

1-kinematika
.pdfТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Теоретическая механика – наука об общих законах движения и равновесия материальных тел и о возникающих при этом механических взаимодействиях между телами
Движение (механическое движение) – это изменение с течением времени положения данного тела в пространстве по отношению к другим телам Равновесие – это состояние покоя тела по отношению к другим материальным телам
Механическое взаимодействие между телами – это вид взаимодействия, при котором происходит изменение движения этих тел или изменение их формы (деформация) Мера механического взаимодействия между телами в механике называется силой
МАТЕРИАЛЬНЫЕ ОБЪЕКТЫ
1.Материальная точка (МТ, в дальнейшем иногда слово «материальная» будем опускать) – это тело, имеющее массу, размерами которого при изучении его движения можно пренебречь
2.Абсолютно твердое тело (АТТ, в дальнейшем – «твердое тело») – тело, расстояние между любыми двумя точками которого всегда остается постоянным
3.Механической системой (МС) материальных точек или твердых тел называется такая их совокупность, в которой положение или движение каждой точки (или тела) зависит от положения и движения всех остальных
Основная задача теоретической механики: изучение общих законов движения и равновесия материальных тел под действием приложенных к ним сил
Основные разделы теоретической механики:
1.Кинематика (изучает движение материальных объектов без учета масс и сил)
2.Статика (изучает условия равновесия материальных объектов под действием сил)
3.Динамика (изучает законы движения материальных объектов под действием сил)
[Разработчик Щербакова А.О.] |
Страница 1 |

ТЕОРЕТИЧЕСКАЯ МЕХАНИКА. КИНЕМАТИКА
Кинематика – это раздел теоретической механики, изучающий движение материальных объектов без учета масс и сил
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Система отсчета – это система координат, жестко связанных с телом отсчета, снабженная часами (для простоты ограничимся использованием декартовых координат: x , y , z ; пространство – трехмерное евклидово пространство; время t – скалярная непрерывно изменяющаяся величина)
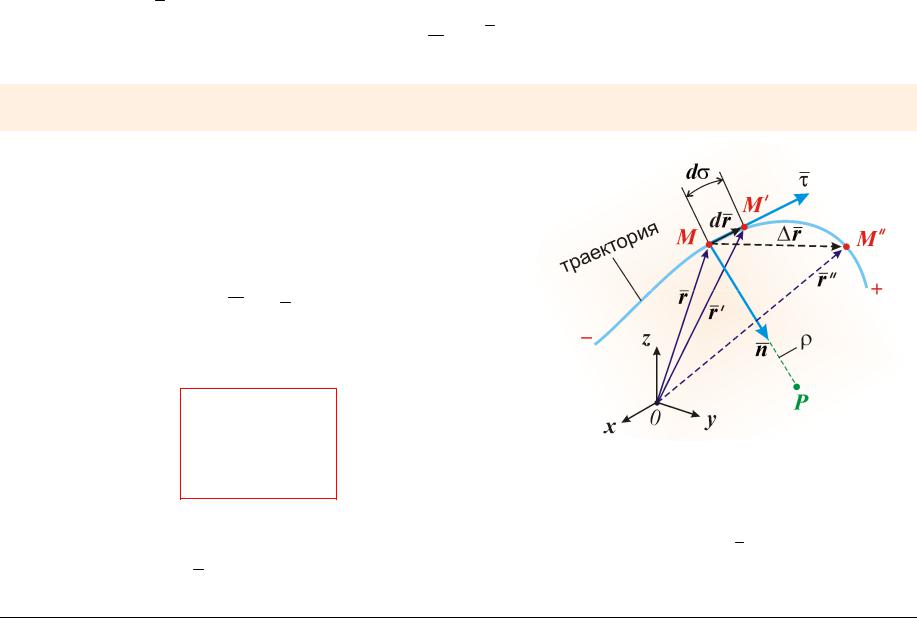
Траектория материальной точки – это непрерыв-
ная линия, которую описывает точка M в заданной системе отсчета, двигаясь из начального положения M0 (начало отсчета, при этом t=0)
Дуговая координата σ(t ) – это отсчитанное по введенному правилу знаков расстояние по дуге траектории от начального положения точки (начало отсчета) до положения точки во время t (отметим, что дуговая координата определяет положение точки относительно начала отсчета)
Задать движение (задать закон движения) точки (тела) означает задать положение этой точки (тела) в пространстве в заданной системе отсчета в любой момент времени
Основная задача кинематики – зная закон движения заданного тела (точки), определить все кинематические величины, характеризующие как движение этого тела в целом, так и движение каждой из его точек в отдельности (траектории, скорости, ускорения)
[Разработчик Щербакова А.О.] |
Страница 2 |

