

Groda_Prikladnaya_mekhanika
.pdfУчреждение образования «Белорусский государственный технологический университет»
Конспект лекций по дисциплине «Прикладная механика»
раздел 1 «Теоретическая механика»
Для студентов I курса химико-технологических специальностей факультетов ХТиТ, ТОВ, ИДиП и студентов II курса специальности 1-43 01 06 «Энергоэффективные технологии и энергетический менеджмент» факультета ТТЛП.
Лекторы: доцент Грода Я.Г. доцент Бокун Г.С. ст. преп. Гапанюк Д.В.
Минск, БГТУ
2011 г.
Лекция 1
Аксиомы статики.
Условие равновесия сходящейся системы сил
• Введение Механика - наука о механическом движении и взаимодейст-
вии материальных тел.
Механическое движение – процесс изменения взаимного расположения материальных тел в пространстве.
Механическое взаимодействие – взаимодействие при котором тела изменяют характер своего движения либо происходит их деформация. Сила - мера взаимодействия тел либо частей одного и того же тела.
Основная задача механики. – определение положения и скорости тела в любой момент времени если они известны в некоторый начальный момент времени.
Историческая роль механики. Ее место в создании научной кар-
тины мира.
Разделы механики: статика, кинематика, динамика. Способы их изложения.
• Понятие раздела "Статика" и основные определения.
Статика - общее учение о силах и условиях равновесия материальных тел, подверженных их действию. Задачи статики:
1.приведение заданной системы сил к простейшему виду;
2.определение условий равновесия системы сил.
Роль моделей в механики. Модель материальной точки. Модель абсолютно твердого тела. Связь этих моделей с реальным миром.
Сила как векторная величина (модуль, точка приложения, направление). Единицы измерения силы. Понятие линии действия силы.
Понятие системы сил. Виды систем сил: плоские, пространст-
венные; сходящиеся, параллельные.
Понятие свободного тела и принцип освобождения от связей.
Понятие эквивалентных систем сил (если одну системы сил заменить другой, а движение тела не изменится).
Понятие уравновешенной системы сил (под ее действием тело может находиться в покое).
Понятие равнодействующей системы сил (если система сил эквивалентна одной силе то эта сила называется р.) и уравновеши-
2
вающей силы (равна по модулю равнодействующей и направлена в противоположную сторону).
Внешние и внутренние силы.
•Аксиомы статики
1.Если на свободное тело действуют две силы, то оно находится
всостоянии равновесия тогда и только тогда, когда F1=-F2. (модули сил равны и силы направлены в противоположные стороны)
2.Действие системы сил на АТТ не изменится если к этой системе сил добавить или отнять уравновешенную систему сил.
Следствия из аксиом.
1.Сила приложенная к АТТ - скользящий вектор. (Данное следствии е может применяться только к АТТ, пример со стержнем (сжатие, растяжение, равновесие)).
•Равновесие системы сходящихся сил.
Если линии действия всех сил системы пересекаются в одной точке, то такая система сил называется сходящейся.
Главный вектор системы сил - векторная суммы всех сил системы. Различие понятий главного вектора и равнодействующей. Равнодействующая системы сходящихся сил (равна сумме сил и приложена в точке пересечения линий этих сил).
Условие равновесия сходящейся системы сил – главный вектор (равнодействующая) равен нулю.
9 Геометрическая интерпретация условия равновесия: силовой многоугольник замкнут.
9 Аналитическая: сумма проекций на каждую ось 0. Теорема о трех силах – если на твердое тело действуют 3 силы и
тело в равновесии, то силы сходящиеся.
3

Лекция 2
Равновесие произвольной плоской системы сил
•Алгебраический момент силы относительно точки
Алгебраическим моментом силы F относительно точки некоторой точки О называется взятое с соответствующим знаком произведение модуля силы на ее плечо.
MO (F) = ±Fh |
h |
F |
Плечо силы – длина перпендикуляра (крат- |
||
чайшее расстояние) опущенного из точки О на ли- |
О |
|
нию действия силы. |
|
|
Правило выбора знаков: если под действием |
|
|
силы F механическая система стремится повернуть- |
|
|
ся относительно точки О против часовой стрелки, то момент считается положительным, если по часовой - отрицательным.
Единицей измерения момента является 1 ньютон-на-метр.
