

Разработка математических моделей систем локальной автоматики
Температура в пространстве печи зависит от расхода топлива - смеси доменного, коксового и природного газа. Связь между расходом газа и температурой может быть смоделирована инерционным звеном первого порядка с нелинейной характеристикой "вход-выход" и постоянной времени TП. Для простоты значение ТП будем считать постоянным.
Пусть
при расходе газа
![]() устанавливается
температура
устанавливается
температура
![]() .
Связь между расходом газа
.
Связь между расходом газа![]() и температурой
и температурой![]() выражается соотношением:
выражается соотношением:
 ,
,
где А, В, С - коэффициенты.
В
меню программ моделирования систем
автоматизированного управления (САУ)
имеются звенья, позволяющие промоделировать
соответствующую зависимость температуры
от расхода газа. Эта зависимость приведена
на рис. 2, в
в относительных координатах. С учетом
известных значений
![]() и
и![]() задания
необходимо перейти от относительных
единиц (рис. 2, в)
к абсолютным (рис. 2, а),
а затем обработать соответствующие
значения
задания
необходимо перейти от относительных
единиц (рис. 2, в)
к абсолютным (рис. 2, а),
а затем обработать соответствующие
значения
![]() с
помощью программы обработки
экспериментальных данных и получить
значения коэффициентов модели для
соответствующего варианта задания. Для
работающей печи (или зоны печи) можно
проанализировать данные записей
различных режимов работы и на их основе
определить статические и динамические
характеристики объекта: зависимость
«вход - выход», постоянную времени, время
запаздывания и т.д.
с
помощью программы обработки
экспериментальных данных и получить
значения коэффициентов модели для
соответствующего варианта задания. Для
работающей печи (или зоны печи) можно
проанализировать данные записей
различных режимов работы и на их основе
определить статические и динамические
характеристики объекта: зависимость
«вход - выход», постоянную времени, время
запаздывания и т.д.
Величина постоянной времени ТП может изменяться в широких пределах - от 60 до 300 с.
Общий вид статической и переходной характеристик представлен на рис. 2, а, б, в.
Таким
образом, зона нагрева представляется
в виде инерционного звена первого
порядка с коэффициентом передачи
![]() и постоянной времениТП:
и постоянной времениТП:
![]()
Коэффициент
![]() является величиной, зависящей от расхода
газа, и может быть определен по формуле:
является величиной, зависящей от расхода
газа, и может быть определен по формуле:
![]()
Для приближенных расчетов можно использовать усредненное значение этого коэффициента, приняв
![]() .
.
Можно также использовать выражение, связывающее расход газа и температуру, полученное при обработке исходных данных задания, продифференцировав его.
Температура в пространстве печи измеряется с помощью радиационного пирометра. Датчик температуры имеет характеристику, близкую к линейной. Коэффициент датчика можно рассчитать по формуле:
![]() .
.
tº tº ТП
2ТП
3ТП 4ТП
Т, t/tmax, Qг
/Q
max
Рис. 2
Здесь
и далее выбраны регуляторы и датчики с
унифицированным сигналом напряжения
![]() ,
равным 10 В. При использовании токовой
ветви в качестве унифицированного
уровня можно использовать принятый
токовый уровень, например 20 мА.
,
равным 10 В. При использовании токовой
ветви в качестве унифицированного
уровня можно использовать принятый
токовый уровень, например 20 мА.
Регулятор
температуры сравнивает уставку
температуры
![]() и
выходное напряжение датчика температуры
и
выходное напряжение датчика температуры![]() .
Выходное напряжение регулятора
.
Выходное напряжение регулятора![]() подастся на систему регулирования
расхода газа. Система состоит из
расходомера (датчика расхода газа),
регулятора расхода и исполнительного
устройства - регулирующего вентиля,
приводимого в движение электродвигателем.
подастся на систему регулирования
расхода газа. Система состоит из
расходомера (датчика расхода газа),
регулятора расхода и исполнительного
устройства - регулирующего вентиля,
приводимого в движение электродвигателем.
Давление
в газовой магистрали
![]() и положение вентиля
и положение вентиля![]() будут определять расход газа
будут определять расход газа![]() .
