

Методичка №2
.pdfПри такій схемі часткового вибору головного елемента по стовпцю загальний алгоритм Гауса не змінюється. Необхідно лише на кожному кроці методу здійснювати сортування по головному елементу.
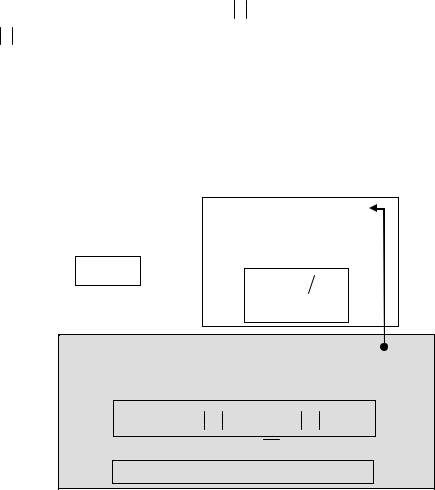
Загальний алгоритм методу Гауса з вибором головного елемента по стовпцю
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для k = |
1, n |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стовпцеві сортування |
|
|||||||||||||||||||
|
для i, j = |
|
|
|
|
|
|
|
|
|
|
|
Yk |
= Pk Vkk |
|
||||||||||||||
|
1, n |
|
|||||||||||||||||||||||||||
Прямий |
|
|
|
|
|
|
|
|
|
|
|
|
для i = |
|
|
|
|
|
|
|
|
|
|||||||
Vi, j |
= Ai, j |
|
|
|
k +1, n |
|
|||||||||||||||||||||||
хід: |
|
|
|
|
|
|
|
|
|
Pi = Pi −Vik Yk |
|
||||||||||||||||||
P = B |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
i |
i |
|
|
|
|
|
|
для |
j = |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
k +1,n |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ckj |
=Vkj Vkk ; |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Vij =Vij −Vik Ckj |
|
||||||||||||||||
|
|
|
|
|
стовпцеві сортування |
|
|||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
max = |
|
Vkk |
|
; w = k |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
для l = |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
k +1, n |
|
|||||||||||||||||||||||
|
|
якщо max < |
|
Vlk |
|
→ { max = |
|
Vlk |
|
; w =l } |
|
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
value = Pk ; |
|
Pk = Pw ; |
Pw =value |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
для d = |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
1,n |
|
|||||||||||||||||||||
|
|
|
value =Vkd ; Vkd =Vwd ; Vwd =value |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Оберне- |
|
|
|
|
|
|
|
|
|
|
|
|
|
для i = |
n −1,1 |
|
|
||||||||||||
X n |
=Yn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
||||||||||
ний хід: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
X i =Yi − ∑Cij X j |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j=i+1 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9

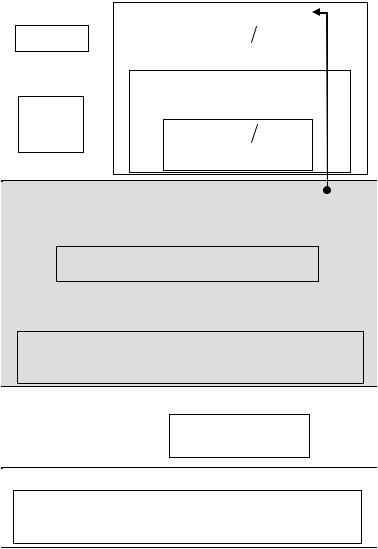
Опис алгоритму
1.Прямий хід методу. Резервуємо (копіюємо) базові матриці A та B у відповідні матриці V та P . Вхідні матриці A та B нам необхідні
для кінцевої перевірки результату. Протягом виконання алгоритму ми працюємо з копіями вхідних матриць.
2.Далі в трьох циклах виконується перетворення початкової матриці A до трикутного вигляду матриці C та відповідне перетворення
правих частин системи B . Зазначимо, що на кожному кроці першого циклу по змінній k виконуємо процедуру стовпцевого сортування по головним елементам. Тобто, відшукуємо максимальне значення по модулю головного елемента, а потім міняємо місцями рядки в матриці V та P (копії матриці A та B ). Змінна w визначає номер рядка головного елемента, а value використовується як проміжна змінна.
3.Обернений хід. Спершу присвоюємо значення для останнього невідомого xn , а потім в циклі відшукуємо усі решта невідомі.