Момент силы относительно некоторой точки равен 0 если эта точка ле-
жит на линии действия силы.
Теорема Вариньона. Момент равнодействующей равен сумме моментов составляющих (момент суммы сил равен сумме моментов этих сил).
•Пара сил. Момент пары
Парой сил называется система двух равных по величине сил действующих вдоль параллельных прямых в противоположные стороны.
Плоскость, проходящая через линии |
F2 |
действия сил образующих пару, называется |
|
плоскостью пары. Плечом пары d назы- |
d |
вается расстояние между линиями действия |
F1 |
сил пары. Алгебраический момент пары |
равен взятому с соответствующим знаком произведению модуля силы входящей в пару на плечо пары, при этом правило
выбора знаков совпадает с аналогичным правилом для момента силы относительно точки.
Теорема. Момент пары равен сумме моментов сил пары относительно любого центра.
Следствия теоремы: пары имеющие одинаковые моменты являются эк-
вивалентными.
•Распределенная нагрузка
Нагрузка приложенная к некоторому участку механической системы на-
зывается распределенной нагрузкой.
Плоская система распределенных сил характеризуется ее интенсивностью q, т.е. значением силы приходящейся на единицу длины нагруженного участка
([q]=H/м).
4
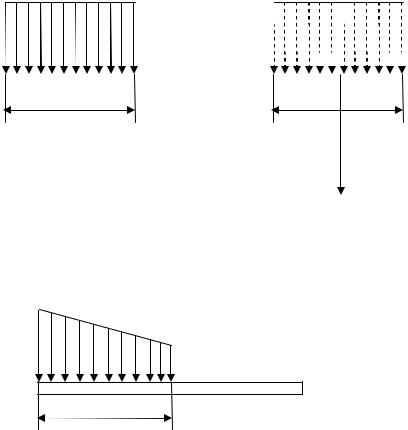
При решении задач статики распределенная нагрузка может быть заменена ее равнодействующей. Рассмотрим определение последней на примере равно-
мерно и линейно распределенной нагрузки
1. Равномерно распределенная нагрузка
q=const |
|
q=const |
|
|
|
|
|
|
l |
|
|
|
|
l |
l |
l |
|
|
|
|
Q = ∫q(x)dx = q∫dx = ql |
|
|
|
Q |
|
0 |
0 |
ql2 |
|
|
|
l |
l |
|
l |
||
m(Q) = ∫q(x)xdx = q∫xdx = |
|
=Q |
|
|
|
2 |
2 |
|
|||
0 |
0 |
|
|
||
|
|
|
|
||
Т.о. можно считать, что равнодействующая равномерно распределенной нагрузки приложена в середине участка рас пределения.
2. Линейно распределенная нагрузка.
qmax
qmin
l
q(x) = q |
− |
qmax −qmin |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
max |
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
l |
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
q |
|
q |
max |
+ q |
|
|||||||
Q = |
|
∫ |
q(x)dx = |
∫ |
|
q |
|
− |
|
|
|
x |
|
dx = q |
max |
l − |
|
l = |
|
min |
|
l |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
max |
|
|
l |
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|||||||
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
m(Q) = l q(x)xdx = l |
q |
|
|
− |
|
q x |
xdx = |
qmax |
l2 − |
q l2 =Q |
l |
+ qmin l2 |
||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
∫ |
|
|
|
∫ |
|
max |
|
|
l |
|
|
|
|
2 |
|
|
3 |
3 |
|
6 |
|||||||
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Если qmin=0 получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Q = |
qmax |
l , |
m(Q) =Q |
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т.о. если нагрузка распределена "по треугольнику" то равнодействующая приложена на расстоянии ⅓l от точки приложения максимальной нагрузки.
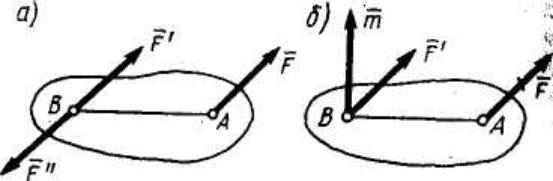
•Приведение системы сил к заданному центру
Теорема о параллельном переносе силы. Силу F, не изменяя ее действия на плоскую фигуру, можно перенести из точки ее приложения в любой центр приведения О, приложив при этом пару сил с моментом m, равным моменту mО этой силы относительно центра приведения.
