

Пример решения задачи.
Задание. Торпеда, снабженная разгонным двигателем, нацеливается с лежащей на дне подводной лодки на поражение движущегося надводного корабля. Пуск торпеды производится в момент прохождения корабля над лодкой. Исследовать связь между глубиной залегания лодки, временем поражения цели, условиями поражения (энерговооруженностью двигателя и параметрами старта).
С хема
задачи приведена на рисунке. Принимается,
что торпеда запускается в момент
прохождения над ней корабля. Запуск
производится с начальной скоростью
хема
задачи приведена на рисунке. Принимается,
что торпеда запускается в момент
прохождения над ней корабля. Запуск
производится с начальной скоростью![]() под
угломн
к горизонтальной оси. Глубина залегания
ракеты составляет L,
скорость движения корабля равна
под
угломн
к горизонтальной оси. Глубина залегания
ракеты составляет L,
скорость движения корабля равна
![]() .
Принимается, что тяга двигателя постоянна,
равна
.
Принимается, что тяга двигателя постоянна,
равна![]() и направлена по касательной к траектории
движения торпеды по ходу движения. На
торпеду действует сила сопротивления
среды, равная по модулю
и направлена по касательной к траектории
движения торпеды по ходу движения. На
торпеду действует сила сопротивления
среды, равная по модулю![]() ,
где
- модуль
текущей скорости торпеды, которая
направлена по касательной к траектории
движения торпеды против хода ее движения.
Коэффициенты сопротивления линейного
и квадратного слагаемых будем вычислять
по формулам:
,
где
- модуль
текущей скорости торпеды, которая
направлена по касательной к траектории
движения торпеды против хода ее движения.
Коэффициенты сопротивления линейного
и квадратного слагаемых будем вычислять
по формулам:
![]() ,
,
где - динамическая вязкость среды, - плотность среды, S – площадь поперечного сечения торпеды, r – ее радиус поперечного сечения, с – коэффициент лобового сопротивления. Если поперечное сечение имеет некруглую форму, то в качестве его радиуса берется приведенная величина:
![]() .
.
На торпеду при движении действует сила тяжести с ускорением свободного падения g, направленная вертикально вниз. Угол наклона касательной к траектории движения связан с компонентами вектора скорости х и у следующими соотношениями:
![]() ,
,
которые используются для проектирования исходных уравнений движения:
на координатные
оси. Здесь
![]() - вектор перемещения торпеды.
- вектор перемещения торпеды.
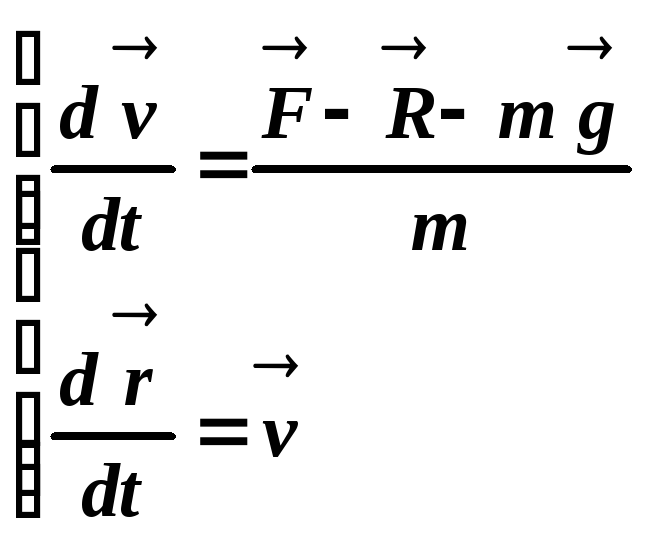
Тогда с учетом сделанных предположений система уравнений принимает вид:
 (П1)
(П1)
Для отладки программы принимаются следующие значения исходных данных: плотность воды = 1000 кг/м3, динамическая вязкость среды = 1,002 Нс/м2, коэффициент лобового (аэродинамического) сопротивления с = 0,1, ускорение свободного падения g = 9,81 м/с2. Принимаются следующие параметры торпеды и параметров старта: начальная скорость торпеды vн = 1 м/с, угол старта = 80, радиус поперечного сечения торпеды r = 0,3 м, масса торпеды m = 250 кг, сила тяги двигателя F = 30000 Н, глубина залегания торпеды L = 200 м, скорость движения корабля vк = 10 м/с. Площадь поперечного сечения, представляющего собой круг, вычисляется по формуле S = r2 . Расстояние смещения корабля после старта торпеды вычисляется по формуле Lк = vк t. Для полного определения задачи Коши задаем начальные условия следующим образом:
vx (0) = vн cos н , vy (0) = vн sin н , x(0) = 0, y(0) = 0. (П2)
Вычисления прекращаются, когда координата y достигнет величины глубина залегания торпеды L.
