

Регуляторы с переменной структурой.
Регуляторами с переменной структурой называют приборы, содержащие ключевые (релейные) элементы, которые в соответствие с выбранным законом размыкают или восстанавливают различные каналы передачи информации. Структурная схема такого регулятора меняется в течение переходного процесса таким образом, чтобы обеспечить высококачественное выполнение задач управления.
В общем виде регулятор с переменной структурой можно представить в виде трех функциональных элементов: измерительного устройства ИУ, формирователя функции переключения ФФП и блока коммутируемых коэффициентов БК.
Назначение измерительного устройства ИУ состоит в преобразовании сигнала Х0, пропорционального заданному значению регулируемой величины, и сравнении его м с измеренным значением Х регулируемой величины. Сигнал ошибки х1=Х0-Х с выхода блока ИУ поступает на блоки БК и ФФП.
Блок ФФП формирует функцию переключения S. Преобразование структуры регулятора осуществляется в момент перехода через нуль функции S, заданной уравнением:
S =с1х1+с2х2
В блоке ФФП сигнал ошибки х1 дифференцируется и величина х2=dx1/dt поступает на выходной суммирующий усилитель с релейной характеристикой. Требуемое соотношение коэффициентов с1 и с2 обеспечивается введением на второй вход усилителя дополнительного сигнала х1 с соответствующим коэффициентом. Функция S преобразуется выходным усилителем в релейный сигнал Usgns, являющийся выходным сигналом блока ФФП.
Блок БК формирует управляющее воздействие U и осуществляет скачкообразное изменение структуры регулятора в соответствии с логическим законом, записываемым в виде:
![]()
где z, z – коэффициенты каналов регулятора; z – любая из коммутируемых координат х1, y или U.
Этот блок состоит из логических переключающих устройств (ЛПУ), реализующих закон регулирования и выходного сумматора, на котором формируется управляющее воздействие U. В зависимости от вида решаемой задачи в БК могут использоваться от одного до трех ЛПУ. Соответственно этому управляющее воздействие U будет представлять собой комбинацию одного, двух или трех сигналов вида
U= z z
Импульсные регуляторы.
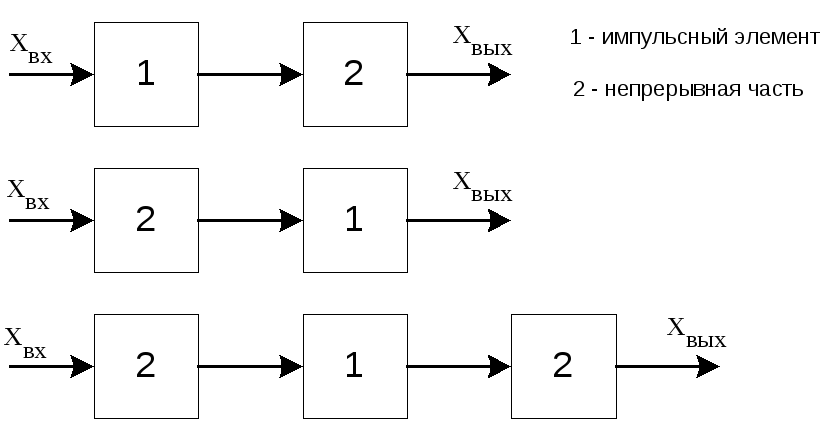
Импульсный регулятор– это регулятор, в структуре которого имеется непрерывная часть и импульсный элемент, преобразующий непрерывно изменяющуюся входную величину в последовательность модулированных импульсов, т.е. таких импульсов, параметры которых изменяются в соответствии с изменением входной величины импульсного элемента.
Импульсный элемент может быть включён:
Модулируемыми параметрами могут быть: амплитуда, широта, фаза импульса.

А – высота импульса;
Тп – время периода;
Ти – ширина подачи импульса;
Тf – время задержки импульса.
Амплитудно-импульсная модуляция (АИМ): модулируемым параметром, зависящим от значения «xвх» в начале очередного периода «Тп», является высота импульса (амплитуда, коэффициент передачи импульсного элемента):
![]()
Широтно-импульсная модуляция (ШИМ): модулируемым параметром, зависящем от «xвх», является ширина (длительность) импульса «Ти» в начале очередного периода.
Время-импульсная или фазоимпульсная модуляция (ФИМ): модулируемым параметром является величина запаздывания импульса Тf относительно начала очередного импульса.
Частотно-импульсная
модуляция (ЧИМ): модулируемым параметром
является частота следования импульсов
«![]() ».
».
ШИМ:
![]() ;
ФИМ:
;
ФИМ:![]() ;
ЧИМ:
;
ЧИМ:![]() .
.
В непрерывную часть импульсного регулятора входят все элементы обычного регулятора непрерывного действия, в этой части может вырабатываться любой закон регулирования.
Импульсные регуляторы по сравнению с непрерывными регуляторами имеют преимущества, которые обусловлены прерывным характером передачи сигналов между отдельными частями СУ.
1) Возможность многоточечного управления.
2) Многоканальное исполнение линий связи.
3) Повышенная помехоустойчивость.
