

md_oglobin
.pdfР а з д е л V
МАРКШЕЙДЕРСКИЕ РАБОТЫ ПРИ РАЗРАБОТКЕ МЕСТОРОЖДЕНИЙ
ОТКРЫТЫМ СПОСОБОМ
Г л а в а XXIV
МАРКШЕЙДЕРСКИЕ СЪЕМКИ НА КАРЬЕРАХ
§ 164. Основные задачи маркшейдерской службы карьеров
Различают следующие этапы открытой разработки месторождений: подготовка карьерного поля к отработке, осушение поля, строительство карьера, подготовка запасов полезного ископаемого к добыче, вскрышные и добычные работы. Каждый этап работ выполняется с участием маркшейдерской службы, в задачи которой входит повседневный контроль за соответствием выполненных работ утвержденному проекту.
В период подготовки карьерного поля к отработке маркшейдерская служба производит комплекс горизонтальных и вертикальных съемок, на основании
которых |
создается |
г е н е р а л ь н ы й п л а н п о в е р х н о с т и к а р ь - |
е р н о г о |
п о л я , |
являющийся основой для проектирования поверхностного |
комплекса зданий и сооружений, располагаемых на борту карьера и в пределах промплощадки. При осушении карьерного поля маркшейдерская служба выполняет весь комплекс работ по вынесению в натуру с проекта дренажных выработок, съемку пройденных дренажных выработок и задание направления при сбойке дренажных скважин с подземными выработками. Объем этих работ сравнительно мал, а методика выполнения не отличается от методики съемочных работ при подземной разработке месторождений.
При строительстве и эксплуатации карьеров маркшейдерская служба увязывает плановые объемы добычи и вскрыши с проектным заданием и календарным планом, составляет графическую основу плана, весь необходимый комплекс разрезов и планов по каждому рабочему горизонту, производит съемку горных выработок, на основании которой составляет поуступные планы карьера и необходимые разрезы, участвует в планировании буровзрывных работ н осуществляет контроль за их соответствием утвержденному проекту: осуществляет учет добычи полезного ископаемого и пород вскрыши, учет движения запасов, потерь и разубоживания полезного ископаемого.
Объекты и виды маркшейдерских съемок на карьерах. Основными объектами маркшейдерских съемок на карьерах являются: контуры бровок породных и рудных (угольных) уступов, буровзрывные скважины, транспортные пути карьера, линии электросети и подстанции, геологические элементы уступов (по указанию геологической службы), внутренние отвалы пустых пород и склады руд, граница оползней и водные источники. Кроме того, имеются следующие объекты съемок вне контура карьера; отвалы пустых пород и склады полезного ископаемого, подъездные транспортные пути, сооружения и здания в пределах генплана карьера, линии электропередач, дренажные водопонизительные скважины.
.408
Съемки контуров бровок уступов и буровзрывных скважин производятся в тех местах, где проектируются и готовятся к взрыву эксплуатационные блоки, прочих объектов — по мере необходимости, в случае изменения их положения. Съемка складов добытого полезного ископаемого производится ежедекадно или ежемесячно, в зависимости от принятой системы учета добытых руд, а съемка границ породных отвалов — один раз в полгода. Инструментальная съемка геологических элементов выполняется в присутствии геолога и по его указаниям.
Точность съемок зависит от масштаба принятых на карьере планов. В настоящее время на большинстве карьеров планы карьеров составляют в масштабе 1 : 1000, а планы поверхности — в масштабе 1 : 2000 или 1 : 5000. В соответствии с этими масштабами выбирают методы съемки, обеспечивающие точность планов принятого масштаба.
Из различных видов съемок наибольшее распространение в практике открытых разработок пока что имеет тахеометрическая съемка. В отдельных случаях производят ординатолинейную и профильную съемки. На многих горных предприятиях начинают успешно применять наземную и воздушную стереофотограмметрическую съемку. Этот вид съемки является наиболее производительным и перспективным и поэтому в ближайшие годы он станет преобладающим методом съемок на карьерах.