4.Для перевірки вірності роботи алгоритму підставляємо наші знайдені x1 , x2 , ..., xn в систему (1.1). Обчислені ліві частини рівнянь повинні відповідати правим значенням елементів вектора B .
3.2. Метод Гауса з вибором головного елемента по рядку.
При пошуку головного елемента по рядку місцями міняються не рівняння системи (1.1), як при пошуку по стовпцю, а невідомі xi у всіх рівняннях. Наприклад, на першому кроці методу Гауса серед
коефіцієнтів a11 , a12 ,K, a1n |
знайдемо максимальний по абсолютному |
||||||||||||||||||
значенню коефіцієнт. Нехай це буде коефіцієнт |
a1m . Перепишемо |
||||||||||||||||||
систему, переставивши місцями x1 та xm у всіх рівняннях: |
|
||||||||||||||||||
a |
|
x |
m |
+ a x |
2 |
+K+ a x |
+K+ a |
|
x |
n |
= b |
|
|
|
|||||
|
1m |
|
|
|
12 |
11 1 |
1n |
|
1 |
|
|
|
|||||||
a2m xm + a22 x2 +K+ a21 x1 +K+ a2n xn |
= b2 |
|
(3.3) |
||||||||||||||||
|
|
|
|
|
|
|
|
LLLLLLLL |
|
|
|
|
|
. |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
a |
nm |
x |
m |
+ a |
n2 |
x |
2 |
+K+ a |
x |
+K+ a |
nn |
x |
n |
= b |
|
|
|
||
|
|
|
|
|
n1 1 |
|
|
n |
|
|
|
||||||||
Від перестановки місцями доданків у рівняннях розв’язок системи не зміниться. На наступному кроці методу Гауса знаходимо максимальний коефіцієнт серед a22(1) , a23(1) ,K, a2(1n) та знову здійснюємо заміну, і т.д.
10
Після завершення зворотного ходу методу Гауса необхідно знову виконати перестановку xi , тобто впорядкувати елементи вектора X у тому порядку, який був на самому початку.
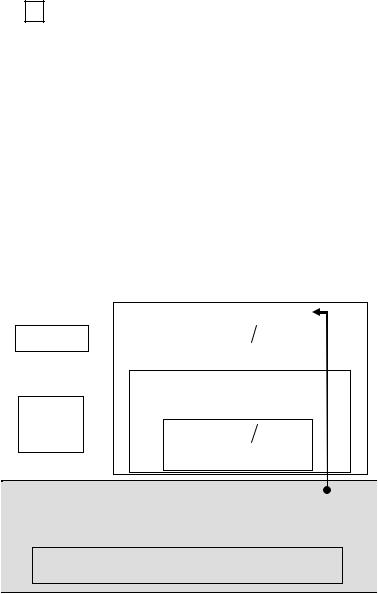
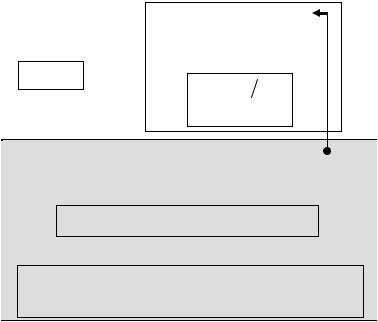
Загальний алгоритм методу Гауса з вибором головного елемента по рядку
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для k = |
|
|
|
|
|
|
|
|
|||||||||||
|
для i = |
|
|
|
|
|
|
|
|
1, n |
|||||||||||||||||||||||||||
|
1, n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
рядкові сортування |
|
|
|||||||||||||||||||||||||||||
|
inxi |
= i |
|
|
|
|
|
|
|
|
|
|
|
Yk = Pk Vkk |
|
|
|||||||||||||||||||||
Прямий |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для i = |
k +1, n |
|
|
|
||||||||||||||||||
для i, j = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
хід: |
1, n |
|
|
|
|
|
|
|
|
|
|
|
Pi = Pi |
−Vik Yk |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
для |
j = |
|
|
|
|
|
|
|
||||||||||||||||||||
|
Vi, j = Ai, j |
|
|
|
|
k +1,n |
|||||||||||||||||||||||||||||||
|
P = B |
|
|
|
|
|
|
|
|
|
|
Ckj =Vkj Vkk ; |
|
||||||||||||||||||||||||
|
i |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vij =Vij |
−Vik Ckj |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
рядкові сортування |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
max = |
|
Vkk |
|
, w = k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
для l = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
k +1, n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
якщо max < |
|
Vkl |
|
→ { max = |
|
Vkl |
|
; w =l } |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
z = inxk ; inxk = inxw ; |
|
inxw = z |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
для d = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
1,n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
якщо d < k →{ value =Cdk ; Cdk |
|
=Cdw ; Cdw = value } |
|
|||||||||||||||||||||||||||||||||
|
інакше |
|
{ value =Vdk ; Vdk =Vdw ; Vdw = value } |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Оберне- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для i = |
n −1,1 |
|
|
|||||||||||||||||
X n |
=Yn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ний хід: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X i =Yi − ∑Cij X j |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j=i+1 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