Импульсные регуляторы применяются для управления объектами с запаздыванием. Когда ОУ многочисленны, характеризуются большими постоянными времени и малыми скоростями изменения, целесообразно управлять такими объектами с помощью одного импульсного регулятора, путём его циклического подключения последовательно к каждому объекту.
Промежуток времени между двумя очередными импульсами используются для обмена дискретными сигналами с другим объектом.
Цифровые регуляторы.
Цифровые регуляторы(ЦР) – это устройства, в которых информация об управляющем сигнале хотя бы в одном из блоков выражается в цифровом коде, и для её обработки используются средства цифровой вычислительной техники.
Для представления сигнала в цифровом коде в регуляторе осуществляется квантование сигнала по времени и уровню.
Достоинства ЦР:
Высокая точность измерения регулируемой величины, которая зависит от числа разряда, используемого цифрового кода.
Возможность использовать в качестве регулирующего устройства УВМ и ЭВМ.
Возможность использования любого закона регулирования.
Способность автоматически обнаруживать и исправлять ошибки и искажения, возникающие в результате обработки сигнала.
Возможность использования в многоканальных СУ.
Работа ЦР определяется его динамическими свойствами.
Структурная схема ЦР.
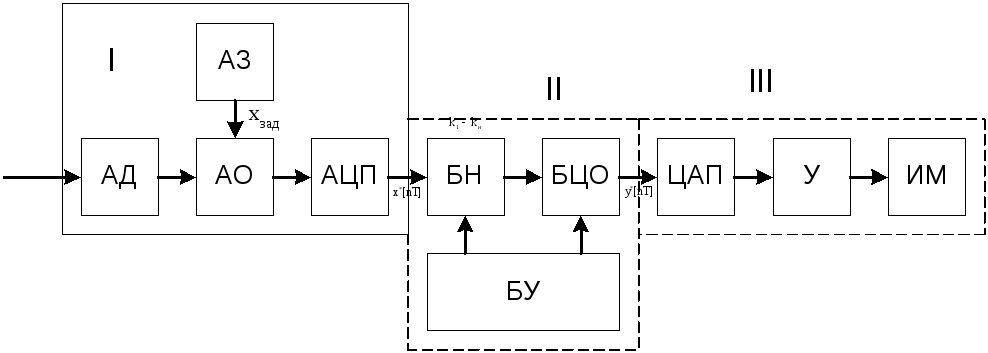
I
– входное устройство: совокупность
блоков, предназначенных для получения
электрического сигнала, пропорционального
текущему и заданному значению регулируемой
величины. Сравнения этих сигналов и
получение в цифровой форме сигнала
ошибки: «![]() ».
Текущее значение регулируемой величины
определяется при помощи АД – аналоговый
датчик.
».
Текущее значение регулируемой величины
определяется при помощи АД – аналоговый
датчик.
Выходной
сигнал, с которого поступает в виде тока
или напряжения на вход аналогового
блока отклонения – АО и сравнивается
в нём с сигналом аналогового задатчика
– АЗ. С выхода блока «АО» сигнал отклонения
в аналоговой форме поступает на вход
аналогового цифрового преобразователя
– АЦП, в котором осуществляется его
квантование по уровню и по времени, т.е.
вырабатывается сигнал в цифровой форме:
«![]() »,
поступающий на вход вычислительного
устройстваII.
»,
поступающий на вход вычислительного
устройстваII.
II
– вычислительное устройство: представляет
совокупность различных вычислительных
блоков, запоминающих элементов и
логических устройств, которые обеспечивают
вычисление управляющего воздействия
в соответствии с законом регулирования.
БН – блок настройки, предназначен для
хранения коэффициентов настройки. БЦО
– блок цифровых операторов, выполняет
основные операции по вычислению отдельных
составляющих законов регулирования.
БУ – блок управления, обеспечивает
последовательность работы блоков
вычислительного устройства. На выходе
вычислительное устройство выдаёт
управляющий сигнал «![]() »
в цифровой форме, который поступает на
вход выходного устройства.
»
в цифровой форме, который поступает на
вход выходного устройства.
III – выходное устройство: состоит из блоков и устройств, при помощи которых осуществляется воздействие на объект регулирования в соответствии с выходным сигналом вычислительного устройства.
Выходное устройство осуществляет преобразование управляющего сигнала «y*» из цифровой формы в аналоговую форму. На входе – цифро-аналоговый преобразователь – ЦАП, осуществляет преобразование цифрового сигнала в аналоговый. Далее сигнал поступает на вход усилителя – У, усиливается и подаётся на вход исполнительного механизма – ИМ, который воздействует на регулируемую величину.
Экстремальный регулятор.
Экстремальный регулятор (ЭР) – автоматическое устройство, обеспечивающее отыскание и поддержание таких значений входных переменных «y1,y2,…,yn» объекта управления, при которых его выходная переменная «x» достигает наибольшего или наименьшего значения.
Применяется в САО – системах автоматической оптимизации.