Для численного интегрирования системы обыкновенных дифференциальных уравнений будем использовать классический метод Рунге-Кутта 4-го порядка. Постановка задачи Коши для системы n дифференциальных уравнений первого порядка имеет вид - требуется найти решение системы:
 (П3)
(П3)
при начальных условиях
y1 (x0 ) = y10 , y2 (x0 ) = y20 , … , yn (x0 ) = yn0 .
Если правые части дифференциальных уравнений системы – непрерывны вместе со своими частными производными по переменным yi в некоторой области D (n+1)-мерного пространства, то для любой точки (x0 , y01 , …, yn ) D система имеет единственное решение, удовлетворяющее начальным условиям
y1 (x0 ) = y10 , y2 (x0 ) = y20 , … , yn (x0 ) = yn0 . (П4)
Введем векторные обозначения:

Тогда задача Коши в векторной форме имеет вид:
![]() .
(П5)
.
(П5)
Численное решение
задачи Коши состоит в том, что на отрезке
[a,
b]
требуется получить приближенные значения
координат вектора
![]() в узлах сеткиxi
, i
= 1, 2, … , m.
Обозначим вектор, аппроксимирующий
решение, через
в узлах сеткиxi
, i
= 1, 2, … , m.
Обозначим вектор, аппроксимирующий
решение, через
![]() ,
а его координаты – черезyki
, k
= 1, 2, … , n,
, i
= 1, 2, … , m
так, что yki
=
yk
(xi
)
или
,
а его координаты – черезyki
, k
= 1, 2, … , n,
, i
= 1, 2, … , m
так, что yki
=
yk
(xi
)
или
![]() .
(П6)
.
(П6)
Будем искать решение на равномерной сетке с шагом h = (b – a) /m.
Погрешность
численного метода оценивается величиной
![]() ,
гдеdi
– погрешность решения на сетке с шагом
h
в точке xi
:
,
гдеdi
– погрешность решения на сетке с шагом
h
в точке xi
:
![]() .
(П7)
.
(П7)
Практически
погрешность в точке xi
оценивают
по формуле Рунге. Пусть:
 .
– значения численного решения в точкеxi
,
полученные для шагов h
и h/2
соответственно. тогда погрешность di
в точке xi
для
вычислений с шагом h/2
выражается приближенным равенством:
.
– значения численного решения в точкеxi
,
полученные для шагов h
и h/2
соответственно. тогда погрешность di
в точке xi
для
вычислений с шагом h/2
выражается приближенным равенством:
 (П8)
(П8)
где р – порядок точности численного метода. Для метода Рунге-Кутта 4-го порядка р = 4.
Векторная форма алгоритма метода Рунге-Кутта для задачи задачи Коши имеет вид:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
(П9)
,
(П9)
![]() ,
,
![]() ,
,
где
Для данной задачи введенные обозначения конкретизируются следующим образом:
 ,
(П10)
,
(П10)
 .
(П11)
.
(П11)
Аргумент задачи – время t. Примем в качестве шага по времени величину h = 0,1.
Будем решать задачу в табличном процессоре MS Excel. Оформим рабочий лист Расчет для ввода исходных данных и оформим строку заголовков для таблицы результатов, как показано на рис. 1. Вычисления организуем в макросе Visual Basic for Applications (VBA), текст которого с комментариями приведен ниже.
