

2.2.3 Расчет механических узлов дуговой печи
На рис. 2.18 показана кинематическая схема одной из конструкций механизмов подъема и поворота свода, а также перемещения электродов для печи с опорой этих механизмов на люльку.
Механизм подъема свода
Подъем и опускание свода осуществляют два синхронно работающих механизма, приводом которых являются электродвигатели 25 и червячно-винтовые редукторы 24. Свод 21 подвешен к полупорталу 19 на перекинутых через блоки 5 и 18 цепях 20 и тягах 4, связанных с червячно-винтовыми редукторами. При работе электродвигателя 25 и червячно-винтового редуктора 24 тяговый винт 24а редуктора получает поступательное движение вверх или вниз, перемещая тяги 4 цепи 20 и, тем самым, свод 21 (на высоту до 500 мм). Для синхронизации работы двух механизмов предусмотрен уравнительный вал 31, связанный с редукторами через муфты 32.
Расчет мощности электродвигателя подъема свода:
Мощность одного двигателя подъема свода, кВт:
![]() ,
,
где Qсв– сила тяжести свода, Н;Vсв– скорость подъема свода, м/с;![]() – КПД привода,
– КПД привода,![]() ;
;
![]() –
КПД блоков;
–
КПД блоков;![]() –
КПД. винтовой и червячной передачи,
–
КПД. винтовой и червячной передачи,
![]() ,
,
![]() - угол подъема винта редуктора,
- угол подъема винта редуктора,![]() =arctgt(
=arctgt(![]() );
);
t – шаг винта со средним диаметром резьбы
![]() ;
;
![]() – угол трения в резьбе,
– угол трения в резьбе,
![]() =arctgt(
=arctgt(![]() );
– коэффициент трения.
);
– коэффициент трения.
Механизм поворота свода
Для отворота свода от рабочего пространства печи вращают вал 27 с жестко закрепленной на нем плитой 30, являющейся опорой полупортала 19 и подвешенного к нему свода 21; поворотный вал 27 опирается на люльку печи через два радиальных 29 и один упорный 26 подшипники. Приводом поворота являются электродвигатель 22 и трехступенчатый цилиндрический редуктор 23, на выходном валу которого посажена коническая зубчатая шестерня, входящая в зацепление с зубчатым сектором 28, жестко насаженным на вал 27. Получая вращения от привода, зубчатая шестерня вызывает поворот зубчатого сектора 28 и вала 27 вокруг его вертикальной оси и, тем самым, поворот плиты 30 и свода печи.
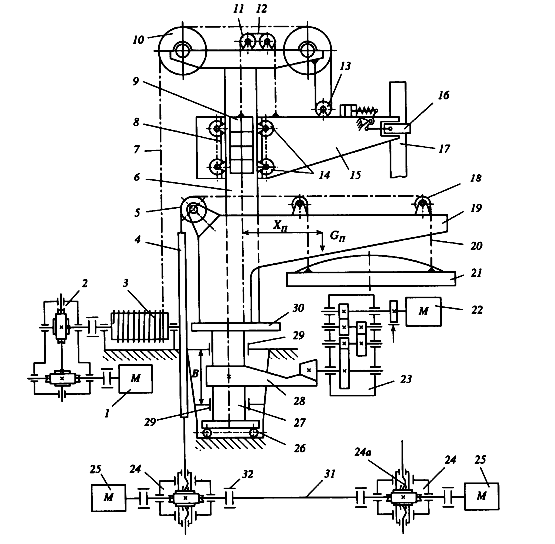
Рис. 21. Кинематическая схема механизмов подъёма, и поворота свода и перемещения электродов для печи с их опорой на люльку
1, 22, 25 – электродвигатель; 2, 23, 24 – редуктор; 3 – барабан; 4 – тяга; 5, 10, 11, 13, 18 – блок; 6 – колонна; 7, 12 – канат; 8 – каретка; 9 – груз; 14 – ходовой ролик; 15 – рукав; 16 – электродо-держатель; 17 – электрод; 19 – полупортал; 20 – цепь; 21 – свод; 24а – тяговыйвинт; 26 – упорный подшипник; 27 – поворотный вал; 28 – зубчатый сектор; 29 –радиальный подшипник; 30 – плита; 31 – уравнительный вал; 32 – муфта
Расчет мощности электродвигателя подъема свода
Для выбора двигателя поворота свода последовательно определяются следующие параметры:
Центр тяжести механизма поворота:
![]()
где Gi – сила тяжести отдельных
поворачивающихся деталей: свода,
полупортала, плиты, вала, приводов и т.
