

осн. киб лекц
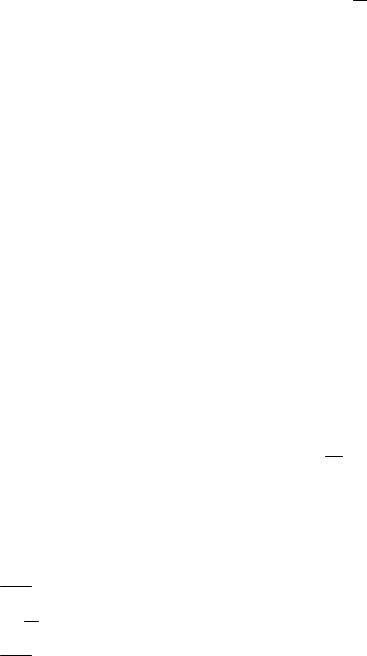
.pdfС точки зрения качества процесса регулирования в замкнутой АСР пропорционально-дифферен- циальный регулятор обладает особенностями обоих законов регулирования (рис. 5.61). Наличие воздействия по производной от ∆y(t) увеличивает быстродействие регулятора, благодаря чему уменьшается динамическая ошибка по сравнению с пропорциональным регулятором.
y |
П |
|
|
yуст |
ПД |
|
|
yзад |
|
0 |
t |
Рис. 5.61 Переходный процесс в АСР с ПД-регулятором
В установившихся режимах, когда ∆y' = 0, регулятор ведет себя как обычный П-регулятор. Величина статической ошибки остается такой же, как и в случае применения П-регулятора, действительно:
lim y(t) = limsy(s) = lims |
1 |
Wоб(s) |
= |
Kоб |
|
(5.119) |
|||
s 1+Wоб(s)(S1 + S2s) |
KобS1 +1 |
||||||||
t→∞ |
s→0 |
s→0 |
|
|
|||||
5.4.5 ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ ЗАКОН РЕГУЛИРОВАНИЯ
Пропорционально-интегральный закон регулирования описывается уравнением
t |
(5.120) |
xp (t ) = −(S1∆y(t ) + S 0 ∫∆y(τ)dτ) |
|
0 |
|
и представляет собой параллельное соединение пропорциональной и интегральной составляющих. Динамические характеристики ПИ-регу-лятора:
– передаточная функция
|
|
S |
0 |
|
|
|
|
W(s) = S1 |
+ |
|
|
; |
(5.121) |
||
s |
|||||||
|
|
|
|
|
|||
– частотные характеристики (рис. 5.62):
|
|
|
S |
0 |
|
|
|
АФХ |
W(iw) = S1 |
+ |
|
|
; |
(5.122) |
|
|
|
||||||
|
|
|
iω |
|
|
||
АЧХ |
M(w)= |
S12ω2 + S02 |
; |
(5.123) |
|
|
ω |
|
|

|
|
π |
|
S1ω |
|
|
|
ФЧХ |
ϕ(ω) = |
+ arctg |
. |
(5.124) |
|||
|
|
||||||
|
2 |
|
S0 |
|
|
||
|
|
|
|
||||
Переходная функция (рис. 5.63, а):
h(t) = (S1 1(t) + S0 t). |
(5.125) |
Весовая функция (рис. 5.63, б):
w(t) = (S1δ(t) + S0). |
(5.126) |
M |
а) |
s1 |
ω |
|
|
0 |
|
ϕ |
б) |
Im |
в) |
|
|
|
|
π |
|
ω→ 0 |
W(i ω) |
π |
|
|
|
|
|
|
2ω→∞
0 |
ω |
– s1 0 |
Re |
Рис. 5.62 Частотные характеристики ПИ-регулятора:
а – АЧХ; б – ФЧХ; в – АФХ
–h |
а) –w |
б) |
s1
s0
0 |
|
|
t |
|
|
t |
|
|
0 |
||||
|
||||||
Рис. 5.63 Переходные характеристики:
а – переходная функция; б – весовая функция
Пропорционально-интегральный регулятор сочетает в себе достоинства П- и И-законов регулирования, а именно: пропорциональная составляющая обеспечивает достаточное быстродействие регулятора, а интегральная составляющая ликвидирует статическую ошибку регулирования. Переходный процесс в АСР с ПИ-регулятором изображен на рис. 5.64.