для i = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Впорядку- |
|
|
|
|
|
|
|
|
|
1, n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
z =inxi ; value = Xi ; Xi = X z ; |
|
|||||||||||||||||||||||||||||
вання xi |
якщо inxi |
|
|
||||||||||||||||||||||||||||||||||
|
≠ i → |
= value; inxi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
X z |
|
|
=inxz ; inxz = z |
|
|||||||||||||||||||||||||
11

Опис алгоритму
1.Задаємо початкові значення вектора inxi =[1, 2,K, n] . Цей вектор містить інформацію про переміщення невідомих xi під час вибору головних елементів.
2.Прямий хід методу. Резервуємо (копіюємо) базові матриці A та B
увідповідні матриці V та P . Вхідні матриці A та B нам необхідні
для кінцевої перевірки результату. Протягом виконання алгоритму ми працюємо з копіями вхідних матриць.
3.Далі в трьох циклах виконується перетворення початкової матриці A до трикутного вигляду матриці C та відповідне перетворення
правих частин системи B . Зазначимо, що на кожному кроці першого циклу по змінній k виконуємо процедуру рядкового сортування по головним елементам. Тобто, відшукуємо максимальне значення по модулю головного елемента, а потім міняємо місцями стовпці в матрицях V та P (копії матриць A та B ). Змінна w визначає номер рядка головного елемента, змінна value використовується як проміжна змінна при заміні значень у елементах матриць V та P , а z як проміжна змінна при заміні значень елементів вектора inxi .
4.Обернений хід. Спершу присвоюємо значення для останнього невідомого xn , а потім в циклі відшукуємо усі решта невідомі.
5.На останньому етапі впорядковуємо значення вектора X у тому порядку, який був на самому початку.
6.Для перевірки вірності роботи алгоритму підставляємо наші
знайдені x1 , x2 , ..., xn в систему (1.1). Обчислені ліві частини рівнянь повинні відповідати правим значенням елементів вектора B .
3.3. Метод Гауса з вибором головного елемента по всійматриці.
У схемі повного вибору головний елемент шукається по всій матриці A
a11x1 +a12 x2 +K+a1q xq +K+a1n xn =b1 |
|
|
|||||||||||
a x |
+a |
x |
+K+a |
x |
+K+a x |
=b |
|
|
|||||
21 1 |
|
22 |
2 |
|
|
2q q |
2n n |
2 |
|
|
|||
|
|
|
LLLLLLLL |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
. |
(3.4) |
|
a x |
+a |
m2 |
x |
+K+ |
a |
mq |
x |
+K+a |
x |
=b |
|||
|
|
||||||||||||
m1 1 |
|
2 |
|
|
q |
|
mn n |
m |
|
||||
|
|
|
LLLLLLLL |
|
|
|
|
||||||
a x |
+a x |
+K+a x |
+K+a x |
=b |
|
|
|||||||
|
|
||||||||||||
n1 1 |
|
n2 2 |
|
|
nq q |
nn n |
n |
|
|
||||
12
На першому кроці методу серед елементів aij визначають максимальний по модулю amq . Перше рівняння системи та рівняння з
номером m міняють місцями. Далі переставляють місцями x1 |
та xq у |
||||||||||||||||||
всіх рівняннях. Після чого система (3.4) стає такою |
|
|
|||||||||||||||||
|
|
xq +am2 x2 +K+am1 x1 +K+amn xn = bm |
|
||||||||||||||||
|
amq |
|
|||||||||||||||||
|
|
|
|
x |
|
|
+a |
|
x |
|
+K+a |
x |
+K+a |
|
x |
|
= b |
|
|
|
a |
2q |
q |
22 |
2 |
2n |
n |
|
|||||||||||
|
|
|
|
|
|
21 1 |
|
|
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
LLLLLLLL |
|
|
|
|
|
(3.5) |
||||
|
a |
x |
|
+a x |
|
+K+a x |
+K+a |
|
x |
|
= b |
. |
|||||||
|
q |
2 |
|
n |
|
|
|||||||||||||
|
|
1q |
|
|
|
12 |
|
11 1 |
1n |
|
1 |
|
|||||||
|
|
|
|
|
|
|
|
|
LLLLLLLL |
|
|
|
|
|
|
||||
|
a |
|
|
x |
|
|
+a |
|
x |
|
+K+a |
x |
+K+a |
|
x |
|
= b |
|
|
|
nq |
q |
n2 |
2 |
nn |
n |
|
|
|||||||||||
|
|
|
|
|
|
n1 1 |
|
|
n |
|
|
||||||||
Як бачимо, цей метод об’єднує методи вибору головного елементу по рядку та по стовпцю. Відповідно наш робочий алгоритм методу Гауса з вибором головного елементу по всій матриці буде гібридом двох попередніх методів.