п.;
![]() –
сила тяжести всех поворачивающихся
деталей; xi – центр тяжести всех
поворачивающихся деталей.
–
сила тяжести всех поворачивающихся
деталей; xi – центр тяжести всех
поворачивающихся деталей.
Статический момент поворота:
![]() ,
,
где r1, r2, r3 – радиусы опор в верхнем и
нижним радиальных и в упорном подшипниках
с соответствующими коэффициентами
трения ;
![]() ;h– расстояние между радиальными
подшипниками.
;h– расстояние между радиальными
подшипниками.
Момент, приведенный к валу электродвигателя:
Mдв = Mп/i,
где i –передаточное отношение привода.
Мощность электродвигателя поворота, кВт
![]()
где
![]() – КПД привода;
– КПД привода;![]() –
частота вращения двигателя.
–
частота вращения двигателя.
Механизм перемещения электродов
Приводом этого механизма служит барабанная лебедка, включающая электродвигатель 1, червячный редуктор 2 и барабан 3. Вращение барабана вызывает перемещение вверх или вниз каната 7, перекинутого через блоки 10 и через закрепленный на рукаве 15 блок 13, и тем самым вертикальное перемещение каретки 8 с рукавом 15, несущим электрододержатель 16 с электродом 17. Каретка на ходовых роликах 14 передвигается по колонне 6; блоки 10 называют неподвижными, а перемещающийся в вертикальном направлении блок 13 – подвижным. Груз 9 с помощью перекинутого через блоки 11 каната 12 частично уравновешивает силу тяжести каретки 8.
Расчет мощности электродвигателя механизма перемещения электродов
Для выбора мощности электродвигателя механизма перемещения электродов последовательно определяются следующие величины:
Усилие Р на подвижном блоке 13 (рис. 2.18)
![]() ,
,
где
![]() -
бщая сила тяжести каретки, электрода,
механизма зажима и части токоподводящих
шин;
-
бщая сила тяжести каретки, электрода,
механизма зажима и части токоподводящих
шин;![]() – сила тяжести противовеса; а – расстояние
от центра тяжести поднимаемых масс
– сила тяжести противовеса; а – расстояние
от центра тяжести поднимаемых масс![]() до
оси ближних к центру тяжести ходовых
роликов; l – расстояние между осями
роликов, расположенных на разных сторонах
колонны; b – расстояние между осями ро-
до
оси ближних к центру тяжести ходовых
роликов; l – расстояние между осями
роликов, расположенных на разных сторонах
колонны; b – расстояние между осями ро-
ликов, расположенных на одной стороне
колонны; m – расстояние между осью
подвижного блока и осями ближних к блоку
ходовых роликов; W – коэффициент тяги,
![]()
![]() -
коэффициент трения в цапфах роликов
диаметром d; f – коэффициент трения на
ободе роликов диаметром Dp; Кр – коэффициент
реборд;
-
коэффициент трения в цапфах роликов
диаметром d; f – коэффициент трения на
ободе роликов диаметром Dp; Кр – коэффициент
реборд;![]() –
КПД противовесов.
–
КПД противовесов.
Момент на валу электродвигателя:
![]() ,
,
где
![]() –радиус барабана;
–радиус барабана;![]() ,
,![]() – передаточное отношение и КПД привода
лебедки.
– передаточное отношение и КПД привода
лебедки.