В начале процесса регулирования основную роль играет пропорциональная составляющая, так как интегральная составляющая зависит не только от абсолютного значения, но и от времени. С увеличением времени возрастает роль интегральной составляющей, обеспечивающей устранение статической ошибки, т.е.
|
lim y(t) = lim sy(s) = lim s |
1 |
|
Wоб(s) |
|
= |
||
|
s |
1+Wоб(s)(S1 + S0 |
/ s) |
|||||
|
t →∞ |
s→0 |
s→0 |
(5.127) |
||||
|
|
|
sWоб(s) |
|
|
|||
|
|
= lim |
= 0. |
|
|
|||
|
|
s +Wоб(s)S1s + S0 |
|
|
||||
|
|
s→0 |
|
|
|
|||
Подбором параметров настройки S0 и S1 можно изменять удель-ный вес каждой составляющей. В |
||||||||
частности, при S0 = 0 получается |
П-регулятор, а при S1 = 0 – И-регулятор. |
|
|
|||||

y
|
|
И |
|
|
П |
|
|
ПИ |
0 |
|
t |
|
Рис. 5.64 Переходный процесс в АСР с ПИ-, П- и И-регуляторами
5.4.6 ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ ЗАКОН РЕГУЛИРОВАНИЯ
Пропорционально-интегрально-дифференциальный закон регулирования описывается уравнением
|
|
|
t |
|
|
|
|
|
|
|
||||
|
xp (t) = −(S1∆y(t) + S0 ∫∆y(τ)dτ + S2∆y′(t)) . |
(5.128) |
||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
Динамические характеристики ПИД-регулятора: |
|
|||||||||||||
передаточная функция |
|
|
S0 |
|
|
|
|
|
|
|
|
|
||
|
W(s) = – (S1 + |
|
|
+ S2s). |
|
|
(5.129) |
|||||||
|
s |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
частотные характеристики (рис. 5.65): |
|
|
|
|||||||||||
– АФХ |
W(iw) = –(S1+ |
S0 |
|
+ S2s); |
(5.130) |
|||||||||
iω |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
– АЧХ |
M (ω) = |
S 2ω2 + (S |
|
|
− S |
ω2 )2 |
(5.131) |
|||||||
1 |
|
|
|
|
0 |
2 |
; |
|||||||
|
|
|
|
|
|
|
ω |
|
|
|
|
|||
– ФЧХ |
ϕ(ω) = |
π |
|
|
|
S ω |
|
|
(5.132) |
|||||
|
+ arctg |
|
|
|
1 |
|
. |
|||||||
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
||
|
|
|
S0 − S2ω |
|
|
|
||||||||
Переходные характеристики: переходная функция, при t > 0
весовая функция |
|
|
|
|
|
|
h(t) = –(S1 + S0t + S2 d(t)); |
(5.133) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
w(t) = –(S1 d (t) + S0 |
+ S2 d'(t)). |
|
|
(5.134) |
|
|
||||||||
M |
|
|
а) |
ϕ |
|
б) ω→0 |
|
Im |
в) |
|
||||
|
|
|
|
|
||||||||||
|
|
|
|
|||||||||||
|
|
|
|
3π/ 2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
s1 |
|
|
|
|
π/ 2 |
|
|
– s1 |
|
0 |
Re |
|
||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s2 |
|
ω |
|
|
|
ω |
|
|
|
|
|
0 |
0 |
|
ω→∞ |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
s0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РИС. 5.65 ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ПИД-РЕГУЛЯТОРА: |
|
|||||||||||||
А – АЧХ; Б – ФЧХ; В – АФХ
График переходной функции ПИД-регулятора представлен на рис. 5.66.