§ 165. Опорная сеть маркшейдерской съемки на карьерах
Маркшейдерская съемка на карьерах должна выполняться на основе опорной геодезической сети, координаты пунктов которой определены в общегосударственной системе координат. В качестве такой опорной сети может быть использована триангуляция I, II, III и IV классов, а также полигонометрии и трилатерация соответствующей точности и геодезические сети местного значения. В качестве высотного обоснования съемок карьера могут быть использованы
реперы нивелирных ходов I, II, III и IV классов. |
|
Конструкция рассматриваемых опорных сетей полностью зависит |
|
от формы карьера и системы его вскрытия. Н а |
к а р ь е р а х |
и а г о р и о г о т и п а (Магнитогорский, Качканарский и др.) |
|
постоянные опорные пункты образуют цепь треугольников и рас-
полагаются на вершинах окрестных гор. При о д |
п о с т о р о н н е м |
р а з в и т и и к а р ь е р а пункты опорной |
сети располагаются |
на неподвижном борту в виде цепи треугольников. Подобное рас-
положение пунктов характерно для у г о л ь н ы х |
карьеров, отра- |
|||||
батывающих систему пологих |
пластов. На |
карьерах с |
к о н ц е н - |
|||
т р и ч е с к о й |
с и с т е м о й |
о т р а б о т к и |
опорные |
пункты |
||
располагаются по периметру предельного контура |
карьера, |
обра- |
||||
зуя простейшие |
центральные |
системы |
(рис. 249). |
Центральный |
||
пункт в таких |
системах, вследствие трудности |
его |
сохранения, |
|||
/(Г»
обычно является временным и используется только при наблюдении и уравнивании сети. Подобные опорные сети существуют на Сибайском, Гайском и Блявинском карьерах. На некоторых карьерах, располагающихся на равнинной местности, опорную сеть создают с помощью полигонометрии.
Рис. 249. Конструкция опорной сети карьера при концентрическом развитии горных работ
Сеть триангуляции или полигонометрии в районе карьера сгущается вставкой дополнительных пунктов, закладываемых на бортах карьера и внутри его в местах, где обеспечивается наиболее длитель-
А |
с |
q |
с |
с |
н а я |
сохранность |
их. |
Пункты |
||||
Ч у |
|
^гт^тЗтггг^ |
* ^ |
опорных |
сетей (за |
исключением |
||||||
У Л Ч т т Ш Г П ^ |
|
|
пунктов |
триангуляции) |
закре- |
|||||||
\ |
|
I |
|
/ |
пляются |
в зависимости от име- |
||||||
|
|
|
|
|
ющихся |
условий в соответствии |
||||||
|
|
|
|
|
с Технической инструкцией по |
|||||||
|
|
|
|
|
производству |
маркшейдерских |
||||||
|
|
|
|
|
работ. |
Сигналами |
для |
этих |
||||
|
|
|
|
|
пунктов обычно служат метал- |
|||||||
|
|
|
|
|
лические треугольные пирамиды |
|||||||
Рис. 250. |
Створная |
триада |
опорных |
высотой |
5—6 м, а |
чаще |
всего |
|||||
осветительные |
мачты |
стандарт- |
||||||||||
|
|
пунктов |
|
ного |
типа, установленные |
на |
||||||
|
|
200 м |
|
|
карьерах |
по |
их периметру |
на |
||||
расстоянии |
одна |
от другой |
и |
имеющие |
высоту |
20—25 м. |
||||||
Металлический штырь, приваренный к верхней площадке такой мачты, является верхним сигналом для пунктов опорной карьерной сети. Он должен быть центрирован над закрепленным пунктом. Такие сигналы применяются на Соколовском, Сибайском, Гайском и других карьерах.
.410
Пункты опорной сети в последующем используются для вставки точек внутрикарьерного съемочного обоснования. Эти вставки в большинстве случаев осуществляются с помощью обратных засечек. Частое использование одних и тех же пунктов опорной сети требует расположения их на борту карьера в виде сочетания правильных геометрических фигур, что позволяет в последующем решать обратные засечки с помощью простейшего аппарата математических формул. Наиболее простыми будут вычисления, когда три пункта опорной сети располагаются т о ч н о в с т в о р е и на одинаковом расстоянии один от другого (створная триада) (рис. 250). В этом
случае |
углы |
ф и |
вычисляют |
по |
|
А |
|
|||||
формулам: |
|
|
|
|
|
|
|
я |
Е* |
|||
|
|
|
|
|
|
|
|
|
|
|||
ctg ср = ctg а - |
2 ctg у; |
|
(XXIV, 1) |
|
Г |
|||||||
|
|
Ш Г П ^ Ш П П Е Ш ! ^ ^ |
||||||||||
ctg г|э = |
ctg Р — 2 ctg у. |
|
(XXIV,2) |
|
|
I- |
||||||
|
|
|
|
|
|
|
|
|
|
|
||
Далее |
