

Реферат Локационные лазерные устройства
.docБалтийский государственный технический университет «Военмех» им. Д. Ф. Устинова
Реферат
«Локационные лазерные устройства»
Выполнил:
Студент
Григорьев М.О.
Группа К481
Преподаватель:
Коротков Е.Б.
Санкт-Петербург
2011
Локационные лазерные устройства - устройства предназначенные для измерения расстояния с большой точностью и скоростью. Появление лазеров и развитие компьютерных технологий стало толчком для появления лидаров. Понятие лидар впервые появилась в работе Миддлтона и Спилхауса «Метеорологические инструменты» 1953 года.
Лидар-технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления отражения света и его рассеивания в прозрачных и полупрозрачных средах, - лазерные локаторы, используемые для зондирования толщи моря, морской и земной поверхности, атмосферы.
Лидар как прибор представляет собой, как минимум, активный дальномер оптического диапазона. Сканирующие лидары в системах машинного зрения формируют двумерную или трёхмерную картину окружающего пространства. «Атмосферные» лидары способны не только определять расстояния до непрозрачных отражающих целей, но и анализировать свойства прозрачной среды, рассеивающей свет. Разновидностью атмосферных лидаров являются доплеровские лидары, определяющие направление и скорость перемещения воздушных потоков в различных слоях атмосферы.
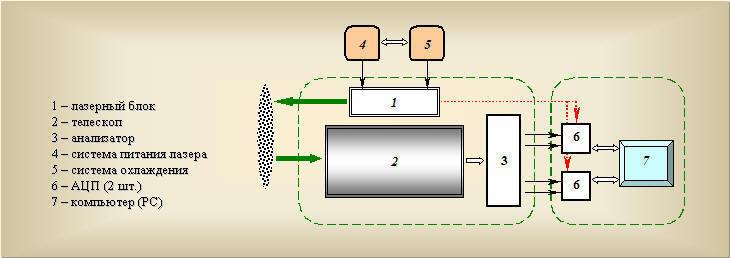
Лазерная головка генерирует короткие импульсы излучения на длинах волн 1064, 532 и 355 нм, которые коллимируются и узким лучом направляются в атмосферу.
Блоки питания и контроля обеспечивают накачку активного элемента лазера и управляют лазером.
Двухконтурный автономный блок охлаждения необходим для охлаждения активного элемента лазера. Во внутреннем контуре используется дистиллированная вода, во внешнем контуре - хладон‑12.
Излучение лазера, рассеянное аэрозолем атмосферы в обратном направлении, попадает на приемную апертуру телескопа и фокусируется на входном окне четырехканального анализатора (фотоприемного блока).
Основными элементами анализатора являются 4 фотоумножителя (ФЭУ), служащие детекторами излучения. Для питания ФЭУ используются высоковольтные источники питания, а для питания усилителей и термоэлектрических холодильников ФЭУ - низковольтные источники питания.