– h
s1
0 t
Рис. 5.66 Переходная функция ПИД-регулятора
ПИД-регулятор сочетает в себе достоинства всех трех простейших законов регулирования: высокое быстродействие благодаря наличию импульса по производной от ∆y(t) и отсутствие статической ошибки, которое обеспечивает интегральная составляющая (рис. 5.67).
y И
И
П
ПД
ПИ
ПИД
0 |
t |
РИС. 5.67 ПЕРЕХОДНЫЕ ПРОЦЕССЫ В АСР С РАЗЛИЧНЫМИ ЗАКОНАМИ РЕГУЛИРОВАНИЯ
Необходимо отметить, что применение регуляторов с дифференциальными составляющими, несмотря на их достоинства, не всегда целесообразно, а иногда и недопустимо. Так, для объектов с большим запаздыванием по каналу регулирования бесполезно вводить воздействие по производной от регулируемой величины, так как этот импульс будет поступать в регулятор по истечении времени чистого запаздывания после прихода возмущения, за которое в объекте могут накопиться большие отклонения. Более того, в таких случаях ПДили ПИД-регулятор может "раскачать" объект и система потеряет устойчивость.
5.5 Тренировочные задания
1 Звеньями называются отдельные элементы системы, в которых происходит преобразование входных сигналов в выходные. Если передаточная функция звена имеет вид простой дроби, то такое звено относится к группе типовых или элементарных звеньев, уравнения которых можно получить из дифференциального уравнения
a2 y′′(t) + a1 y′(t) + a0 y(t) = b1 x′(t) + b0 x(t) ,
приравнивая те или иные коэффициенты нулю.
Различают следующие звенья: усилительное, интегральное, идеальное и реальное дифференцирующие, чистого запаздывания, апериодическое первого порядка, апериодическое второго порядка, колебательное. Каждое из перечисленных звеньев рассматривается с позиций анализа их динамических характеристик.
А Какие звенья описываются обыкновенными дифференциальными уравнениями? В Почему идеальное дифференцирующее звено физически не реализуемо?
С На какие группы делятся типовые звенья?
2 При анализе и синтезе систем автоматического управления широко используется структурный анализ. В любой структурной схеме могут присутствовать только три типа соединений: последовательное, параллельное, соединение с обратной связью. Значение передаточных функций отдельных звеньев позволяет записать передаточные функции соединений и построить их частотные характеристики.
Реальные объекты обладают сложной структурой, в них имеются, так называемые, перекрестные связи, которые необходимо развязать, используя правила преобразования структурных схем.
АКакие передаточные функции можно записать для одноконтурной системы автоматического регулирования?
ВЗаданы передаточные функции звеньев W1(s) = k; W2 (s) = 4Ts1 . Записать частотные характеристики последовательного и параллельного соединений.
СПеренос каких элементов при преобразовании схем производится без дополнительных преобразований?
3 Элементами одноконтурной системы автоматического регулирования являются объект и регулятор. Все законы регулирования подразделяются на простейшие: пропорциональный, дифференциальный, интегральный и промышленные: пропорционально-интегральный, пропорциональнодифференциальный, пропорционально-интегрально-диф-ференциальный. Все законы регулирования рассматриваются с точки зрения их динамических свойств.
А |
Какой из законов регулирования физически не реализуется? |
|
|
|||
В |
Что дает введение в закон регулирования дифференциальной составляющей? |
|
|
|||
С Передаточные |
функции |
регуляторов |
записываются |
со |
знаком |
|
|
"–". Какую информацию дает этот знак? |
|
|
|
||
5.6 Тест
1Какие звенья относятся к группе статических звеньев? А Статическая характеристика отлична от нуля.
В Статическая характеристика не существует. С Статическая характеристика равна нулю.
2Передаточная функция какого звена имеет вид W (s) = T1s ?
А Усилительного.
В Реального дифференцирующего. С Интегрального.
3Передаточная функция апериодического звена первогопорядка…
А W (s) = TsKs+1 . В W (s) = K + Ts1 . С W (s) = TsK+1 .
4Кривая разгона какого звена имеет вид?

h |
|
0 |
t |
|
А Усилительного.
В Апериодического первого порядка. С Апериодического второго порядка.
5 Какое звено описывается уравнением T y'(t) + y(t) = k x'(t) ?
А Апериодическое первого порядка. В Идеальное дифференцирующее. С Реальное дифференцирующее.
6 Каким уравнением описывается колебательное звено?
А T y'(t) + y(t) = k x(t) .
В T1T2 y′′(t) + (T1 +T2 )y′(t) + y(t) = k x(t) . С Tk2 y′′(t) +Tд y′(t) + y(t) = k x(t) .