Мощность привода:
![]() ,
кВт,
,
кВт,
где
![]() – частота вращения двигателя.
– частота вращения двигателя.
При реечном приводе момент на валу электродвигателя:
![]()
![]()
где Dш – диаметр шестерни;
![]() –
передаточное отношение и к. п. д. привода
реечной передачи.
–
передаточное отношение и к. п. д. привода
реечной передачи.
Мощность электродвигателя при реечном приводе, кВт :
![]()
Момент сопротивления вращению ванны печи с металлом с суммарной силой тяжести Gпечи + Gмет зависит от сопротивления в цапфах диаметром dц ходовых роликов и от трения на ободе ходовых роликов диаметром Dx:
![]() ,
,
где
![]() ,
f, Kp – коэффициенты трения в цапфах, на
ободе роликов и на ребордах;
,
f, Kp – коэффициенты трения в цапфах, на
ободе роликов и на ребордах;![]() –
средний радиус опорного кольца.
–
средний радиус опорного кольца.
Далее выбирается электродвигатель по требуемой мощности:
![]()
Механизм наклона печи
Расчет привода механизма наклона печи предполагает последовательное определение следующих характеристик.
Момент сопротивления опрокидыванию
порожней печи имеющей массу Gп равен
![]()
где r –
величина радиуса вектора от центра
кривизны люльки до центра тяжести печи;
![]() – угол наклона радиуса вектора к
вертикальной оси печи;
– угол наклона радиуса вектора к
вертикальной оси печи;![]() – угол поворота, при вращении по часовой
стрелке знак «+», против «–».
– угол поворота, при вращении по часовой
стрелке знак «+», против «–».
Момент от сил трения качения люльки радиусом
![]()
где Gп, Gм – сила тяжести порожней печи и металла; Rл – радиус сегментов люльки; Е – модуль упругости материала колеса; b – суммарная толщина двух сегментов люльки.
Внутренний профиль пода печи представляет собой шаровой сегмент с начальным объемом металла:
![]()
где h –
высота сегмента металла;
![]() – внутренний радиус шарового сегмента.
– внутренний радиус шарового сегмента.
Сила тяжести металла
![]()
где
![]() – удельная масса расплава.
– удельная масса расплава.
Опрокидывающий момент от жидкого металла
при повороте на угол
![]() равен:
равен:![]() ,
,
где n – расстояние между центрами кривизны люльки и шарового сегмента.
Отсюда общий момент сопротивления наклону печи
![]()
Максимальный общий момент будет при
наклоне печи
![]() =
40 – 45°, когда из печи будет слит весь
металл,
=
40 – 45°, когда из печи будет слит весь
металл,![]()
Обозначим угол между вертикалью печи
и прямой отрезка, соединяющего центры
кривизны сегментов люльки печи и точки
подвески рейки, через
![]() .
Находим усилие наклона печи Рр, приложенное
к одной рейке:
.
Находим усилие наклона печи Рр, приложенное
к одной рейке:
![]()
где l – расстояние между центром кривизны сегмента люльки и точкой подвески рейки.
Максимальное усилие на рейке:
![]()
По максимальной силе определяется момент на валу каждого из двух электродвигателей:,
![]()
где
![]() –
радиус начальной окружности приводной
шестерни; i,
–
радиус начальной окружности приводной
шестерни; i,![]() – передаточное отношение и к.п.д привода.
– передаточное отношение и к.п.д привода.
Статическая мощность двигателя, кВт:
![]() ,
,
где
![]() – частота вращения двигателя,
– частота вращения двигателя,![]() .
При расчете механического оборудования
и исполнительных механизмов печей к
проектным расчетам предъявляются
повышенные требования с точки зрения
точности и качества, так как при работе
с большими массами жидкого металла
недопустимы сбои и отказы в работе
техники.
.
При расчете механического оборудования
и исполнительных механизмов печей к
проектным расчетам предъявляются
повышенные требования с точки зрения
точности и качества, так как при работе
с большими массами жидкого металла
недопустимы сбои и отказы в работе
техники.