

T t r r y y
Рис. 6
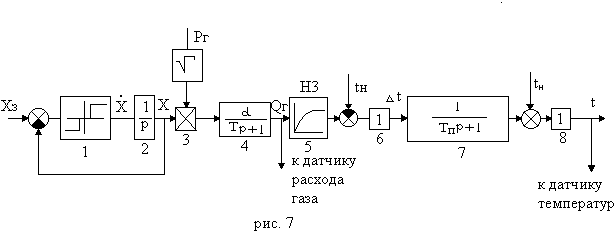
Следующая схема, представленная на рис. 7.а, включает в себя учет начальной температуры печи (для методических печей режим «дежурного газа», обеспечивающий температуру около 600-800 ºС) и исполнительный механизм типа МЭО. Принято время отработки максимального хода, равное 10 секундам.
а) Х Р
 б)
б)
Рис. 7
Учет начальной температуры (принято 600 ºС) осуществляется звеньями 6 и 8. Звено 6 – однополярный усилитель с коэффициентом, равным 1, и ограничением по минимуму выхода, равным 0. До достижения расхода газа, при котором возможен рост температуры, на выходе звена 6 приращение ∆t=0, а затем на входе звена 8 оно суммируется с начальной температурой. Звенья 1 и 2 моделируют МЭО. В звене 1 К=1/10=0,1, Н=0,01 Результаты моделирования приведены на рис. 8. Характер переходных процессов в целом тот же, что и на рис. 6. Процесс нагрева начинается с 600 ºС. Учесть режим «дежурного газа» можно и другим способом, вводя на звено 5 модели внешнее воздействие величиной, соответствующей расходу газа в этом режиме, а на звено 7 - начальное значение температуры. Модель в программе АС 3.1 приведена на рисунке 7.б (ris7.sa).
В
2 1 1 2
Y t t q q
Рис. 8
Контур
регулирования расхода газа изображен
на рис. 9а. Звено 1 моделирует порог
чувствительности регулятора газа.
Объект регулирования в контуре обладает
сравнительно небольшой (по отношению
к постоянной Tп)
инерционностью, связанной в основном
с инерционностью исполнительного
механизма Тм
и постоянной газопровода Т.
Для обеспечения астатизма по возмущению
(изменению давления
![]() )
целесообразно использовать ПИД или
ПИ-регулирование. Передаточная функция
ПИ регулятора будет следующей:
)
целесообразно использовать ПИД или
ПИ-регулирование. Передаточная функция
ПИ регулятора будет следующей:
![]() ,
,
где
![]() - коэффициент ПИ-регулятора газа,
- коэффициент ПИ-регулятора газа,![]() - его постоянная. Постоянная времени
может быть принята равной постоянной
объектаТ,
а коэффициент рассчитан по формуле:
- его постоянная. Постоянная времени
может быть принята равной постоянной
объектаТ,
а коэффициент рассчитан по формуле:
![]() ,
где
,
где
![]()
Формула справедлива, если ТМ значительно меньше Т.
При использовании МЭО с меньшей скоростью перемещения, то есть большей ТМ (МЭО – 25, МЭО 40) целесообразно использовать ПИД регулятор расхода газа. Модель в программе АС 3.1 на рис 9.б (ris9.sa).
Х Х Х Q ЗН Wр.г P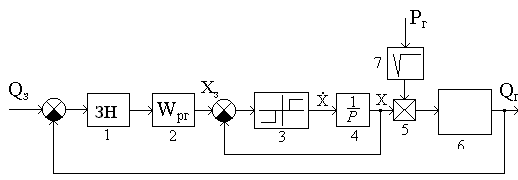
![]()
а)
 б)
б)
Рис. 9
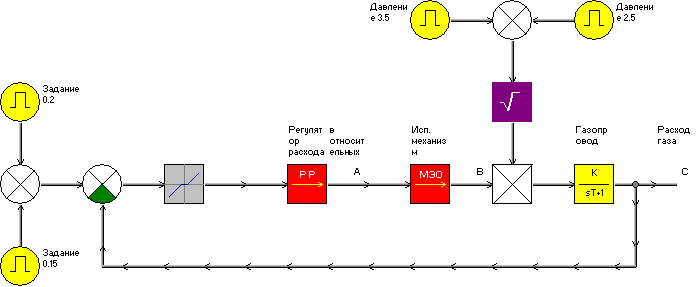
Моделировалось три режима: 1) отработка задания на 0,2 м3/с; 2) отработка задания на 0,15 м3/с; 3) отработка возмущения по давлению с амплитудой от 3,5 атм. до 2,5 атм.
Принято,
как и в предыдущем примере,
![]() (параметр К в звене 3),T=1,
ТМ=0,5
(параметр К в звене 3),T=1,
ТМ=0,5
![]() ,
,
![]() ОтсюдаКР.Г=1/0,133=7,5;
τ=1с.
ОтсюдаКР.Г=1/0,133=7,5;
τ=1с.
Величина зоны нечувствительности в звене 1 (рис. 9) принята равной 0,005.
О
1 2![]() .
Шаг моделирования равен 0,1 с. На графике
(рис. 10) выведены выход регулятора (1),
положение задвижки (2) и расход (3). Динамика
системы вполне удовлетворительна.
.
Шаг моделирования равен 0,1 с. На графике
(рис. 10) выведены выход регулятора (1),
положение задвижки (2) и расход (3). Динамика
системы вполне удовлетворительна.
3
Рис. 10