7 Какую кривую разгона имеет звено чистого запаздывания?
h |
|
А |
h |
В |
h |
|
|
|
|
|
С |
||||
|
|
||||||||||||||
k |
|
|
|
0 |
|
|
|
|
0 |
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
|
t |
|
τ |
|
t |
|
|
t |
||||||
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
8 Какое звено имеет весовую функцию?
w
t
− TK2
А Апериодическое первого порядка. В Реальное дифференцирующее. С Интегральное.
9 Какую весовуюфункцию имеет апериодическое звено первого порядка?
w |
|
А |
|
w |
|
В |
w |
|
С |
||||||
|
|
|
|
||||||||||||
|
|
||||||||||||||
K |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
0 |
|
t |
|
|
|
|||||||
T |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
T |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
0 |
|
t |
− |
|
|
|
0 |
|
t |
||||||
|
|
|
|
||||||||||||
T 2 |
|
|
|
||||||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
10 Какое звено имеет изображенную ниже АФХ?

i Im(ω)
k
0 Re(ω)
А Усилительное. В Интегральное. С Колебательное.
11 Какая АФХ соответствует звену чистого запаздывания?
|
i Im(ω) |
А |
i Im( |
ω |
В |
i Im(ω) |
|
С |
|
|
|
) |
|
||||
|
|
|
0 |
|
Re(ω) |
0 |
|
Re(ω) |
0 |
|
Re(ω) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 Какое звено с соответствующей передаточной функцией относится к группе особых звеньев?
А W (s) = |
k |
|
. |
||
Ts +1 |
|||||
|
|
|
|||
В W (s) = |
k |
|
. |
||
Ts −1 |
|||||
|
|
|
|||
С W (s) = |
|
ks |
|
. |
|
|
Ts +1 |
||||
|
|
|
|||
13 Какое соединение называется параллельным?
А |
|
В |
W1 |
– |
W1 |
|
|
|
W2 |
|
W2 |
С
W1  W2
W2
W3
14 В каком варианте правильно осуществлен перенос узла через звено?
|
|
|
|
|
x |
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(s) |
|
|
|
|
|
|
||||
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
x |
|
|
|
|
|
|
В |
x |
|
|
|
С |
|||
|
|
|
|
|
|
|
|
|
|
|
||||||||
W(s) |
|
y |
|
|
W(s) |
|
|
y |
W(s) |
|
y |
|||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
1/W(s) |
|
|
|
|
W(s) |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 Какой закон регулирования имеет пропорциональный регулятор?

А xp = −S1 ∆y(t) . В xp = −S2 ∆y′(t) .
С xp = −S1 ∆y(t) − S1 ∆y′(t) .
16 Какую АФХ имеет ПИ-регулятор?
А
Im ω→ ∞
ω→ ∞
ω= 0
0 Re
Im |
|
В |
Im |
С |
|
|
|
||
|
|
|||
ω= 0 |
|
|
|
|
ω →∞ |
|
|
ω= 0 0 |
Re |
|
|
|||
|
|
|
||
|
|
|
|
|
0 |
|
Re |
ω→∞ |
|
|
|
|
|
|
17 Какую передаточную функцию имеет ПД-регулятор?
А W (s) = −S1 − S2 s .
В W (s) = − Ss0 − S1 − S2 s . С W (s) = − Ss0 − S1 .
18 Какой переходный процесс будет в АСР с И-регулятором?
y |
А y |
В y |
С |
0 |
t |
0 |
t 0 |
t |
19Какой из законов регулирования наиболее распространен на практике?
АИ-закон.
В ПИ-закон. С П-закон.
20Какой из законов регулирования имеет три настроечных параметра?
АПИ-закон.
В ПД-закон. С ПИД-закон.
6 УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ СИСТЕМ
ВСЯКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДОЛЖНА НОРМАЛЬНО ФУНКЦИОНИРОВАТЬ ПРИ ДЕЙСТВИИ НА НЕЕ СЛУЧАЙНЫХ ПОМЕХ, ШУМОВ ИЛИ, НЕСМОТРЯ НА ДЕЙСТВИЕ РАЗЛИЧНЫХ ПОСТОРОННИХ ВОЗМУЩЕНИЙ, ОНА ДОЛЖНА РАБОТАТЬ УСТОЙЧИВО. В СВЯЗИ С ЭТИМ ЧРЕЗВЫЧАЙНО ВАЖНЫМ ЯВЛЯЕТСЯ ПОНЯТИЕ ОБ УСТОЙЧИВОСТИ ЗАДАННОГО РЕЖИМА РАБОТЫ СИСТЕМЫ. ДЛЯ ЛИНЕЙ-

НЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАДАННЫМ РЕЖИМОМ ПРИНЯТО СОСТОЯНИЕ РАВНОВЕСИЯ.