5
Главным алгебраическим моментом системы сил относительно некото-
рого центра О называется сумма алгебраических моментов сил системы относительно того же центра.
Т.о. из теоремы о параллельном переносе следует, что произвольная плоская система сил эквивалентна силе равной главному вектору системы сил и паре сил с моментом равным главному алгебраическому моменту системы.
Если главный момент системы равен 0 то главный вектор системы сил есть равнодействующая системы сил.
Если главный момент системы не равен 0, а главный вектор системы сил равен нулю, то система сил может быть заменена парой сил с моментом равным главному моменту системы.
Таким образом, произвольная плоская система сил приведена к своему простейшему виду, а значит, применительно к данной системе сил, полностью решена первая задача статики.
6
Лекция 3.
Равновесие произвольной плоской системы сил
•Условие равновесия произвольной плоской системы сил.
Поскольку произвольная плоская система сил приводится к главному вектору и главному моменту, то, очевидно, что для равновесия механической систему необходимо потребовать обращение в ноль двух этих величин.
В координатной форме условия равновесия принимает следующий вид
∑Fix = 0, ∑Fiy = 0, ∑MO (Fi ) = 0
i i i
Данная форма условий равновесия является основной. Помимо этой формы условия равновесия могут быть записаны в следующей форме
9 ∑Fix = 0, ∑M A(Fi ) = 0, ∑M B (Fi ) = 0
i i i
прямая АВ не перпендикулярна оси х
9 ∑M A(Fi ) = 0, ∑M B (Fi ) = 0, ∑MC (Fi ) = 0
i i i
точки А, В и С не лежат на одной прямой
•Случай плоской системы параллельных сил.
9 |
∑Fix = 0, |
∑M0 (Fi ) = 0 ось х параллельна силам |
|
i |
i |
9 |
∑M A(Fi ) = 0, ∑M B (Fi ) = 0 прямая АВ не параллельна силам |
|
|
i |
i |
• Статически определимые и статически неопределимые
механические системы.
Если число уравнений равновесия равно числу неизвестных реакций, то такая система статически определима, если нет – то статически неопределима.
Примеры статически определимых и неопределимых систем – груз висящий на двух и трех нитях, балка опирающаяся на два и три подвижных шарнира, арка с подвижным и неподвижным и двумя неподвижными шарнирами, соответственно.
Для чего применяются статически неопределимые конструкции. Их можно рассчитывать при дополнительном учете деформаций, что и делается в курсе сопромата.
•Равновесие систем тел.
Понятие внешних и внутренних связей. Пример: трехшарнирная арка. Если после отбрасывания внешних связей система остается жесткой, то
для нее задачи статики решаются как для АТТ. Если же нет, то на основании принципа отвердевания сформулированные выше условия будут необходимыми, но не достаточными. Т.е. нельзя будет определить все неизвестные величины. Для решения задачи необходимо получить дополнительные уравнения. Два способа получения таких уравнений
•Пример решения задачи на равновесие системы тел.
7

Лекция 4.
Условие равновесия пространственной системы сил.
• Вектор-момент силы относительно точки и вектор-
момент пары сил.
Вектор – моментом силы F относительно центра О называется векторная величина mO(F) равная векторному произведению радиус-вектора r, проведенного из центра О в точку приложения силы, насамусилу.
mO (F) = r ×F
Отметим следующие свойства момента силы: 1) момент силы относительно центра не изменяется припереносе точки приложениясилы вдоль ее линии действия; 2) момент силы относительно центра О равен нулю или когда сила равна нулю, или когда ли-
ниядействиясилы проходит через центр О (плечо равно нулю).
Нетрудно видеть, что модуль вектор–момента силы относительно точки с точностью до знака совпадает с алгебраическим моментом силы относительно той же точки. Причины использования алгебраического момента для плоских задач.
Теорема Вариньона для вектор–момента оказывается очевидно справедливой и вытекает напрямую из определения понятия вектор – момента и свойств операции векторного произведения.
Аналогичным образом может быть определено понятие вектор–момента пары сил называется как вектора т, модуль которого равен произведению модуля одной из сил пары на ееплечо и который направлен перпендикулярно плоскостидействияпарывтусторону, откудапаравиднастремящейсяповернуть тело против хода часовой стрелки. Снова можно отметить, что модуль и этого вектор–момента с точностью до знака совпадает с алгебраическим моментом.