ТРИ СПОСОБА ЗАДАНИЯ ЗАКОНА ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
1) При векторном способе закон движения задают как функцию радиус-вектора r точки от времени:
r = r (t )
Радиус-вектор – это вектор, проведенный из начала координат в заданную точку
2) Согласно координатному способу, закон дви-
жения задают как зависимость всех координат точки от времени:
x = x(t )
=
y y(t )
z = z t
( )
Отметим, что координаты ( x , y , z ) заданной точки совпадают с координатами ее радиус-вектора r
3) При естественном способе закон движения точки задают в виде зависимости ее дуговой координаты от времени:
σ = σ(t )
Естественные оси – это оси, жестко связанные с данной материальной точкой, которые задают с помощью ортов естественного трехгранника: n , ф и b , при этом
орт n направлен из данной точки к центру кривизны траектории;
орт ф направлен по касательной к траектории по направлению движения; орт b ортогонален плоскости, образованной векторами n и ф
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ф |
|
|
|
|
|
|
n |
|
= |
|
ф |
= |
b |
= 1, |
n |
b |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[Разработчик Щербакова А.О.] |
|
|
|
|
|
Страница 3 |
|||||||||||||

ТРАЕКТОРИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
Закон движения, записанный в координатной форме, представляет собой одновременно уравнения траектории точки в параметрической форме
Уравнение траектории в обычной форме можно найти, исключив из уравнений движения время t Пример 1. Пусть движение точки в плоскости {xy} задано уравнениями:
x = 2t + 4
= −
y 5t
Выразив параметр t из второго уравнения, и, подставив в первое, получим уравнение траектории:
y= 10 − 2.5 x
Вначальный момент времени t = 0 , x = 4 , y = 0 . При увеличении t координата x возрастает, а y убывает.
Пример 2. Пусть движение точки в плоскости {xy} задано уравнениями:
x = 3 sin(πt )
y = 4 cos(πt )
Разделим первое уравнение на 3, второе на 4, затем возведем оба уравнения в квадрат и сложим. В результате получим уравнение траектории:
x |
2 |
|
|
y |
2 |
|||
|
|
|
+ |
|
|
|
|
= 1 |
|
|
|||||||
|
3 |
|
|
|
4 |
|
||
В начальный момент времени t = 0 , |
|
x = 0 , y = 4 . При увеличении t коор- |
||||||
дината x возрастает, а y убывает.
[Разработчик Щербакова А.О.] |
Страница 4 |
СКОРОСТЬ МАТЕРИАЛЬНОЙ ТОЧКИ
Средняя скорость материальной точки за промежуток времени t равна отношению вектора перемещения r точки к соответствующему промежутку времени
V = r t
Скорость (мгновенная скорость) материальной точки в данный момент времени равна пер-
вой производной от радиус-вектора точки по времени
1. Векторный способ записи:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
dr |
& |
|
|||||||
|
|
|
|
|
|
|||||||||||
|
|
V = lim |
= |
|
|
|
≡ r |
|
||||||||
|
|
|
|
|
|
|
t →0 t |
|
dt |
|
|
|||||
|
|
|
= |
|
' − |
|
≈ dσ |
|
|
отсюда следует, что |
||||||
Отметим, что dr |
|
r |
r |
ф, |
||||||||||||
вектор скорости направлен по касательной к траектории в сторону движения точки
V ↑↑ ф
2. Координатный способ записи:
Vx = dx / dt ≡ x&V y = dy / dt ≡ y&Vz = dz / dt ≡ z&
3. Естественный способ записи:
|
|
= |
dσ |
|
ф≡ σ& |
|
|
|
V = |
dσ |
≡ σ& |
|
V |
||||||||||||
|
ф |
, |
||||||||||
|
|
|||||||||||
|
|
|
dt |
|
|
dt |
||||||
НЕ ПУТАТЬ центр кривизны траектории (точка P) и начало координат (точка 0), а также радиус-вектор r и радиус кривизны траектории ρ
[Разработчик Щербакова А.О.] |
Страница 5 |

УСКОРЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
Ускорение (мгновенное ускорение) материальной точки в данный момент времени равно первой производной от скорости или второй производной от радиус-вектора точки по времени
1. Векторный способ записи: 2. Координатный способ:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
& |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
= V |
x |
|
= x&& |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
dV |
|
|
d |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
a = |
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
≡ V |
= r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
= V |
y |
|
= &y& |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
dt |
|
|
dt 2 |
|
|
|
|
|
|
|
&& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
3. Естественный способ: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a z |
= Vz |
= &z& |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
d (V τ) |
= |
dV |
τ + |
dτ |
V = |
|
τ + |
|
|
|
n |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
dV |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
a |
a |
a |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
dt |
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
{ { |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
τ |
|
|
|
a |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
dτ ≈ |
|
τ |
|
dϕ |
|
= 1 |
dσ |
|
|
= |
dσ |
|
|
|
|
|
= |
dσ |
|
V |
|
|
= |
V 2 |
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
n |
n |
n |
a |
n |
n |
n |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρ |
|
|
|
|
|
|
|
|
ρ |
|
|
|
|
|
|
|
|
|
|
dt с |
|
|
|
|
|
|
с |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Таким образом, ускорение раскладывают по естественным осям на две составляющие: an и aτ
an — нормальное (центростремительное) ускорение aτ — касательное (тангенциальное) ускорение
|
|
|
|
|
|
|
|
|
|
|
V 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ = |
dV |
|
|
|
|
|
|
= |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
τ + |
|
n |
a = an2 + aτ2 |
|||||
|
a |
|
ф |
|
an |
n |
a |
a |
a |
||||||||||||||||
|
|
|
|||||||||||||||||||||||
|
|
|
dt |
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[Разработчик Щербакова А.О.] |
Страница 6 |

НЕКОТОРЫЕ ЧАСТНЫЕ СЛУЧАИ ДВИЖЕНИЯ ТОЧКИ
Ускоренное движение: |
Замедленное движение: |
Равномерное криволинейное |
||||||||
|
|
|
|
|
|
|
|
|
|
движение: aτ = 0 |
|
|
τ ↑↑ V |
|
|
|
τ ↑↓ V |
||||
a |
a |
|||||||||
Прямолинейное движение: an = 0 |
Равнопеременное движение: aτ = Const |
|
|
||||||||||||||
|
а) равноускоренное |
|
|
|
|
|
|
|
|
|
|
||||||
|
V |
|
↑↑ |
|
|
τ |
|
|
|||||||||
|
a |
|
|
||||||||||||||
|
|
|
|
|
↑↓ |
|
τ |
|
|
||||||||
|
б) равнозамедленное V |
|
|
||||||||||||||
|
a |
|
|
||||||||||||||
|
Зависимость скорости точки от времени при |
||||||||||||||||
|
равнопеременном движении: |
|
|
||||||||||||||
|
a |
|
= |
dV |
∫ dV = ∫ a |
dt |
|
V −V = a |
t |
||||||||
|
τ |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
τ |
|
0 |
τ |
|
||||
dt
V (t ) = V0 + aτ t
Здесь V0 – начальная скорость точки
[Разработчик Щербакова А.О.] |
Страница 7 |