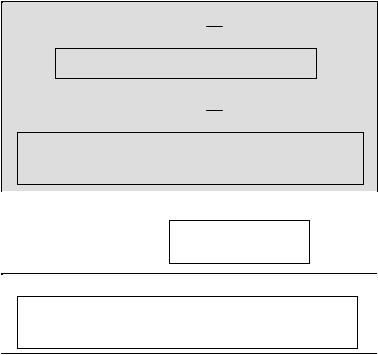
Загальний алгоритм методу Гауса з вибором головного елемента по всій матриці
|
для i = |
|
|
|
|
|
|
|
|
|
|
|
|
|
для k = |
1, n |
|
|
|
|
||||||||||
|
1, n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
матричне сортування |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
inxi |
= i |
|
|
|
|
|
|
|
|
|
Yk = Pk Vkk |
|
|||||||||||||||||
Прямий |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для i = |
k +1, n |
|
|
|
||||||||||
для i, j = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
хід: |
1, n |
|
|
|
|
|
|
|
|
|
|
Pi = Pi −Vik Yk |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
для j = |
|
|
|
||||||||||||||||
|
Vi, j = Ai, j |
|
|
|
|
|
|
|
k +1,n |
|||||||||||||||||||||
|
P = B |
|
|
|
|
|
|
|
|
|
Ckj =Vkj Vkk ; |
|
||||||||||||||||||
|
i |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vij =Vij −Vik Ckj |
|
|||||||||||||
|
|
|
|
|
|
|
матричне сортування |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
max = |
|
Vkk |
|
; h = k ; w = k |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
для l, f = |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
k, n |
||||||||||||||||||||
|
якщо max < |
|
Vlf |
|
→ { max = |
|
Vlf |
|
; h = l ; w = f } |
|
||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13
Обернений хід:
Впорядкування xi
value = Pk ; Pk = Ph ; Ph = value
для d =1,n
value =Vkd ; Vkd =Vhd ; Vhd =value
z = inxk ; inxk = inxw ; inxw = z
для d =1,n
якщо d < k →{ value =Cdk ; Cdk =Cdw ; Cdw = value }
інакше |
|
{ value =Vdk ; Vdk =Vdw ; Vdw = value } |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
для i = |
n −1,1 |
|
|
|
|
|
|
||||
X n =Yn |
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
X i =Yi − ∑Cij X j |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
j=i+1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
для i = |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1, n |
|
|
|
|
|
|
|
|
|
|||
якщо inxi |
|
z =inx |
; value = X |
|
; X |
|
= X |
|
; |
|
|||||
≠ i → |
i |
|
|
|
|
i |
|
|
i |
|
z |
|
|
||
|
|
X z = value; inxi =inxz ; inxz |
= z |
||||||||||||
Опис алгоритму
1.Задаємо початкові значення вектора inxi =[1, 2,K, n] . Цей вектор містить інформацію про переміщення невідомих xi під час вибору головних елементів.
2.Прямий хід методу. Резервуємо (копіюємо) базові матриці A та B у відповідні матриці V та P . Вхідні матриці A та B нам необхідні
для кінцевої перевірки результату. Протягом виконання алгоритму ми працюємо з копіями вхідних матриць.