Для упрощения расчетов положение вентиля
будем выражать в относительных
обобщенных координатах. При
.
Для упрощения расчетов положение вентиля
будем выражать в относительных
обобщенных координатах. При![]() = 0 вентиль закрыт, а при
= 0 вентиль закрыт, а при![]() =
1 вентиль открыт полностью. Известно,
что количество подаваемого компрессором
газа (подача) пропорционально частоте
вращения, а давление в пневмосети
пропорционально квадрату частоты
вращения. Отсюда следует, что давление
и подача (или расход) связаны
квадратично, т.е.
=
1 вентиль открыт полностью. Известно,
что количество подаваемого компрессором
газа (подача) пропорционально частоте
вращения, а давление в пневмосети
пропорционально квадрату частоты
вращения. Отсюда следует, что давление
и подача (или расход) связаны
квадратично, т.е.![]() .
.
Кроме
того, расход зависит от положения
задвижки
![]() .
Для простоты примем зависимость
линейной. Соотношение для расчета
значения расхода газа будет следующим:
.
Для простоты примем зависимость
линейной. Соотношение для расчета
значения расхода газа будет следующим:
![]() ,
,
где
![]() -
давление газа (атм).
-
давление газа (атм).
![]() -
положение вентиля,
-
положение вентиля,
![]() - коэффициент
пропорциональности. Давление газа,
как и его калорийность, обеспечиваются
системами регулирования газосмесительной
станции. При недостатке коксового и
доменного газа добавляется природный.
При избытке – природный газ не
используется. Примем давление газа
постоянным. Однако при анализе
работоспособности САР следует допустить
некоторое отклонение давления (на 15-20
% от
номинального) и оценить качество
регулирования расхода топлива при
изменении давления газа.
- коэффициент
пропорциональности. Давление газа,
как и его калорийность, обеспечиваются
системами регулирования газосмесительной
станции. При недостатке коксового и
доменного газа добавляется природный.
При избытке – природный газ не
используется. Примем давление газа
постоянным. Однако при анализе
работоспособности САР следует допустить
некоторое отклонение давления (на 15-20
% от
номинального) и оценить качество
регулирования расхода топлива при
изменении давления газа.
Пусть
при
![]() и
и![]() ,
,![]() ,
тогда
,
тогда![]() .
.
Выходной
сигнал регулятора расхода газа
используется для управления приводом
вентиля. В зависимости от того, какой
тип привода использован в конкретной
САР, связь между выходом регулятора
расхода, скоростью перемещения
вентиля
![]() и его координатой
и его координатой![]() может быть различной и моделироваться
по-разному.
может быть различной и моделироваться
по-разному.
Задача исполнительного устройства заключается в том, чтобы отработать выходной сигнал регулятора и установить рабочий орган объекта (задвижку, клапан и т.д.) в соответствующее этому сигналу положение, т.е. осуществить конкретное управляющее воздействие на объект.
В качестве исполнительных устройств в газовых и воздушных магистралях наиболее распространенными являются устройства типа МЭО (механизм электрический однооборотный). Они представляют собой электродвигатели переменного тока, управляемые бесконтактными реверсивными пускателями (ПБР). Кроме того, в устройстве имеется датчик положения исполнительного механизма, позволяющий контролировать выполнение команды на перемещение рабочего органа. В модели САР исполнительный механизм может быть представлен достаточно точно следующей структурой (рис. 3).
р К Н Х Х Х К КД.П Т р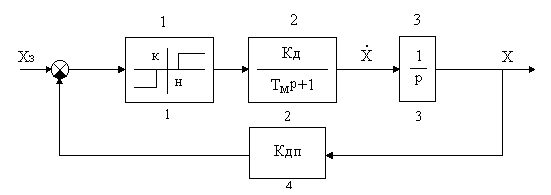

Рис. 3
Здесь
![]() - задание на положение рабочего органа
(задвижки, клапаны, шибера и т.д.). Это
задание может быть выдано оператором
или регулятором. Задание выдается в
виде сходного сигнала с соответствующим
уровнем тока или напряжения, например
от 0 до 20 мА или от 0 до 10 В. Параметрами
- задание на положение рабочего органа
(задвижки, клапаны, шибера и т.д.). Это
задание может быть выдано оператором
или регулятором. Задание выдается в
виде сходного сигнала с соответствующим
уровнем тока или напряжения, например
от 0 до 20 мА или от 0 до 10 В. Параметрами![]() и
и![]() обозначены соответственно скорость
перемещения и перемещение рабочего
органа, которые могут измеряться в
относительных или абсолютных единицах
измерения.