' Инструкция об обязательном объявлении переменных
Option Explicit
' Объявление именованной константы
Const pi = 3.1415926
' Объявление объектовых переменных
' ID – массив исходных данных
' Rez – массив результатов
Dim ID As Object
Dim Rez As Object
' Объявление переменных
' Vx, Vy, x, y – проекции скорости, траекторные координаты
' Vn, alfa, r, Ro – начальная скорость и угол старта, радиус торпеды, плотность воды
' mu, c – динамическая вязкость, коэффициент лобового сопротивления
' m, F – масса торпеды, тяга двигателя
' g, L – ускорение свободного падения, глубина залегания торпеды
' Vk, h – скорость корабля, шаг интегрирования
' k1, k2 – линейный и квадратный коэффициент сопротивления
' t, Lk – время, расстояние смещения корабля
Dim Vx As Double, Vy As Double, x As Double, y As Double
Dim Vn As Double, alfa As Double, r As Double, Ro As Double
Dim mu As Double, c As Double, m As Double, F As Double
Dim g As Double, L As Double, Vk As Double, h As Double
Dim k1 As Double, k2 As Double, t As Double
Dim Lk As Double
' Функции для вычисления компонент вектора правых частей (П11)
Function Vxp(Vx As Double, Vy As Double) As Double
Vxp = (F / Sqr(Vx ^ 2 + Vy ^ 2) - k1 - k2 * _
Sqr(Vx ^ 2 + Vy ^ 2)) * Vx / m
End Function
Function Vyp(Vx As Double, Vy As Double) As Double
Vyp = (F / Sqr(Vx ^ 2 + Vy ^ 2) - k1 - _
k2 * Sqr(Vx ^ 2 + Vy ^ 2)) * Vy / m - g
End Function
Function xp(Vx As Double) As Double
xp = Vx
End Function
Function yp(Vy As Double) As Double
yp = Vy
End Function
' Процедура для реализации метода Рунге-Кутта
Sub Расчет()
' Объявление переменных
' i – счетчик шагов цикла
' kvx1, kvy1, kx1, ky1 – компоненты вектора k1 в (П9)
' kvx2, kvy2, kx2, ky2 – компоненты вектора k2 в (П9)
' kvx3, kvy3, kx3, ky3 – компоненты вектора k3 в (П9)
' kvx4, kvy4, kx4, ky4 – компоненты вектора k4 в (П9)
Dim i As Integer
Dim kvx1 As Double, kvx2 As Double, kvx3 As Double
Dim kvx4 As Double, kvy1 As Double, kvy2 As Double
Dim kvy3 As Double, kvy4 As Double, kx1 As Double
Dim kx2 As Double, kx3 As Double, kx4 As Double
Dim ky1 As Double, ky2 As Double, ky3 As Double
Dim ky4 As Double
' Связывание объектовой переменной ID с диапазоном исходных данных
' листа Расчет
Set ID = Worksheets("Расчет ").Range("A2:A13")
' Связывание объектовой переменной Rez с диапазоном результатов расчета
' листа Расчет
Set Rez = Worksheets("Расчет").Range("A17:F10000")
' Обнуление содержания объектовой переменной Rez
Rez.ClearContents
' Присвоение значений исходным данным из объектовой переменной ID
Vn = ID(1)
alfa = ID(2)
alfa = alfa * pi / 180
r = ID(3)
Ro = ID(4)
mu = ID(5)
c = ID(6)
m = ID(7)
F = ID(8)
g = ID(9)
L = ID(10)
Vk = ID(11)
h = ID(12)
' Вычисление линейного и квадратного коэффициентов сопротивления (П1)
k1 = 6 * pi * mu * r
k2 = c * pi * r ^ 2 * Ro / 2
' Вычисление начальных условий (П2)
Vx = Vn * Cos(alfa)
Vy = Vn * Sin(alfa)
x = 0
y = 0
t = 0
Lk = 0
' Вывод результатов в начальный момент времени
i = 1
Rez(1, 1) = t
Rez(1, 2) = x
Rez(1, 3) = y
Rez(1, 4) = Vx
Rez(1, 5) = Vy
Rez(1, 6) = Lk
' Начало цикло вычислений, который заканчивается, когда координата y превысит
' глубину залегания
Do Until y > L
' Вычисление компонент векторов k1 – k4 по (П9) и (П11)
kvx1 = Vxp(Vx, Vy)
kvy1 = Vyp(Vx, Vy)
kx1 = xp(Vx)
ky1 = yp(Vy)
kvx2 = Vxp(Vx + kvx1 * h / 2, Vy + kvy1 * h / 2)
kvy2 = Vyp(Vx + kvx1 * h / 2, Vy + kvy1 * h / 2)
kx2 = xp(Vx + kvx1 * h / 2)
ky2 = yp(Vy + kvy1 * h / 2)
kvx3 = Vxp(Vx + kvx2 * h / 2, Vy + kvy2 * h / 2)
kvy3 = Vyp(Vx + kvx2 * h / 2, Vy + kvy2 * h / 2)
kx3 = xp(Vx + kvx2 * h / 2)
ky3 = yp(Vy + kvy2 * h / 2)
kvx4 = Vxp(Vx + kvx3 * h, Vy + kvy3 * h)
kvy4 = Vyp(Vx + kvx3 * h, Vy + kvy3 * h)
kx4 = xp(Vx + kvx3 * h)
ky4 = yp(Vy + kvy3 * h)
' Вычисление значений переменных на новом слое по (П9)
Vx = Vx + h * (kvx1 + 2 * kvx2 + 2 * kvx3 + kvx4) / 6
Vy = Vy + h * (kvy1 + 2 * kvy2 + 2 * kvy3 + kvy4) / 6
x = x + h * (kx1 + 2 * kx2 + 2 * kx3 + kx4) / 6
y = y + h * (ky1 + 2 * ky2 + 2 * ky3 + ky4) / 6
' Вычисление новых значений времени, смещения корабля и номера строки
' вывода результатов
t = t + h
Lk = t * Vk
i = i + 1
' Вывод результатов в текущий момент времени
Rez(i, 1) = t
Rez(i, 2) = x
Rez(i, 3) = y
Rez(i, 4) = Vx
Rez(i, 5) = Vy
Rez(i, 6) = Lk
' Оператор конца цикла
Loop
End Sub
Для запуска макроса разместим на рабочем листе элемент управления Кнопка и сформируем процедуру обработки события Click следующего содержания:
Private Sub CommandButton2_Click()
Расчет
End Sub
Результаты расчета показывают, что для приведенных исходных данных время движения торпеды до поверхности воды составило t = 5,4 с, за которое корабль сместится на Lк = 54 м. При этом координата торпеды в момент выхода на поверхность составляет х = 94,691 м, то есть цель не поражена.