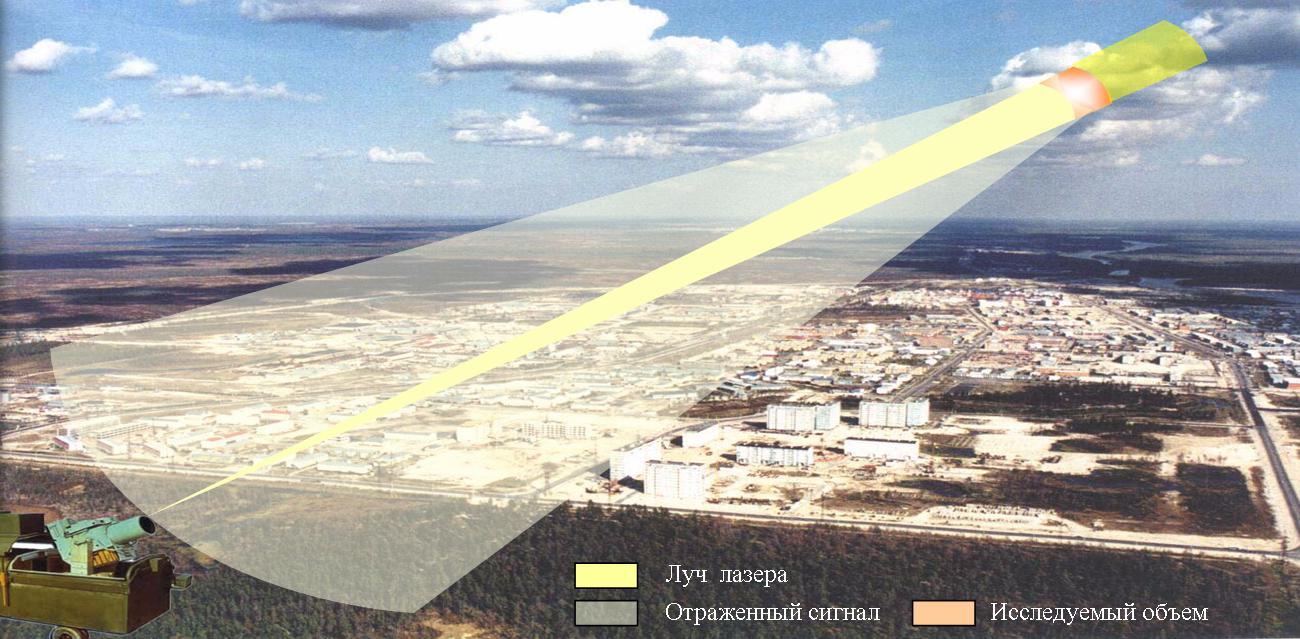
Принцип действия лидара основан на измерении интенсивности рассеяния лазерного излучения аэрозолем атмосферы. Лидар посылает в атмосферу короткий импульс света и принимает обратно сигнал обратного рассеяния.
Рассеяние света в атмосфере происходит как молекулами воздуха (Релеевское рассеяние), так и частицами аэрозоля. Таким образом, наличие аэрозоля в атмосфере увеличивает сигнал обратного рассеяния по сравнению с чистой атмосферой и концентрация аэрозоля может быть определена как функция расстояния и интенсивности сигнала на фоне чистой атмосферы.
Лазерная головка генерирует короткие импульсы излучения на длинах волн 1064, 532 и 355 нм, которые коллимируются и узким лучом направляются в атмосферу.
Блоки питания и контроля обеспечивают накачку активного элемента лазера и управляют лазером.
Двухконтурный автономный блок охлаждения необходим для охлаждения активного элемента лазера. Во внутреннем контуре используется дистиллированная вода, во внешнем контуре - хладон‑12.
Излучение лазера, рассеянное аэрозолем атмосферы в обратном направлении, попадает на приемную апертуру телескопа и фокусируется на входном окне четырехканального анализатора (фотоприемного блока).
Основными элементами анализатора являются 4 фотоумножителя (ФЭУ), служащие детекторами излучения. Для питания ФЭУ используются высоковольтные источники питания, а для питания усилителей и термоэлектрических холодильников ФЭУ - низковольтные источники питания.
Сигналы с выхода ФЭУ поступают в двухканальные аналого-цифровые преобразователи АЦП, установленные в слот компьютера. Оцифрованные с помощью АЦП выходные аналоговые сигналы ФЭУ направляются в память РС для сохранения и дальнейшей первичной и вторичной (тематической) обработки.
Для решения каждой конкретной атмосферной задачи используется конкретная схема лидара. Однако во всех случаях в лидаре непременно присутствуют три основных блока: лазерный источник излучения с передающей антенной; приемная антенна с фотодетектором; регистратор лидарных сигналов. Для многих атмосферных задач необходимо селектировать собранный приемной антенной лидарный сигнал по спектральным частотам и по поляризации. В этих случаях на выходе приемной антенны лидара устанавливают анализаторы спектра или поляризации принимаемого оптического сигнала. Следовательно, к основным блокам лидара можно отнести также анализаторы спектра или поляризации лидарного сигнала. Кроме того, регистрация таких быстропротекающих процессов, каким является лидарный сигнал, невозможна без использования быстродействующих процессоров. Как правило, для этих целей используют современные компьютеры, которые позволяют не только обрабатывать, хранить и визуализировать лидарные данные, но и контролировать параметры и управлять всеми компонентами лидара в автоматизированном режиме. Таким образом, обобщенную схему современного лидара можно представить состоящей из пяти основных блоков.