Зависимость ускорения точки от времени при равнопеременном движении:
V = |
dσ |
∫ dσ = ∫V dt ∫ dσ = ∫ (V + a |
t )dt σ − σ |
|
= V t + |
1 |
a |
t 2 |
|||||||
|
0 |
|
|||||||||||||
|
dt |
|
|
|
0 |
τ |
|
|
|
0 |
2 |
τ |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
σ(t ) = σ |
|
+ V t + |
1 |
a |
t 2 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|||||||
|
|
|
|
0 |
2 |
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Здесь σ0 – начальная координата точки |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Пример 3 (координатный способ задания движения). При заданном законе движения точки
x = V0 t |
|
||
|
|
|
|
|
1 |
|
2 |
y = |
|
gt |
|
|
|
||
|
2 |
|
|
определить ее траекторию, скорость и ускорение ( g и V0 – константы).
Исключив из заданных уравнений параметр T, получим уравнение траектории:
y =
Зависимость скорости от времени:
Ускорение:
g |
|
x 2 |
|
|
|
|
|
|
|
|
|
|
|
2V 2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
x |
= x& |
= V |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||||
|
|
|
0 , |
V = Vx2 + V y2 = V02 + ( gt ) 2 |
|||||||||
V y = y& = gt |
|
|
|
|
|
|
|
|
|||||
a |
|
|
= V |
|
= 0 |
|
|
|
|
|
|
|
|
|
x |
& |
x |
|
|
|
|
|
|
= a y = g |
|||
|
|
|
2 |
2 |
|||||||||
|
|
|
& |
|
= g |
, |
a = |
a x |
+ a y |
||||
a |
y |
= V |
y |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
[Разработчик Щербакова А.О.] |
Страница 8 |

Пример 4 (естественный способ задания движения). Точка начинает двигаться из состояния покоя равноускоренно по окружности радиуса r и, пройдя путь σ1 , приобретает скорость V1 . Найти скорость V2 и ускорение a2 точки в момент, когда пройденный путь равен σ2 .
Так как точка начинает двигаться из состояния покоя, то
σ = σ0 |
+V0 t + |
aτ t 2 |
= |
aτ t 2 |
, |
V = V0 |
+ aτ t = aτ t |
2 |
|
||||||
{ { |
2 |
|
{ |
||||
=0 |
=0 |
|
|
|
|
=0 |
|
V 2
Исключив из этих выражений из T, получим, что aτ = 2σ .
Равноускоренное движение означает постоянство aτ на всем пути, то есть:
|
|
|
|
a |
|
= |
V12 |
= |
V22 |
V |
|
= V |
|
σ2 |
|
|
|
|
|
|||||||||||||
|
|
|
|
τ |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
2σ1 |
|
2σ2 |
|
|
|
|
|
1 |
|
|
|
σ1 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Нормальное ускорение при σ = σ2 : |
an2 |
= |
V22 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
r |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
Полное ускорение при σ = σ2 : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= V 2 |
σ2 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
1 |
|
1 |
|||||||||||||
a |
|
= a 2 |
|
+ a 2 |
|
= V 2 |
+ |
|
|
+ |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
2 |
|
n |
2 |
|
|
τ |
|
|
2 |
|
|
r 2 |
|
4σ22 |
|
|
|
1 σ1 |
|
|
r 2 |
|
4σ22 |
||||||||
Заметим, что центростремительные ускорения an1 и an2 отличаются друг от друга, что обусловлено различием соответствующих скоростей V1 и V2 . Отсюда следует, что также различны полные ускорения a1 и a2 .
[Разработчик Щербакова А.О.] Страница 9

ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Поступательным называется движение твердого тела, при котором любая прямая, проведенная через две его точки, передвигается параллельно самой себе
rD = rC + C D
Вектор C D с течением времени не меняется по величине (по определению твердого тела) и направлению (остается параллельным самому себе)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dr |
D |
= |
drC |
+ |
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
C |
|
D |
V |
|
|
= V |
|
|
|
= |
|
|
||||||||||||
|
|
D |
a |
D |
a |
C |
|||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||
dt dt dt |
|
C |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
123 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Скорости (а также ускорения и траектории) всех точек твердого тела, движущегося поступательно, равны друг другу
ЗАКОН ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ определяется законом движения любой его точки:
rC = rC (t ) (или rD = rD (t ) )
Пример поступательного движения
Звено AB движется поступательно, так как во время
движения звено AB постоянно остается параллельным самому себе (а также // OO1 ), следовательно,
V A = VB = VC ≡ V ;
a A = a B = aC ≡ a .
Траектории точек звена AB представляют собой окружности, радиусы которых равны длинам отрезков OA и O1 B
[Разработчик Щербакова А.О.] |
Страница 10 |