3.Далі в трьох циклах виконується перетворення початкової матриці A до трикутного вигляду матриці C та відповідне перетворення
правих частин системи B . Зазначимо, що на кожному кроці першого циклу по змінній k виконуємо процедуру матричного сортування по головним елементам. Тобто, відшукуємо максимальне значення по модулю головного елемента, а потім міняємо місцями рядки в матрицях V та P (копії матриць A та B ) та здійснюємо заміну стовпців у матриці V , щоб головний елемент
14
вийшов на верхнє зліва місце. Змінна h та w визначають, відповідно, номер стовпця та рядка головного елемента, змінна value використовується як проміжна змінна при заміні значень у елементах матриць V та P , а z як проміжна змінна при заміні значень елементів вектора inxi .
4.Обернений хід. Спершу присвоюємо значення для останнього невідомого xn , а потім в циклі відшукуємо усі решта невідомі.
5.На останньому етапі впорядковуємо значення вектора X у тому порядку, який був на самому початку.
6.Для перевірки вірності роботи алгоритму підставляємо наші знайдені x1 , x2 , ..., xn в систему (1.1). Обчислені ліві частини рівнянь повинні відповідати правим значенням елементів вектора B .
Усхемі повного вибору головного елемента по всій матриці гарантія доброї обумовленості досягається ціною значних затрат на вибір головних елементів. І тому на практиці у більшості випадках перевага віддається все ж таки схемі часткового вибору головного елемента по стовпцю.
4.Застосування методу Гауса дляобчислення визначників матриць
Нехай маємо деяку матрицю |
|
|
|
|
|
a |
a |
L |
a |
|
|
11 |
12 |
|
1n |
|
|
A = a21 |
a22 |
L a2n . |
(4.1) |
||
L |
L L L |
|
|||
|
an2 |
|
|
|
|
an1 |
L ann |
|
|||
Розглянемо лінійну систему |
|
|
|
|
|
|
A X = 0 . |
|
(4.2) |
||
При розв’язуванні системи (4.2) методом Гауса (п.2) ми |
|||||
здійснювали заміну матриці |
A |
трикутною матрицею |
C , що |
||
складалася з елементів зазначених стрічок, |
|
|
|||
1 c12 |
c13 |
K c1n |
|
|
|
|
|
(1) |
(1) |
|
|
C = 0 |
1 |
c23 |
K c2n |
. |
(4.3) |
K K K K K |
|
|
|||
|
0 |
0 |
K 1 |
|
|
0 |
|
|
|||
|
|
|
|
|
15 |
У результаті ми отримували еквівалентну систему |
|
||
|
матриці C |
C X =0 . |
(4.4) |
Елементи |
послідовно утворювалися |
з елементів |
|
матриці A та |
подальших |
допоміжних матриць A1 , |
A2 , K, An−1 за |
допомогою таких елементарних перетворень: |
|
||
1)ділення на головні елементи a11 , a22(1) , … , ann(n−1) , які передбачалися відмінними від нуля, та
2) віднімання із рядків матриці A та проміжних матриць A1 , A2 , K, An−1 чисел, що пропорційні елементам відповідних
головних стрічок.
При першій операції визначник матриці також ділиться на відповідний головний елемент, при другій – визначник матриці залишається незмінним. Тому
det C =1 = |
|
det A |
|
||
|
|
. |
|
||
a a(1) |
Ka(n−1) |
|
|||
11 |
22 |
nn |
|
||
Отже |
|
|
|
|
|
det A = a a(1) Ka(n−1) |
(4.5) |
||||
11 |
22 |
nn |
|
||
Як бачимо з виразу (4.5), визначник дорівнює добутку головних елементів для відповідної схеми Гауса. До того ж немає потреби здійснювати обчислення для вектора вільних членів B та операції зворотного ходу – вистачає лише прямого ходу методу Гауса.