•Момент силы относительно оси.
Проекция вектора mO(F), т. е. момента силы F относительно центра О, на ка- кую-нибудь ось z, проходящую через этот центр, называется моментом силы F
относительно оси z, т.е. mz (F) = mO (F) cos γ
где mz(F) — момент силы F относительно оси z; γ — угол между вектором
mO(F) и осью z.
Из определения следует, что mz(F), как проекция вектора на ось, является величиной алгебраической, т.е. имеет знак. При этом моментсилыотносительно осибудетиметьзнакплюс, когдасположительногоконцаоси поворот, который стремится совершить сила F, виден происходящим против хода часовой стрелки, и знак минус — когда по ходучасовойстрелки.
8
Момент силы относительно оси может быть определен также следующим образом: момент силы F относительно оси z равен алгебраическому моменту проекции этой силы на плоскость, перпендикулярную оси z, взятому относительно точки O1 пересечения оси с этойплоскостью.
Второе определение фактически дает метод вычисления момента силы относи-
тельнооси. Такжеможно отметить, что момент силыотносительно оси равен ну-
люесли
1.силапараллельнаоси
2.линиядействиясилыпересекаетось.
Обавариантамогутбытьсоединеныводин: силаиосьлежатводнойплоско-
сти.
Теорема Вариньона о моменте равнодействующей справедлива и для моментов относительно любой оси. Теоремой особенно удобно пользоваться для нахождения моментов силы относительно координатных осей, разлагая силу насоставляющие, параллельныеосямилиихпересекающие.
•Теорема о параллельном переносе силы.
Теорема о параллельном переносе силы: силу, приложенную к абсолютно твердому телу, можно, не изменяя оказываемого ею действия, переносить из данной точки в любую другую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, куда сила переносится.
Доказательство
•Теорема о приведении системы сил к заданному центру.
Пусть на твердое тело действует произвольная система сил. Выберем ка- кую-нибудь точку О за центр приведения и пользуясь доказанной ранее теоремой о параллельном переносе перенесем в выбранный центр все силы присоединяя при этом в соответствующие пары (см. рис.).
9
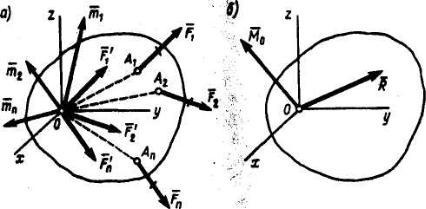
По выполнении данной процедуры получим сходящуюся систему сил и некоторый набор пар сил, определяемый моментами этих пар.
Сходящиеся силы, приложенные в точке О, заменяются одной силой R,
приложенной в точке О. При этом
R = ∑Fk k
Чтобы сложить все полученные пары, надо сложить векторы моментов этих пар. В результате система пар заменится одной парой, момент которой МО равен
MO = ∑mO (Fk ) k
Как известно, величина R, равная геометрической сумме всех сил, называется главным вектором системы сил; величина МО, равная геометрической сумме моментов всех сил относительно центра О, называется главным мо-
ментом системы сил относительно этого центра.
Таким образом, мы доказали следующую теорему о приведении системы сил: любая система сил, действующих на абсолютно твердое тело, при
приведении к произвольно выбранному центру О заменяется одной силой R, равной главному вектору системы сил и приложенной в центре приведения О, и одной парой с моментом МО, равным главному моменту системы сил относительно центра О.
Заметим, что сила R не является здесь равнодействующей данной системы сил, так как заменяет систему сил не одна, а вместе с парой.
Из доказанной теоремы следует, что две системы сил, имеющие одинаковые главные векторы и главные моменты относительно одного и того оке цен-
тра, эквивалентны (условия эквивалентности систем сил).
Отметим еще, что значение R от выбора центра О, очевидно, не зависит. Значение же МО при изменении положения центра О может в общем случае изменяться вследствие изменения значений моментов отдельных сил. Поэтому всегда необходимо указывать, относительно какого центра определяется главный момент.
Рассмотрим в заключение два частных случая:
1) если для данной системы сил R=0, а МО≠0, то она приводится к одной паре сил с моментом МО. В этом случае значение МО не зависит от выбора
10