В отличие от обычных систем регулирования, в САО неизвестно заданное значение регулируемой величины. Задача таких систем сложна и заключается в автоматическом поиске такого управляющего воздействия, которое бы обеспечивало максимум или минимум регулируемой величины. Задача поиска разбивается на две части:
Изучение объекта (определение отклонения от точки экстремума).
Организация движения к точке экстремума.
Экстремальный регулятор с запоминанием экстремума.

Шаговый Экстремальный Регулятор.

ЭР с запоминанием экстремума: реагирует на разность между наибольшим, достигнутым в предыдущие моменты времени значением выходной величины и текущим значением «х».
Экстремальный регулятор включает в себя: запоминающее устройство – ЗУ, которое реагирует только на увеличение величины «х». Устройство реверса – УР, которое представляет собой сигнум-реле, т.е. реле знакоизменения сигнала на выходе объекта управления. Исполнительный механизм – ИМ, элемент сравнения – ЭС, в котором происходит сравнение текущего значения «х» с «хзапом».
Выходная величина ОУ «х» подаётся на ЗУ и запоминается им, если происходит увеличение «х» при воздействии на объект управляющего воздействия «y». Сигнал «хзапом» непрерывно подаётся на ЭС, где сравнивается с текущим значением «х». Сигнал разности «х-хзапом» с выхода ЭС поступает на УР. Если значение разности «х-хзапом» попадает на границу зоны нечувствительности, сигнум-реле срабатывает, производит реверс механизма, который выдаёт управляющее значение «y», при этом с выхода УР сигнал ОС поступает на ЗУ и «хзапом» сбрасывается и происходит запоминание нового значения «х».
Шаговый ЭР: добавили два импульсных элемента – ИЭ. ЗУ играет роль запаздывания. Шаговый регулятор изменяет управляющее значение «y» ступенчато. Первоначально производится принудительное изменение «y»на величину шага «Δy». Значение «х» сравнивается со значением в начале и конце шага. В зависимости от знака разности определяется новое направление изменения регулирующего воздействия «y». Выходная величина «х» подаётся на ИЭ1, здесь происходит квантование величины по уровню. Выходной сигнал с ИЭ представляет собой последовательность импульсов, высота которых пропорциональна текущему значению «х» в дискретные моменты времени.
![]() - период повторения подачи импульса.
- период повторения подачи импульса.
Обозначим
значение «х» в момент времени
![]() через
:
через
:![]() .
Тогда на ЭС будут поступать значения:
«хn-1»
и «хn».
С выхода ЭС получим сигнал разности:
.
Тогда на ЭС будут поступать значения:
«хn-1»
и «хn».
С выхода ЭС получим сигнал разности:
«![]() ».
».
На
сигнум-реле поступает сигнал «![]() ».
Если «
».
Если «![]() <0»,
то сигнум-реле не меняет направление
движения ИМ, при «
<0»,
то сигнум-реле не меняет направление
движения ИМ, при «![]() >0»
- производит его реверс. ИЭ2 осуществляет
периодическое включение исполнительного
механизма. Изменение входного сигнала
«y»
целесообразно производить быстро, чтобы
время перемещения ИМ за один шаг было
мало, т.е. управляющее воздействие на
объект будет скачкообразное, движение
к рабочей точке экстремума будет
производиться ступенчато.
>0»
- производит его реверс. ИЭ2 осуществляет
периодическое включение исполнительного
механизма. Изменение входного сигнала
«y»
целесообразно производить быстро, чтобы
время перемещения ИМ за один шаг было
мало, т.е. управляющее воздействие на
объект будет скачкообразное, движение
к рабочей точке экстремума будет
производиться ступенчато.
Адаптивные регуляторы.
Многие технологические процессы и агрегаты относятся к классу нестационарных, т.е. их динамические характеристики изменяются во времени. Автоматические системы регулирования, в которых применяются регуляторы с фиксированными параметрами, не обеспечивают высокого качества и устойчивого управления. Поэтому, для управления такими объектами обращаются к принципу адаптивного управления, создавая самонастраивающиеся системы с применением адаптивных регуляторов, которые выполняют на базе элементов цифровой вычислительной техники. Принцип работы самонастраивающихся систем – СНС: для системы задаётся некоторый функционал качества «Qз», который в общем случае зависит от параметров СУ и внешних воздействий. В процессе работы «Qф» изменяется при изменении входных воздействий и динамических характеристик объекта управления.
Самонастройка сводится к решению двух задач:
Стабилизация динамических или статических характеристик СУ, т.е.:
Q = Qзад или Q Qзад
Q – текущее значение функционала качества.
Оптимизация динамических или статических характеристик СУ, т.е.:
Q = Qmin
Отыскание оптимума «Q» осуществляется путём поиска, при этом вектору управления или вектору перенастраиваемого параметра регулятора задаётся приращение и оценивается отклонения меры качества, в зависимости от которого осуществляется соответственное изменение этих векторов.
СНС , работающие по этому принципу – поисковые.
На практике чаще применяется безпоисковые СНС, в которых обеспечение условий «Q = Qз» или Q = Qmin осуществляется на основе принципа управления по отклонению или по возмущению с использованием эталонной модели основного контура управления, которая включает: ОУ и регулятор с настраивающимися параметрами.