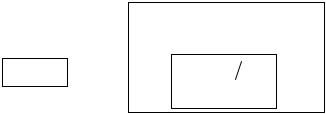
Загальний алгоритм обчислення визначника матриці простим методом Гауса
|
det =1 |
для k = |
1, n |
|
|
||||
|
det = det Vkk |
||||||||
|
|
|
|
|
|||||
|
для i, j = |
|
|
для i, j = |
|
|
|||
Прямий |
1, n |
|
k +1,n |
||||||
хід: |
V |
= A |
Ckj =Vkj Vkk ; |
||||||
|
|||||||||
|
i, j |
i, j |
|
|
|
|
|
||
|
|
|
|
|
Vij =Vij −Vik Ckj |
||||
Опис алгоритму
1.На початку алгоритму змінній det , що відповідає за значення визначника, присвоюємо одиницю. Копіюємо матрицю A у V .
16
2.Виконуємо спрощений прямий хід методу Гауса (без обчислень для вектора B ). На кожному кроці першого циклу по змінній k помножаємо значення визначника на значення головного елементу.
Зазначимо, що якщо будь-який головний елемент akk(k −1) =0 чи
близький до нуля (тягне за собою зменшення точності обчислень), то необхідно використовувати метод Гауса з вибором головного елемента (повну або часткову схему).
При використанні методу Гауса з вибором головного елемента слід врахувати таку деталь: оскільки величина визначника рівна сумі добутків елементів стовпця (рядка) матриці на
(−1)i+ j A ij ,
де A ij – відповідні мінори (у методі Гауса на кожному кроці прямого
ходу у робочому стовпці усі елементи, за винятком першого верхнього, рівні нулю), то слід у формулі (4.5) врахувати знак для кожного головного елемента, який був переміщений з іншого місця матриці.
Загальний алгоритм обчислення визначника матриці методом Гауса з вибором головного елемента по стовпцю
|
det =1 |
|
|
|
|
|
|
для k = |
1, n |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
стовпцеві сортування |
|
|||||||||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
det = det (−1)w+k V |
|
|||||||||
|
для i, j =1, n |
|
|
|||||||||||||||
Прямий |
|
|
|
|
|
|
|
|
|
|
|
|
kk |
|
||||
|
|
|
для i, j |
= k +1,n |
|
|||||||||||||
хід: |
Vi, j |
= Ai, j |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Ckj =Vkj Vkk ; |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Vij =Vij |
−Vik Ckj |
|
|||||||
|
|
|
|
|
стовпцеві сортування |
|
||||||||||||
|
|
|
|
|
max = |
|
Vkk |
|
; w = k |
|
||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
для l = |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
k +1, n |
|
|
|
|
|
|
|||||||
якщо max < Vlk → { max = Vlk ; w =l }
для d =1,n
value =Vkd ; Vkd =Vwd ; Vwd =value
17
Опис алгоритму
1.На початку алгоритму змінній det , що відповідає за значення визначника, присвоюємо одиницю. Копіюємо матрицю A у V .
2.Виконуємо спрощений прямий хід методу Гауса (без обчислень для вектора B ). На кожному кроці першого циклу по змінній k проводимо спочатку стовпцеві сортування для визначення максимального по модулю значення головного елемента та опісля помножаємо значення визначника на значення головного елементу із коефіцієнтом (−1)w+k його місця розташування.
Аналогічно до цього будуються й алгоритми для обчислення визначника матриці на основі методів Гауса з визначенням головного елемента по рядку та по всій матриці. Відрізняються вони лише процедурами сортування.
Загальний алгоритм обчислення визначника матриці методом Гауса з вибором головного елемента по рядку
|
det =1 |
|
|
|
|
|
|
|
|
|
для k = |
1, n |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
рядкові сортування |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
det = det (−1)w+k V |
|
||||||||||||||||
|
для i, j =1, n |
|
|
|
|||||||||||||||||||||||
Прямий |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kk |
|
||||
|
|
|
|
|
|
для i, j |
= k +1,n |
|
|||||||||||||||||||
хід: |
Vi, j = Ai, j |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Ckj =Vkj Vkk ; |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Vij =Vij |
−Vik Ckj |
|
||||||||||||||
|
|
|
|
рядкові сортування |
|
||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
max = |
|
Vkk |
|
; w = k |
|
||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
для l = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
k +1, n |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
якщо max < |
|
Vkl |
|
→ { max = |
|
Vkl |
|
; w =l } |
|
|||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
для d = |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
1,n |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
якщо d < k |
→{ value =Cdk ; Cdk =Cdw ; Cdw = value } |
|
||||||||||||||||||||||||
|
інакше |
{ value =Vdk ; Vdk |
=Vdw ; Vdw = value } |
|
|||||||||||||||||||||||
18 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|