

Характеристики исполнительных механизмов.
Исполнительные механизмы реализуют различные звенья, как правило с нелинейными статическими характеристиками.
-
1. Мембранный исполнительный механизм



2. Поршневой исполнительный механизм



3. Электромеханический исполнительный механизм с импульсным управлением.



– имеют линейную характеристику 1 (идеальная). Перемещение вала исполнительного механизма от давления с крутизной, зависящей от площади мембраны и жесткости пружины. Wмим аппроксимируется П-звеном с Км . Реальные характеристики МИМ в общем нелинейны 2 в области с большими значениями параметра Х.
– ПИМ, в идеале имеют интегральную характеристику 3, перемещение вала исполнительного механизма от перепада давления р на поршне, хотя реальные ПИМ отличаются от идеальных – кривая 4.
– ЭИМ постоянной скорости (Vим). Статическая характеристика является релейной, с зоной нечувствительности 5 или с зоной нечувствительности и зоной неоднозначности 6. Вследствие значной нелинейности этих устройств, только импульсное управление позволяет получить квазилинейные характеристики, которые выражаются ОПФ интегрирующего звена. Т – период подачи импульса, т.е.
 ,
где
,
где - длительность импульса и паузы.
- длительность импульса и паузы.
Из
данных таблицы видно, что реальные
статические характеристики исполнительных
механизмов являются нелинейными. Ведение
Ж.О.С. в системы с нелинейными
характеристиками исполнительного
механизма позволяет при произведении
![]() получить динамику идеального П-звена,
т.е. введение О.С. позволяет произвести
линеаризацию характеристик исполнительного
механизма.
получить динамику идеального П-звена,
т.е. введение О.С. позволяет произвести
линеаризацию характеристик исполнительного
механизма.
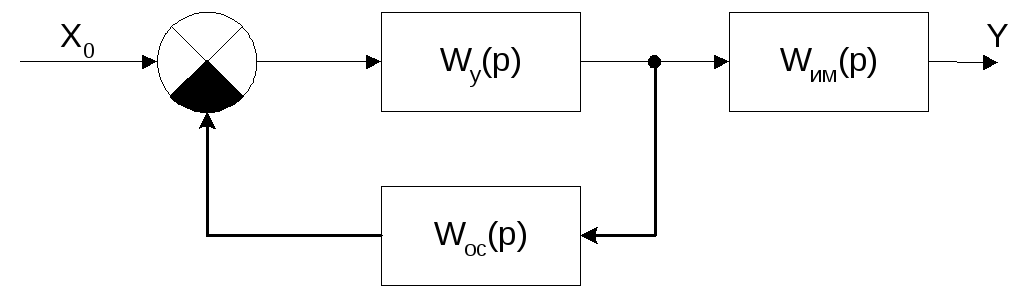
Структурные схемы, включающие исполнительные механизмы.
 а)
а)
 б)
б)
 в)
в)
Схема а) позволяет получить идеальное П-звено.
Схема
б) система с введением ОС только на
управляющую часть. Следует выбирать
закон регулирования в управляющей части
с учетом ОПФ ИМ. Если необходимо получить
ПИ-закон управления, а ИМ поршневого
типа с ОПФ И-звена, то ОПФ звена ОС должно
соответствовать А-звену 1-го порядка:
![]() ,
,![]()
Схема в) введение ОС только на исполнительную часть позволяет улучшить линейность системы, особенно при введении ЖОС. Тогда ИМ реализует П-звено, управляющая часть должна полностью реализовывать требуемый закон регулироваия.
Гидравлические ИМ.
Поршневого
и лопастного типа. В ГИМ перестановочное
усилие создается за счет действия
давления жидкости на мембрану, поршень,
лопасть. Давление жидкости в них: (![]() )103
кПА.
)103
кПА.
Поршневого типа:
ПИМ
поступательного типа состоят из цилиндра
2, внутри которого движется поршень со
штоком 3. Для перемещения поршня нужно
преодолеть силы трения F1,
нагрузку на штоке R1
и противодавление жидкости с другой
стороны поршня. Условие движения:
![]() ,
где
,
где
S – площадь поршня
Р – давление жидкости на поршень, направленное в сторону движения
Рn – противодавление жидкости со стороны слива.
Тогда
скорость движения поршня:
![]() ,
гдеQ
– объемный расход жидкости.
,
гдеQ
– объемный расход жидкости.
Скорость
перемещения поршня:
![]() ,
гдеY
– величина перемещения штока
пропорционально Q.
Это входная величина, которая регулируется
элементом 1 – подвод масла. Такие ИМ
относятся к И-звену:
,
гдеY
– величина перемещения штока
пропорционально Q.
Это входная величина, которая регулируется
элементом 1 – подвод масла. Такие ИМ
относятся к И-звену:
![]() .
.
Лопастного типа:
Такие ИМ сразу обеспечивают на выходе вращательное движение вала. При Р1>Р2 – лопасть поворачивается. Угол поворота: до 3000. Такой ИМ представляет собой цилиндр 1, внутри которого вращается лопасть 2. Рабочая жидкость поступает через каналы, расположенные по обе стороны от лопасти.
Достоинства ГИМ:
простота конструкции
надежность аппаратуры в эксплуатации
Недостатки ГИМ:
при удалении на большое расстояние от РУ необходимость установки гидроусилителей
значительная потеря энергии:
 от рабочего перепада Р
от рабочего перепада Р
ГИМ кривошипные с углом поворота 900