Отработка
заданий осуществляется за время 10-15 с.
В первых двух режимах, в которых давление
постоянно, графики расхода
![]() и положения регулирующего органа
и положения регулирующего органа![]() по виду совпадают. В третьем режиме,
отличающемся снижением давления с 3,5
до 2,5 атм., для сохранения расхода топлива
задвижка приоткрывается сХ=0,62
до Х=0,69
в относительных единицах.
по виду совпадают. В третьем режиме,
отличающемся снижением давления с 3,5
до 2,5 атм., для сохранения расхода топлива
задвижка приоткрывается сХ=0,62
до Х=0,69
в относительных единицах.
В зависимости от того, насколько детально моделируется эта система, т.е. моделируются ли реальные регуляторы, датчики и исполнительные устройства или же рассматриваются упрощенные варианты, структуры моделей могут быть различны по числу и составу звеньев, а также по их параметрам. В качестве обобщенной схемы модели можно использовать структуру, представленную на рис. 11.
Рассмотрим несколько возможных вариантов моделирования:
1. Все моделируется в относительных единицах:
![]()
![]() ,
Т=1,
Тм=0,5.
,
Т=1,
Тм=0,5.
По расчетам, ПИ-регулятор газа имеет параметры: KР.Г=7,5. Графики приведены на рис. 10. Задание дается в физических единицах измерения расхода, т.е. в м3/с. Шаг принят 0,1 с (ris9.sa).
U
ЗН UО.С Q Х Х Х Р WР.Г К КД.П КД.Г Р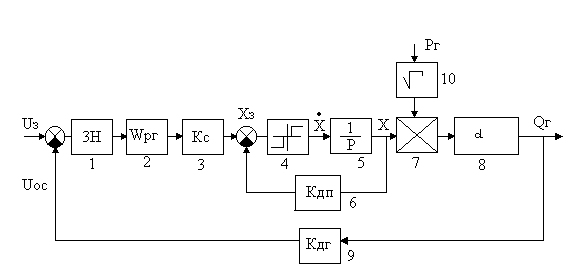
![]()