6.1Понятие устойчивости и ее определение
ВПРОСТЕЙШЕМ СЛУЧАЕ ПОНЯТИЕ УСТОЙЧИВОСТИ СИСТЕМ СВЯЗАНО СО СПОСОБНОСТЬЮ СИСТЕМЫ ВОЗВРАЩАТЬСЯ В СОСТОЯНИЕ РАВНОВЕСИЯ ПОСЛЕ ИСЧЕЗНОВЕНИЯ ВНЕШНИХ СИЛ, КОТОРЫЕ ВЫВЕЛИ ЕЕ ИЗ ЭТОГО СОСТОЯНИЯ. ЕСЛИ СИСТЕМА НЕУСТОЙЧИВА, ТО ОНА НЕ ВОЗВРАЩАЕТСЯ В ИСХОДНОЕ СОСТОЯНИЕ. ТАКИМ ОБРАЗОМ, РАЗЛИЧАЮТ ТРИ ТИПА СИСТЕМ:
1)устойчивые − системы, которые после снятия возмущений возвращаются в исходное состояние равновесия;
2)нейтральные − системы, которые после снятия возмущения возвращаются в состояние равновесия, отличное от исходного;
3)неустойчивые − системы, в которых не устанавливается равновесие после снятия возмущений.
НАГЛЯДНО УСТОЙЧИВОСТЬ РАВНОВЕСИЯ ПРЕДСТАВЛЯЕТСЯ СЛЕДУЮЩИМИ РИ-
СУНКАМИ (РИС. 6.1).
Положение равновесия шара характеризуется точкой A0. При отклонении в положение A1 в первом случае шар стремится к положению A0, во втором не стремится к этому положению, в третьем − состояние шара безразлично.
Примером устойчивых систем могут служить все типовые звенья, кроме интегрирующего, которое является нейтральным объектом. Переходные процессы, соответствующие импульсным входным сигналам, для
A1 а) |
A0 A1 б) |
A0 |
в) |
|
A0 |
|
A1 |
||
|
|
|
|
|
Рис. 6.1 Иллюстрация понятия устойчивости:
а – устойчивая система; б – неустойчивая система; в – нейтральная система
x |
а) |
x |
б) |
t |
t |
y |
y |
t |
t |
Рис. 6.2 Переходные процессы при импульсном возмущении:
А − АПЕРИОДИЧЕСКОЕ ЗВЕНО ПЕРВОГО ПОРЯДКА; Б − ИНТЕГРАЛЬНОЕ
апериодического звена первого порядка и интегрирующего выглядят следующим образом (рис. 6.2).

ПРИМЕРОМ НЕУСТОЙЧИВОЙ СИСТЕМЫ МОЖЕТ СЛУЖИТЬ ОБЪЕКТ, ОХВАЧЕННЫЙ ПОЛОЖИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ. ТАК, НЕКОТОРЫЕ ХИМИЧЕСКИЕ РЕАКТОРЫ, В КОТОРЫХ ПРОИСХОДЯТ ЭКЗОТЕРМИЧЕСКИЕ РЕАКЦИИ, ЯВЛЯЮТСЯ НЕУСТОЙЧИВЫМИ ОБЪЕКТАМИ, ТАК КАК ПРИ ПОВЫШЕНИИ ТЕМПЕРАТУРЫ СКОРОСТЬ ХИМИЧЕСКОЙ РЕАКЦИИ УВЕЛИЧИВАЕТСЯ, ЧТО В СВОЮ ОЧЕРЕДЬ ПРИВОДИТ К УВЕЛИЧЕНИЮ ВЫДЕЛЕНИЯ ТЕПЛА РЕАКЦИИ И ПОВЫШЕНИЮ ТЕМПЕРАТУРЫ. В НЕЛИНЕЙНЫХ СИСТЕМАХ ВОЗМОЖНЫ И ДРУГИЕ ТИПЫ СОСТОЯНИЯ.