решением |
двух |
прямых |
|
|
Ё |
||||||
засечек |
определяют |
координаты |
х |
|
|
|||||||
и у точки |
Р. |
|
|
|
|
|
|
|
|
-ГЛс |
||
Кроме |
створных |
триад |
опорных |
|
|
|||||||
пунктов |
|
могут |
быть |
использованы |
|
|
|
|||||
п р я м о у г о л ь н ы е |
т р и а д ы |
|
|
|
||||||||
(рис. 251). В |
этом |
случае пункты |
Рис. 251. Прямоугольная |
триада |
||||||||
опорной |
сети образуют |
прямоуголь- |
||||||||||
|
опорных пунктов |
|||||||||||
ный треугольник с двумя |
равными |
|
||||||||||
|
|
|
||||||||||
катетами. Углы |
ср и я|э при |
этом |
находят |
по формулам: |
|
|||||||
c t 6 Y
CtglJ):
1 + c t g y - c t g a . ctg у •
1 + ctgy — ctgp ctgY
(XXIV,3)
(XXIV,4)
§ 166. Съемочное обоснование карьеров
На основе имеющейся опорной сети на всей площади карьера дополнительно закладывают и определяют пункты съемочного обоснования, с которых производят непосредственную съемку бортов, буровзрывных скважин и других объектов, подлежащих нанесению на план. Обычно пункты съемочного обоснования в карьере существуют недолго, а потому должны рассматриваться как временные. Плановое положение этих пунктов должно быть определено с ошиб-
кой не более 0,2 м, |
а высотное с ошибкой ±0,1 м по отношению |
к пунктам опорной |
сети. |
Плановое положение пунктов съемочного обоснования определяют прямой, обратной или азимутальной засечкой, проложением теодолитного хода или разбивкой эксплуатационной сетки. Сущность решения обратной и прямой засечек известна из курса Геодезия.
.411
Необходимо лишь напомнить некоторые основные требования при
решении |
этих задач. |
|
|
|
|
|
|
|
|
|
П р и |
с п о с о б е |
п р я м ы х |
з а с е ч е к |
измеряют |
все |
три |
||||
угла в |
треугольнике |
и |
угловую невязкую |
распределяют |
поровну |
|||||
на все углы. Предельная |
величина |
угловой невязки |
равна |
1 \ Угол |
||||||
|
|
|
|
при определяемом пункте |
||||||
|
|
|
|
не должен быть меньше 30° |
||||||
|
|
|
|
и больше 120°. При вставке |
||||||
|
|
|
|
точки |
способом |
обратной |
||||
|
|
|
|
засечки визирование |
осу- |
|||||
|
|
|
|
ществляют |
не |
менее |
чем |
|||
|
|
|
|
на четыре пункта |
опорной |
|||||
|
|
|
|
сети. Углы у определяе- |
||||||
|
|
|
|
мой |
точки |
не |
должны |
|||
|
|
|
|
быть |
меньше |
30°. |
|
|||
|
|
|
|
|
С у щ н о с т ь |
а з и - |
||||
|
|
|
|
м у т а л ь н о й з а с е ч - |
||||||
|
|
|
|
к и состоит в следующем. |
||||||
|
|
|
|
С |
определяемой |
точки Р |
||||
Рис. 252. Схема азимутальной засечки |
(рис. 252) |
наблюдаются |
|
три опорных пункта А, В, |
|||
|
|||
|
С и, кроме |
того, известно |
|
направление на пункт О. Используя дирекционный угол (ОР), по
измеренным |
горизонтальным |
углам |
Р2, рз определяют дирек- |
ционные углы направлений PA, РВ, PC. Учитывая, что дирекци- |
|||
онные углы |
между твердыми |
пунктами |
(АВ) и (ВС) известны, |
ХкУк)
Рис. 253. Схема теодолитного хода, длины сторон которого определяются по способу проф. А. И. Дурнева
углы rl f yl f у2, го определяют как разность соответствующих дирекционных углов. Треугольники решают обычным путем.
Вставку точек с помощью азимутальных засечек выгодно производить в том случае, когда одновременно вставляют несколько точек. Этот способ, предложенный проф. А. И. Дурневым, состоит в следующем.
.412
На уступе карьера закрепляют временные пункты съемочного обоснования а, Ь, с, . . ., i, к, с которых должны быть видны пункты опорной сети А, В и С,
находящиеся на борту карьера (рис. 253). Теодолитом измеряют горизонтальные углы а1 , а2 , р2 и т. д., а также длины первой и последней сторон хода —
— аЬ и ik.
В первом треугольнике известны стороны аЬ и два угла — at , |
|||
воляет вычислить сторону |
|
sin |
|
|
АЪ = аЬ • |
^ ) |
|
|
sin (04 + |
||
Определив сторону АЬ, |
можно вычислить |
стороны Ьс и Ас: |
|
Ьс — АЬ-sin(a2-hp2) . sin р2
Ас= АЬ, sin ou
—
sinp2
что поз-
(XXIV,5)
(XXIV,6)
(XXIV,7)
Рис. 254. Применение способа проф. А. И. Дурнева для обоснования съемки отвалов
Таким образом могут быть вычислены длина всех сторон теодолитного хода, а следовательно, и координаты всех пунктов съемочного обоснования.