Лидар LSA-2c предназначен для оперативного дистанционного анализа характеристик атмосферного аэрозоля с помощью лазера, работающего на длинах волн 1064 и 532 нм.

|
Общие характеристики |
|
|
Схема измерения |
Дистанционная |
|
Диапазон измерений |
до 10 км |
|
Время измерения одного профиля аэрозоля |
не более 15 мин |
|
Лазерный блок |
|
|
Излучатель |
Nd:YAG лазер Ь5-2131 |
|
Рабочие длины волн |
1064, 532 нм |
|
Энергия импульса лазера на длине волны 1064 нм |
до 100 мДж |
|
Энергия импульса лазера на длине волны 532 нм |
до 50 мДж |
|
Частота повторения импульсов |
не более 20 Гц |
|
Энергия накачки |
до 25 Дж |
|
Увеличение спектроделителя 52-35-5ХА |
5X |
|
Приемный телескоп |
|
|
Приемник обратно рассеянной радиации |
телескоп типа Квази-Кассегрена |
|
Диаметр главного зеркала телескопа |
260 мм |
|
Фокусное расстояние |
1050 мм |
|
Диапазон сканирования по углу места |
от -10° до +90° от горизонтали |
|
Диапазон сканирования по азимуту |
от -180°до +180° |
|
Фотоприемный блок (анализатор) |
|
|
Число приемных каналов |
2 (1064 и 532 нм) |
|
Фотоприемники |
|
|
канал 1064 нм: |
лавинный фотодиод с квантовой эффективностью фотокатода 40% |
|
канал 532 нм |
фотоумножитель (ФЭУ-100) с квантовой эффективностью фотокатода 10% |
|
Полуширина пропускания интерфильтра на длине волны 1064 нм (на уровне 0,5) |
3 нм |
|
Полуширина пропускания интерфильтра на длине волны 532 нм (на уровне 0,5) |
2 нм |
|
Система регистрации и обработки сигналов |
|
|
Режим обработки сигналов |
аналоговый |
|
Разрядность АЦП |
12 бит |
|
Частота стробирования (выборки) |
30 МГц |
|
Спектральное разрешение |
5 м |
|
Число измеряемых точек |
2048 |
|
Приемо-передающая система (телескоп направлен горизонтально) |
960x630x1160 мм |
|
Стойка с системами питания и охлаждения |
530x530x660 мм |
|
Общая масса ЛИДАРА |
не более 180кг |
|
Условия эксплуатации |
|
|
температура воздуха |
(288-303) К (+15 ...+30)°С |
|
относительная влажность воздуха при температуре25°С и ниже |
(40 - 80)% |
|
атмосферное давление |
84-104 кПа (630-780 мм рт. ст.) |
|
Питание |
|
|
Максимальная электрическая мощность, потребляемая прибором |
не более 0,75 кВт |
В современном мире существуют мобильные лидарные системы, которые устанавливаются на автомобильные и авиационные платформы, такие системы широко востребованы военными, метеорологическими и многими другими службами. Также недавно был создан лидар позволяющий получить трехмерное изображение.
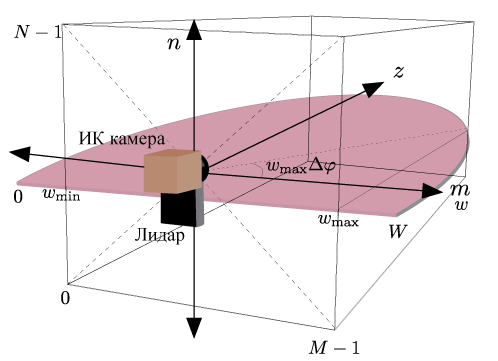
Такой лидар проходил испытание на проекте «Умный автомобиль», данная система позволяет распознавать пешеходов и внезапные препятствия на дороге. В ходе испытаний система работала без нареканий и сбоев, и позволяла получать ниже приведенную картинку окружающего.