Используя разработанную программу, проведем серию расчетов по моделированию изучаемого процесса.
1. Построим траекторию движения торпеды для разных углах старта. Данные расчетов представлены на рис. 2. Из приведенных данных видно, что начиная с некоторого угла старта, торпеда не достигает поверхности воды.
2. Проведем серию расчетов для углов старта от 90 до 80 через 1 и трех значений тяги двигателя F = ( 30 кН, 50 кН, 100 кН ) для глубины залегания L = 500 м. В расчетах определялись смещение xвых торпеды по оси Х на момент выхода на поверхность воды и время движения tвых до поверхности. Результаты расчетов приведены в таблице.
|
, |
F = 30 кН |
F = 50 кН |
F = 100 кН | |||
|
xвых |
tвых |
xвых |
tвых |
xвых |
tвых | |
|
90 |
0 |
11,7 |
0 |
8,9 |
0 |
6,2 |
|
89 |
57,6 |
11,8 |
24,4 |
8,9 |
14,0 |
6,2 |
|
88 |
123,1 |
12,2 |
49,3 |
9,0 |
27,9 |
6,2 |
|
87 |
219,8 |
13,3 |
73,6 |
9,0 |
42,8 |
6,3 |
|
86 |
- |
- |
99,7 |
9,1 |
56,9 |
6,3 |
|
85 |
- |
- |
126,3 |
9,2 |
71,1 |
6,3 |
|
84 |
- |
- |
156,3 |
9,4 |
85,1 |
6,3 |
|
83 |
- |
- |
187,7 |
9,6 |
101,3 |
6,4 |
|
82 |
- |
- |
224,1 |
9,9 |
115,4 |
6,4 |
|
81 |
- |
- |
262,0 |
10,2 |
129,4 |
6,4 |
|
80 |
- |
- |
316,5 |
10,8 |
146,5 |
6,5 |
Из приведенной таблицы видно, что при малой энерговооруженности двигателя и малых углах старта торпеда не достигает поверхности воды. По данным проведенных расчетов построена номограмма определения угла старта торпеды при заданных тяге F двигателя при заданной глубине залегания L = 500 м для трех значений скорости корабля v = ( 5 м/с, 10 м/с, 15 м/с ). Величина определяется как абсцисса пересечения графиков функций xвых ( ) и Lк( )(рис 3). Результаты обработки номограммы приведены в таблице.
|
|
v = 5 м/с |
v = 10 м/с |
v = 15 м/с |
|
F = 30 кН |
89,1 |
88,0 |
87,2 |
|
F = 50 кН |
88,2 |
86,2 |
84,3 |
|
F = 100 кН |
87,9 |
85,8 |
83,7 |
3. Оценим точность полученных результатов используя правило Рунге. Для этого воспользуемся результатами расчетов предыдущего пункта при F = 100 кН и = 80. Рассмотрим результаты расчета параметров задачи на момент времени t = 6 c, полученные при расчете с шагом h = 0,1 с и h = 0,05 с и оценим абсолютную точность полученных результатов по формуле Рунге, учитывая 4-ый порядок точности используемого метода:
![]()
Относительную погрешность определим по формуле:
![]() .
.
Результаты расчетов представлены в таблице.
|
|
x, м |
y, м |
vx , м/с |
vy , м/с |
|
h = 0,1 |
130,725 |
466,604 |
30,685 |
77,034 |
|
h = 0,1 |
134,764 |
465,432 |
31,602 |
76,667 |
|
d(h/2) |
0,2613 |
0,0761 |
0,0611 |
0,0232 |
|
, % |
0,199 |
0,018 |
0,195 |
0,032 |
Таким образом, точность выполненных расчетов не менее 0,2 %.