обозначены соответственно скорость
перемещения и перемещение рабочего
органа, которые могут измеряться в
относительных или абсолютных единицах
измерения.
Звено 1 в структуре моделирует работу пускателя. Параметр Н соответствует напряжению управления пускателя, а параметр K – напряжению питания двигателя.
Звено
2 упрощенно моделирует сам электродвигатель
в виде апериодического звена. Коэффициент
![]() связывает напряжение питания и частоту
вращения вала МЭО. Его можно рассчитать
по данным МЭО. Например, МЭО с напряжением
питания 220 В отрабатывает поворот на 90
º за
связывает напряжение питания и частоту
вращения вала МЭО. Его можно рассчитать
по данным МЭО. Например, МЭО с напряжением
питания 220 В отрабатывает поворот на 90
º за![]() .
В этом случае
.
В этом случае
![]()
![]() ,
,
![]()
![]() .
.
Постоянная
времени
![]() зависит от конструкции механизма.
зависит от конструкции механизма.
Звено
3 моделирует переход от скорости
перемещения рабочего органа
![]() к величине перемещения
к величине перемещения![]() .
.
Учитывая,
что
![]() ,
этот переход моделируется интегратором
с ограничением выхода. Ограничения
вводятся в зависимости от используемых
для параметра
,
этот переход моделируется интегратором
с ограничением выхода. Ограничения
вводятся в зависимости от используемых
для параметра![]() единиц измерения, например от 0 до 900,
от 0 до
единиц измерения, например от 0 до 900,
от 0 до
![]() или в относительных единицах от 0 до
1.
или в относительных единицах от 0 до
1.
Звено
4 – датчик положения – осуществляет
преобразование параметра
X
в соответствующий
сигнал обратной связи. Величина
![]() зависит от размерности
зависит от размерности![]() и
и
![]() и
может быть рассчитана по формуле
и
может быть рассчитана по формуле
![]() .
.
Следует
заметить, что при моделировании
исполнительного устройства в относительных
единицах структура модели может быть
упрощена. В этом случае считаем
![]() ,
,![]() ,
,![]() .
Отсюда можно считать, что
.
Отсюда можно считать, что![]() ,
,![]() ,
параметрК
в звене 1 равен
,
параметрК
в звене 1 равен
![]() .
Для рассмотренного выше примера
.
Для рассмотренного выше примера![]() .
Модель примет вид (рис. 4).
.
Модель примет вид (рис. 4).
К Н К Х Х Х р р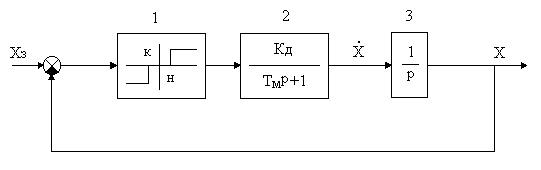
б)
Рис. 4
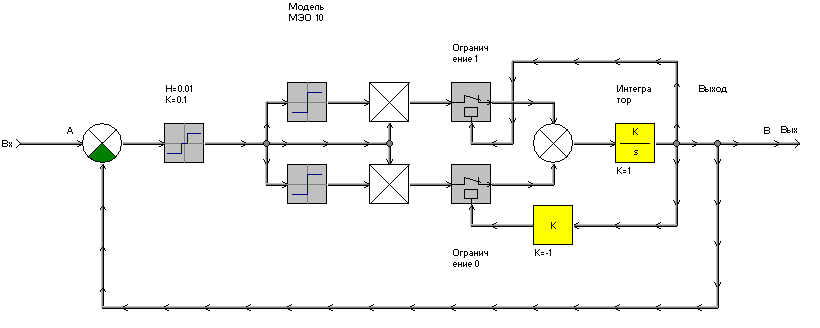
В отдельных случаях можно еще более упростить модель и исключить из нее апериодическое звено 2. Порог срабатывания релейного элемента можно принять в этом случае равным от 0,01 до 0,02. В программе моделирования «Анализ систем 3.1» (в дальнейшем АС 3.1) модель МЭО представляется структурой, представленной на рисунке 4.б.(mc_meo10.sa) Здесь и далее в скобках будет указываться имя файла в программе SYAN (АС 3.1), содержащегося в папке «Печи» являющейся приложением к электронному варианту данного пособия.