Рассмотрим следующий пример (рис. 6.3):
B а) |
A0 |
б) |
A0
Рис. 6.3 Полуустойчивые состояния равновесия
Состояние равновесия (рис. 6.3, а) устойчиво лишь до тех пор, пока отклонение не вышло за некоторую границу, определяемую, например, точкой B. Выйдя за нее, шар уже не вернется в точку A. Второй случай (рис. 6.3, б) характеризует принципиально возможное состояние равновесия для нелинейных систем, которое называется полуустойчивым.
Рассматривая нелинейные системы, вводят понятия устойчивости "в малом", "в большом" и "в целом":
− система устойчива "в малом", если лишь констатируется факт наличия области устойчивости, но границы ее не определены;
− система устойчива "в большом", когда определены границы области устойчивости, т.е. определены границы области начальных отклонений, при которых система возвращается в исходное состояние;
− система, которая возвращается в исходное состояние при любых начальных отклонениях, называется устойчивой "в целом". Для некоторого класса систем устойчивость "в целом" называется абсолютной устойчивостью.
СЛУЧАЙ, ИЗОБРАЖЕННЫЙ НА РИС. 6.1, А, СООТВЕТСТВУЕТ УСТОЙЧИВОСТИ "В ЦЕЛОМ", А НА РИС. 6.3, А – ЛИБО "В БОЛЬШОМ", ЛИБО "В МАЛОМ". В РАССМОТРЕННОМ ПРИМЕРЕ С ШАРОМ ВОПРОС ОБ УСТОЙЧИВОСТИ РЕШАЕТСЯ ПРОСТО, НО В ОБЩЕМ СЛУЧАЕ НЕ ВСЕГДА ЯСНО, ПРИ КАКИХ УСЛОВИЯХ РАВНОВЕСНОЕ СОСТОЯНИЕ СИСТЕМЫ БУДЕТ УСТОЙЧИВО.
КАК УЖЕ НЕОДНОКРАТНО ОТМЕЧАЛОСЬ, ЛИНЕЙНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ В ОБЩЕМ СЛУЧАЕ ОПИСЫВАЕТСЯ ЛИНЕЙНЫМ ДИФФЕРЕНЦИАЛЬНЫМ УРАВНЕНИЕМ С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ (3.8) И НАЧАЛЬНЫМИ УСЛОВИЯМИ (3.9).
Регулируемая величина y(t) представляет собой решение уравнения (3.8):
y(t) = yсв(t) + yвын(t). |
(6.1) |
ОТНОСИТЕЛЬНО СОСТАВЛЯЮЩИХ YСВ(T) И YВЫН(T) РЕШЕНИЯ (6.1) ПОДРОБНО ГОВОРИЛОСЬ В П. 3.4. ПРИ РАССМОТРЕНИИ ВОПРОСОВ УСТОЙЧИВОСТИ ИНТЕРЕС ВЫЗЫВАЕТ ТОЛЬКО СВОБОДНАЯ СОСТАВЛЯЮЩАЯ, ОПРЕДЕЛЯЕМАЯ ОБЩИМ РЕШЕНИЕМ ОДНОРОДНОГО ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ (3.8) БЕЗ ПРАВОЙ ЧАСТИ. ФИЗИЧЕСКИЙ СМЫСЛ ЭТОЙ СОСТАВЛЯЮЩЕЙ ЗАКЛЮЧАЕТСЯ В ТОМ, ЧТО ЭТО КАК РАЗ ТО РЕШЕНИЕ, КОТОРОЕ ОТЛИЧНО ОТ НУЛЯ ТОЛЬКО В ТЕЧЕНИЕ ПЕРЕХОДНОГО ПРОЦЕССА И ИСЧЕЗАЕТ ПРИ УСТАНОВИВШЕМСЯ РЕЖИМЕ. ВЫНУЖДЕННАЯ СОСТАВЛЯЮЩАЯ ВЫХОДНОЙ ВЕЛИЧИНЫ, ЗАВИСЯЩАЯ ОТ ВИДА ВНЕШНЕГО ВОЗДЕЙ-