б)
Рис. 11
2. Исполнительное
устройство моделируется в относительных
единицах, однако регулятор реальный, с
выходом
![]() .
В этом случае коэффициент согласования
.
В этом случае коэффициент согласования![]() KM=1:
K0=KCKMα;
KP=T/2TMKCKMα=75.
График полностью повторяет рис. 10.
Задание выдается также в м3/с
(ris11.sa).
KM=1:
K0=KCKMα;
KP=T/2TMKCKMα=75.
График полностью повторяет рис. 10.
Задание выдается также в м3/с
(ris11.sa).
3. Задание
выдается в вольтах в диапазоне от 0 до
10 В. Регулятор реальный. Датчик
расхода газа имеет коэффициент
![]() .
В этом случае заданию на расход
0,20 м3/с
соответствует
.
В этом случае заданию на расход
0,20 м3/с
соответствует
![]() ,
а расходу в 0,15 м3/с
– 6В. Коэффициент объекта
,
а расходу в 0,15 м3/с
– 6В. Коэффициент объекта
![]()
![]() .
Коэффициент регулятора
KРГ=T/2TМKMαKДГKC=1,88;
τ=1. Звено
1 имеет параметр
.
Коэффициент регулятора
KРГ=T/2TМKMαKДГKC=1,88;
τ=1. Звено
1 имеет параметр
![]() .
Графики те же
(ris11_1.sa).
.
Графики те же
(ris11_1.sa).
Для регулирования
расхода можно использовать и ПИД
регулятор. Примем в качестве объекта
![]() ,
гдеТМ=0,5,
ТД.Г=0,1,
Т=1.
,
гдеТМ=0,5,
ТД.Г=0,1,
Т=1.
Передаточная
функция регулятора расхода
![]()
График регулирования расхода практически не отличается от приведенного на рис. 10 (ris11_2.sa).
Внешним контуром по отношению к контуру регулирования расхода газа является контур регулирования температуры. Схема модели представлена на рис. 12а. Модель в АС 3.1 на рис 12б. (с учетом начальной температуры 600о, ris12.sa).

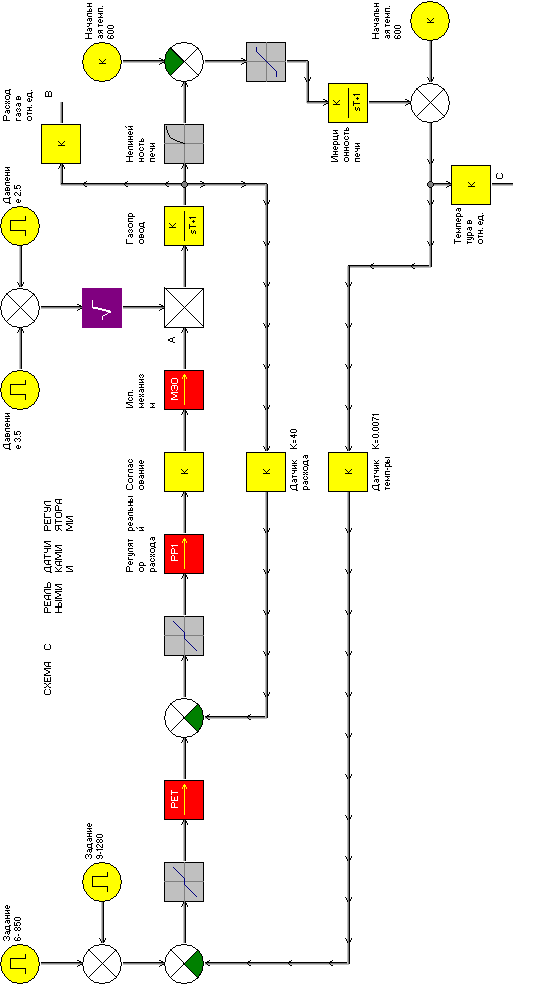

Внутренний контур можно приближённо апроксимировать инерционным звеном первого порядка вида:
![]()
где kД. Г – величина, зависящая от выбранных единиц измерения, Т – постоянная внутреннего контура регулирования расхода газа. В этом случае в соответствии с формулой для определения параметров ПИ-регулятора температуры:
![]() .
.
Учитывая,
что
![]() ,
,![]() ,
,![]() ,
получим:
,
получим:
![]()
Постоянную Т можно определить по результатам анализа динамики контура регулирования расхода газа.
Изменяя задание на 10-15% и анализируя время переходных процессов, можно определить приближенное значение Т по соотношению: Т=(0,25-0,3)ТП.П, где ТП.П – время переходного процесса. Примем Т=3с. Тогда КР.Т=ТП/2Т=60/6=10.
Постоянная
времени ПИ-регулятора температуры по
общей методике равна постоянной объекта,
т.е. равна
![]() .
.
Результаты моделирования трех последовательных режимов представлены на рис. 13. В первом режиме отработано задание на 850 0 (6В), во втором – на 1280 0(9 В), а затем промоделирована реакция на снижение давления с 3,5 до 2,5 атм. При снижении давления регулятор, сохраняя необходимый расход топлива, увеличивает степень открывания газовой магистрали. Расход топлива (1) и температура (2) становятся постоянными.
2
Рис. 13