В зоне малых отклонений исполнительное устройство можно представить инерционным звеном с постоянной времени Тм = 0,05 τ, где τ – время перемещения МЭО между крайними положениями.
Регуляторы
можно тоже моделировать как в реальных,
так и в относительных параметрах. В этом
случае максимальный выход регулятора
также изменяется в диапазоне от 0 до 1
или
![]() .
При использовании абсолютных единиц,
например унифицированного сигнала
.
При использовании абсолютных единиц,
например унифицированного сигнала![]() и моделировании исполнительного
устройства в относительных единицах,
следует ввести между регулятором и
структурой исполнительного устройства
дополнительный элемент с коэффициентом,
равным отношению
и моделировании исполнительного
устройства в относительных единицах,
следует ввести между регулятором и
структурой исполнительного устройства
дополнительный элемент с коэффициентом,
равным отношению![]() .
Назовем этот коэффициент коэффициентом
согласования
.
Назовем этот коэффициент коэффициентом
согласования![]() .
.
Локальная САР температуры может быть представлена двухконтурной системой регулирования с внутренним контуром регулирования расхода газа и внешним контуром регулирования температуры или одноконтурной системой.
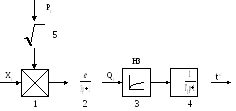
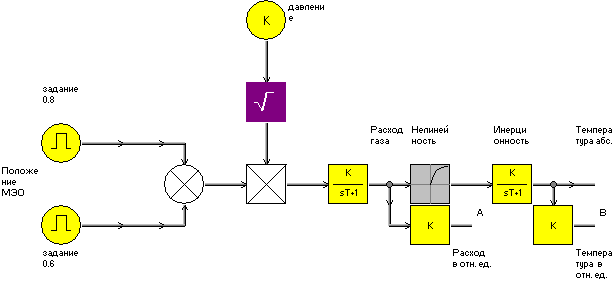
Структурная схема модели объекта в системе регулирования температуры представлена на рис. 5.а , модель в программе АС 3.1 на 5.б (ris5.sa).
![]()
а)
 б)
б)
Рис. 5
Здесь звено 2 связывает положение заслонки ХГ и расход газа QГ , T=0.5-1c, НЗ - нелинейное звено, моделирует связь между QГ и tº, звено 4 учитывает инерционность объекта, звено 5 – квадратичную зависимость между давлением и расходом.
Были использованы следующие данные:
![]() =
1400 °С,
=
1400 °С,
![]() =
0,25 м3/с,
=
0,25 м3/с,
![]() =
3,5 атм (принято постоянным),
=
3,5 атм (принято постоянным),
![]() =
60 с.
=
60 с.
Используя приведенную выше формулу, получим
![]() .
.
Обработав
обобщенную характеристику, связывающую
расход газа и установившуюся
температуру (рис. 2, в)
с учетом значений
![]() и
и![]() ,
получили выражение для звена 3 (рис.
5а).
,
получили выражение для звена 3 (рис.
5а).
![]()
Для моделирования нелинейности в программе QMOD или МВТУ 3.6 в меню можно использовать квадратичную функцию. В программе АС 3.1 используется нелинейность пользователя или программируется блок пользователя DLL.
Моделировалось
два режима. В первом
![]() =
0,8, что
соответствует большей подаче газа
и температуре 1340 °С, а во втором
=
0,8, что
соответствует большей подаче газа
и температуре 1340 °С, а во втором
![]() =
0,6, что сопровождается соответствующим
снижением температуры до 1250 °С. Время
переходных процессов около 300 с. Результаты
приведены на рис. 6.
=
0,6, что сопровождается соответствующим
снижением температуры до 1250 °С. Время
переходных процессов около 300 с. Результаты
приведены на рис. 6.
Г
1 2