gain4 |
|
|
|
|
Gain5 |
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain6 |
|
r1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain7 |
|
|
|
|
|
w^3 |
|
x' = Ax+Bu |
|
[1 0 0]* u |
|
||
|
|
|
y = Cx+Du |
|
|
||||
|
|
|
|
|
|
|
Scope1 |
||
|
|
Gain8 |
|
|
|
|
|
Gain9 |
|
|
|
|
State-Space |
|
|
|
|||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
[r1 r2 r3]* u |
|
|
|
||
|
|
|
|
Gain10 |
|
|
|
|
|
Рис. 13. Схема модели
30