

12. Основные характеристики сухого трения. Характеристика трения.
Сухое трение.
Имеет место, когда микронеровности одной поверхности взаимодействуют с микронеровностями другой поверхности
F




![]()

![]()
Схема взаимного
положения поверхностей при сухом трении
Из рисунка видно, что под большим увеличением поверхности трущихся тел, можно обнаружить, что эти повеохности не абсолютно гладкие, а шероховатые.
Если эти поверхности двигать друг отностительно друга, то выступы одной поверхности будут задевать за выступы другой поверхности, Выступы будут деформироваться.
Если в точках касания приложить опорные реакции F, направленные по нормали к элементарным площадкам соприкасания, и разложить их на составляющие, перпендикулярные и параллельные направлению движения, то нормальные составляющие будут уравновешиваться заданными нормальными нагрузками, а касательные составляющие в сумме создадут некоторую силу сопротивления относительному перемещению поверхностей. Эта сила называется силой трения.
Характеристики сухого трения:
Сила треия прямопропорциональна нормальной составляющей реакции.
![]()
f – коэффициент пропорциональности ( обычно определяется экспериментально)
Сила трения покоя всегда боьше силы трения движения
Коэффициент трения движения при установившемся движении является величиной постоянной
Сила трения не зависит от площади соприкасающихся плоскостей
Сила трения покоя зависит от продолжительности неподвмжного контакта соприкающихся тел.

![]() -
продолжительность неподвижного контакта
-
продолжительность неподвижного контакта
![]() - сила
трения покоя при бесконечности (F*)
при бесконечности времени
- сила
трения покоя при бесконечности (F*)
при бесконечности времени
![]() -сила
трения покоя при t0=0
(начало трения движения)
-сила
трения покоя при t0=0
(начало трения движения)
Сила трения всегда направлена против скорости движения
13. Трения в поступательных кинематических парах. Конус трения.


![]()

![]()
Ползун сдвинется с места в тот момент, когда сила F (со штрихом ) достигнет значения
F ( с индексом ТП) и будет иметь место равенство.
![]()
И подставив значения, можно написать.
И з
этой формулы следует, что ползун А
выходит из состояния покоя, когда тангенс
угла
з
этой формулы следует, что ползун А
выходит из состояния покоя, когда тангенс
угла![]() становиться равным или больше коэффициенту
трения покояf
(с индексом П), т.е. когда
становиться равным или больше коэффициенту
трения покояf
(с индексом П), т.е. когда
![]()
Угол
![]() -
угол трения
-
угол трения
Конус трения – внутри, которого при любой приложенной силе, тело остается в покое.
14.Трения качения без скольжения и проворачивания. Коэффициент трения качения.
Для определения трения при качении рассмотрим цилиндр, окруженный силой Q.
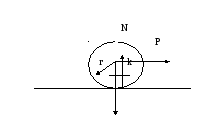
В силу несимметричности распределения напряжений на площадке контакта равнодействующая сила N будет смещена вправо на величину к.
![]()
![]()
без скольжения
![]()
![]()

![]() - коэффициент
трения качения.
- коэффициент
трения качения.
Чтобы цилиндр
скользил без перекатывания необходимо,
чтобы сила
![]() ,
т.е. сила, которая тянет цилиндр, должна
равняться
,
т.е. сила, которая тянет цилиндр, должна
равняться![]()
Чтобы цилиндр не
проворачивался, момент противодействия
![]() должен быть больше, чем вращающийся
момент.
должен быть больше, чем вращающийся
момент.
![]()
![]() - коэффициент
трения покоя.
- коэффициент
трения покоя.
15.Задачи силового исследования. Силы инерции. Точка качания.
Силовой расчет машин и механизмов следует после того, как машина сконструирована, т.е. должны быть известны формы детали, их массы и моменты инерции.
Целью силового расчета является:
Определение усилий во всех кинематических парах.
Определение уравновешивающей силы, приведенной (действующей) к ведущему звену машины.
Определение крутящего момента (если ведущее звено – кривошип) или движущей силы (если ведущее звено – ползун), а также определение мощности на ведущем звене.
Задача силового исследования состоит в том, чтобы изучить влияние внешних сил на появление реакции на кинематических парах. Внешние силы: силы веса, давления, упругие силы, а также силы, возникающие от упругого движения – инерции. Считается, что внешние силы заданы. Силы инерции определяются по известным законам трения. Определению подлежат только силы реакции и трения, которые неизвестны. Методы, используемые при силовом исследовании – графо – аналитические, часть реакции определяется аналитически путем составления и решения соответствующих уравнений. Другая часть неизвестной реакции определяется графически. Определение реакций необходимо для того, чтобы решить задачу прочности работы механизма, т.е. прочности его звеньев, а также для выбора соответствующих подшипников, на их работоспособность и долговечность.
Подшипники в кинематических парах выбираются по максимальным значениям реакций, которые возникают в процессе работы механизма
![]() ,
Каждое звено имеет сложное движение.
,
Каждое звено имеет сложное движение.
![]() ,
где
,
где
![]()
![]() - ускорение центра
масс (тяжести) звена;
- ускорение центра
масс (тяжести) звена;
![]() - масса звена;
- масса звена;
![]() - момент
звена относительно оси, проходящей
через центр тяжести;
- момент
звена относительно оси, проходящей
через центр тяжести;
![]() - угловое ускорение.
- угловое ускорение.
Сила и момент инерции Мu и Рu действуют в сторону противоположную направлению ускорения.
Так как звено – это сложное материальное тело, то силы инерции каждого его отдельного звена могут быть сведены к одной силе инерции, которая называется главным вектором сил инерции и приложена к отдельной точке.
![]() - главный вектор
сил инерции от поступательного движения
звена.
- главный вектор
сил инерции от поступательного движения
звена.
![]() - главный момент
пары сил от вращательного движения
звена вокруг центра масс.
- главный момент
пары сил от вращательного движения
звена вокруг центра масс.
1.Звено движется
поступательно Мu
= 0 и Рu ≠ 0
(т.к.
нет ускоренного
вращательного движения
![]() =0)
=0)
2.Звено вращается вокруг центра масс звена as= 0, с≠0
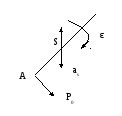
3.Звено вращается вокруг оси, не проходящей через центр масс Мu ≠ 0 и Рu ≠ 0
![]()

4.Звено совершает сложное движение в плоскости Мu ≠ 0 и Рu ≠ 0
Рассмотрим случай 3.
Pu
Найдем результирующую силу, которая заменяет Мu и Рu. Составим уравнение моментов сил относительно точки В и.т.д.
 точка
К – точка качания.
точка
К – точка качания.
![]()
Можно момент от
пары сил инерции не считать, а по формуле
точки качения![]() Рu не
меняя направления и величину. Расчет
вести только с этой силой.
Рu не
меняя направления и величину. Расчет
вести только с этой силой.