4. Уравнение движения манипулятора. Прямая задача динамики
Для реализации
заданного движения
 звена манипулятора, силовой привод
звена манипулятора, силовой привод сочленения должен развить момент
сочленения должен развить момент ,
который вычисляется по следующему
выражению:
,
который вычисляется по следующему
выражению:


или в матричном виде

где  вектор (размерностью
вектор (размерностью )
обобщенных сил, создаваемых силовыми
приводами в сочленениях манипулятора.
)
обобщенных сил, создаваемых силовыми
приводами в сочленениях манипулятора.
 вектор (размерностью
вектор (размерностью
 )
присоединенных переменных манипулятора
)
присоединенных переменных манипулятора
 вектор (размерностью
вектор (размерностью
 )
обобщенных скоростей
)
обобщенных скоростей
 вектор (размерностью
вектор (размерностью
 )
обобщенных ускорений
)
обобщенных ускорений
 симметричная
матрица размерностью
симметричная
матрица размерностью
 ,
элементы которой даются выражением
,
элементы которой даются выражением

 –вектор
(размерностью
–вектор
(размерностью )
кориолисовых и центробежных сил.
)
кориолисовых и центробежных сил.



 вектор (размерностью
вектор (размерностью
 )
гравитационных сил.
)
гравитационных сил.


 число присоединенных
переменных;
число присоединенных
переменных;
 матрица инерции
j-го
звена
матрица инерции
j-го
звена
|½*(-Jxxj+Jyyj+Jzzj) Jxyj Jxzj mj*xj |
| Jxyj ½*(Jxxj-Jyyj+Jzzj) Jyzj mj*xj |
Jj=| Jxzj Jyzj ½*(Jxxj+Jyyj-Jzzj) mj*xj | (7)
| mj*xj mj*yj mj*zj mj |
Jxxj, Jyyj, Jzzj, Jxyj, Jxzj, Jyzj – компоненты матрицы инерции j j-го звена в системе координат, связанной с этим звеном:
| Jxxj -Jxyj -Jyzj |
j= | -Jxyj Jyyj -Jyzj | (8)
| -Jxzj -Jyzj Jzzj |
j = cj + cj, (9)
где cj – тензор инерции j-го звена в системе координат, связанной со звеном и перенесенной в центр масс звена:
| Jxxсj -Jxyсj -Jyzсj |
сj = | -Jxyсj Jyyсj -Jyzсj | (9)
| -Jxzсj -Jyzсj Jzzсj |
| 2 2 |
| yсj + zcj -xсj*ycj -xcj*zсj |
| 2 2 |
cj = mj * | -xcj*yсj xcj + zcj -yсj*zcj | (10)
| 2 2 |
| -xcj*zсj -ycj*zсj xcj + ycj |
Uikm – величина характеризующая взаимодействие сочленений; определяется следующим образом
| A[0,j-1]*Qj*A[j-1,k-1]*Qk*A[k-1,i], если i k j;
Uikm = { A[0,k-1]*Qk*A[k-1,j-1]*Qj*A[j-1,i], если i j k; (11)
| 0, если i <j или j<k.
Вектор g в выражении 11.6 описывает гравитационное ускорение в базовой системе координат:
g = (gx,gy,gz,0) (12)
j _
rj – радиус-вектор центра масс j-го звена в системе координат j-го звена:
j _ T
rj = (xcj,ycj,zcj,1 ) (13)
Согласно (3.2-26)[1], уравнение движения манипулятора можно представить в виде

где
 – вектор обобщенных сил,
– вектор обобщенных сил,
 – вектор обобщенных координат
манипулятора,
– вектор обобщенных координат
манипулятора, вектор обобщенных скоростей,
вектор обобщенных скоростей, – вектор обобщенных ускорений.
– вектор обобщенных ускорений.
Элементы квадратной
симметрической матрицы
 найдем по формуле (3.2-31)[1]
найдем по формуле (3.2-31)[1]
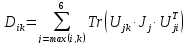
где матрица
 ,
согласно (3.2-11)[1] характеризует изменение
положения точки -го звена относительно
базовой системы координат, обусловленное
изменением координаты
,
согласно (3.2-11)[1] характеризует изменение
положения точки -го звена относительно
базовой системы координат, обусловленное
изменением координаты ;
; – матрица инерции
– матрица инерции -го
звена.
-го
звена.
Вектор кориолисовых
и центробежных сил
 найдем по формулам (3.2-32)-(3.2-33)[1]
найдем по формулам (3.2-32)-(3.2-33)[1]


Вектор
гравитационных сил
 найдем по формуле (3.2-34)[1]
найдем по формуле (3.2-34)[1]

В которой
 – координаты центра масс -го звена в
– координаты центра масс -го звена в -й
системе координат.
-й
системе координат.
В среде Matlab составим программу (приложение 1) и вычислим обобщенные силы, возникающие в сочленениях при реализации траектории.

Рисунок 2.Обобщенная сила в 1-м сочленении.

Рисунок 3. Обобщенная сила во 2-м сочленении.
В
качестве примера решения прямой задачи
динамики зададим свободное движение
манипулятора, т.е. в уравнении движения
положим вектор
 ,
и найдем зависимости обобщенных координат
от времени. Для этого опишем уравнение
движения в форме Коши, и проведем
интегрирование методом Рунге-Кутты.
,
и найдем зависимости обобщенных координат
от времени. Для этого опишем уравнение
движения в форме Коши, и проведем
интегрирование методом Рунге-Кутты.
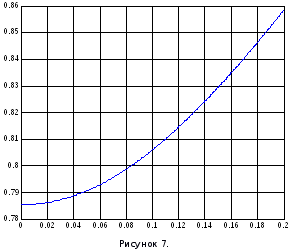
 Ниже
приведены результаты решения.
Ниже
приведены результаты решения.