

35. Определение коэффициента коррекции. Получение формулы.
![]()
Из
![]() :
:![]() =
=![]() =
=![]()
Из
![]() :
:![]() =
=![]() =
=![]()
![]() ;
при x=0
→
;
при x=0
→
![]()
При
![]() и
и![]() ,
,![]()
При z<17,
![]()
![]()
Коэффициент
коррекции
![]()
36.Определение толщины зуба по делительной окружности коррегрованных колес. Получение формулы.
Если
число зубьев
меньше 17, то нарезание такого колеса с
помощью рейки зубья у стандартного
колеса окажутся подрезанными, Чтобы не
было подрезания, необходимо вводить
коррекцию:
![]()
В этом случае толщина зуба по делительной окружности окажется больше, чем у стандартного.
![]()
![]()
![]()
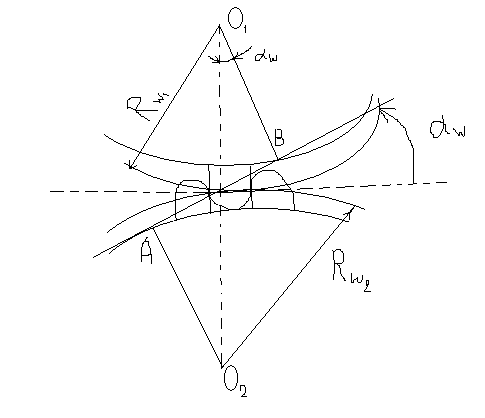
37.Определение угла сборки в зацеплении коррегрованных колес. Вывод формулы. Определение параметров зацепления коррегрованных колес. Получение формул.
![]()
![]()
![]() - шаг
- шаг

![]()
![]()

Сокращаем на
![]() и разрешаем относительно
и разрешаем относительно![]() ,
получаем
,
получаем
![]()
![]()
![]()

для нулевой передачи
(![]() или
или![]() )
монтажный угол :
)
монтажный угол :![]() ,
т.е.
,
т.е.![]()
При сборке двух
коррегрованных колес изменяется не
только
![]() ,
но и межосевое
,
но и межосевое![]()
![]() ,
где
,
где
![]() -
угол сборки
-
угол сборки
![]()
![]()
![]()
![]()
0,25m-радиальный зазор (обязателен)
38. Косозубые передачи. Шевронные колеса, их достоинства.
Прямозубое зацепление, образующие зубья расположены вдоль оси вращения колес, поэтому при входе в зацепление в контакт одного зуба с другим, соприкосновение проходит по всему контакту, следовательно для прямозубых колес получается ???????, большой износ.
![]() -угол
к образующей цилиндра
-угол
к образующей цилиндра
![]()
Коэффициент перекрытия для косозубых передач
![]()
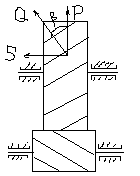
P-величина
![]()
![]()
![]() - стремится сдвинуть
колесо вдоль оси вала
- стремится сдвинуть
колесо вдоль оси вала
Косые зубья
располагаются на цилиндрах обоих колес
по винтовым линиям. Изготавливаются
способом обкатки-качения изотавляемого
колеса по производящей рейке, имеющей
косые зубья, наклоненные под углом
![]()
Кроме передачи окружного усилия в колесах с косыми зубьями появляется осевое усилие. Для устранения этого недостатка применяют колеса с шевронными зубьями. Это как бы 2 косозубых колеса с симметричным расположением зубьев. У этих колес осевые усилия уравновешиваются. Для большего удобства его иногда делают с промежуточным желобком посередине
Шевронное колесо:
П альчиковая
фреза:
альчиковая
фреза:
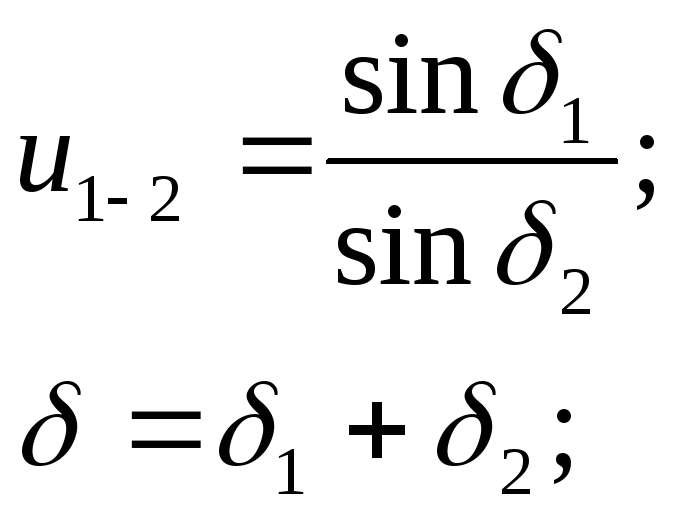
39.Конические зубчатые зацепления. Проектирование. Характеристика.
Конической передачей называется передача с пересекающимися осями вращения звеньев.
Обозначим через
![]() угол
между осями вращения звеньев 1 и 2 ,
которые пересекаются в т.О. Движение
звеньев 1 и 2 в каждое мгновение может
рассматриваться как вращение вокруг
мгновенной оси вращенияOP.
В относительном движении скорость любой
точки на этой оси (напр. P)
равна нулю и, следовательно, абсолютные
скорости точек
угол
между осями вращения звеньев 1 и 2 ,
которые пересекаются в т.О. Движение
звеньев 1 и 2 в каждое мгновение может
рассматриваться как вращение вокруг
мгновенной оси вращенияOP.
В относительном движении скорость любой
точки на этой оси (напр. P)
равна нулю и, следовательно, абсолютные
скорости точек
![]() и
и![]() на
звеньях 1 и 2 равны между собой :
на
звеньях 1 и 2 равны между собой :![]()
![]()
![]()
![]()
![]() передаточное
отношение в пространственных мех. есть
отношение модулей угловых скоростей
звеньев .
передаточное
отношение в пространственных мех. есть
отношение модулей угловых скоростей
звеньев .
Для проектирования конических передач задаётся их суммарный угол .
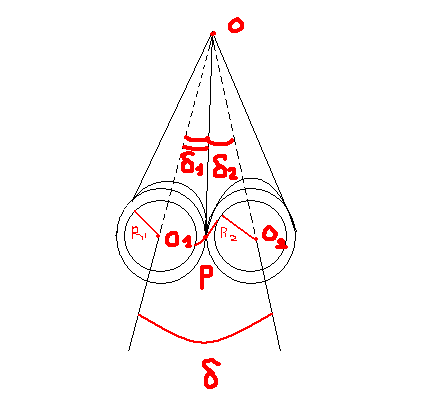
Проектирование
зубчатой передачи начинается с нахождения
![]() и
и![]() .
.
передаточное отношение в зуб. передаче можно также определять через числа зубьев :
![]()
Коническая передача
эквивалентна цилиндрической но с большим
числом зубьев. Изготовление колес
производится методом обкатки . Режущий
инструмент имеет угол конуса 90![]() .
.