Способ проф. А. И. Дурнева может быть также применен для обоснования съемки отвалов (рис. 254). В этом случае точки А, В, С играют лишь вспомога-
тельную роль и вычисление их плоских координат необязательно.
Теодолитный ход для определения планового положения пунктов съемочного обоснования прокладывают между пунктами опорной сети рис. 255 или делают замкнутым. Углы хода измеряют теодолитом не ниже 30" точности одним приемом. Длину сторон измеряют рулетками или дальномерами в прямом и обратном направлениях. Допустимое расхождение в измеренных расстояниях 1 : 1000. Угло-
вая |
невязка |
хода не должна превышать величины ±30" |
У п , |
где |
п — число |
измеренных углов, а линейная невязка хода |
не |
должна быть более 1 : 3000. |
|
||
Эксплуатационные сетки пунктов внутрикарьерного обоснования могут применяться для неглубоких карьеров в условиях равнинного рельефа. Обычно такие сетки создаются до начала вскрышных работ и представляют собой сеть квадратов, вершины которых закреплены в натуре. Расстояние между вершинами квадратов такой сетки колеблется от 20 до 100 м.
.413
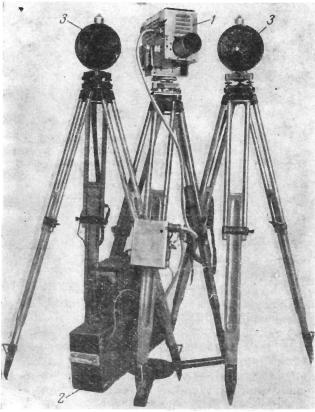
Рис. 255. Теодолитный ход для определения пунктов обоснования съемки карьера
Рис. 256, Комплект свето^ дальномера ТД-1
Плановое положение пунктов съемочного обоснования больших карьеров может быть определено также с помощью радио- и светодальномеров. На карьерах могут быть использованы светодальномеры ТД-1 (конструкции ВНИМИ) и «Кристалл» (конструкции ЦНИИГАиК).
Искомое расстояние D светодальномером определяют по времени t, за которое световой луч проходит это расстояние в прямом и обратном направлении, т. е.
где с = 299792,6 ± 0,6 км/сек — скорость света.
Поскольку измеряемые расстояния сравнительно малы, а скорость света огромна, время t не может быть определено непосредственно. Его определяют косвенным путем по величине сдвига фаз между посланным и принятым потоком света.
Комплект светодальномера ТД-1 (рис. 256) состоит из основного прибора 1 (приемопередатчика), аккумуляторной батареи 2 и двух отражателей 3.
При измерении расстояний основной прибор центрируют над начальной точкой, а отражатель — над конечной. Наблюдатель, глядя в окуляр, вращает ручку изменения частоты колебания (изменяет длину волны модулированного светового потока) и добивается такого положения, когда в окуляре наблюдается минимальное свечение линз отражателя. По шкале прибора берут отсчеты, по которым вычисляют искомое расстояние. В зависимости от внешних условий для измерения одной линии требуется 20—40 мин.
Светодальномером ТД-1 измеряют расстояния |
от 140 до 5000 м |
||
с ошибкой |
± 1 см, светодальномером |
«Кристалл» |
измеряют расстоя- |
ния от 100 |
до 3000 м с ошибкой |
±2— 3 см. |
|
Измерение расстояний радиодальномером производится аналогичным образом. Для этого может быть использован радиодально-
мер РДГ, |
позволяющий измерять расстояния от 200 м до 30 км |
с ошибкой |
± 3 см. |
При использовании радиоили светодальномеров плановое положение пунктов обоснования карьера может быть определено пятью способами: трилатерации, теодолитных ходов, линейных засечек, створных точек и полярным.
При способе трилатерации на карьере создают сеть треугольников, в которых измеряют длину всех сторон; в теодолитных ходах длину сторон измеряют радиоили светодальномером. В линейных засечках измеряют длину двух сторон от известных пунктов до определяемого. При способе створных точек пункты выставляют в створе двух опорных пунктов, а расстояния от них измеряют радиоили светодальномером. При всех указанных способах обеспечивается необходимая точность определения планового положения пунктов съемочного обоснования карьера.
.415
Свето- и радиодальномеры пока еще не получили широкого распространения при съемках на карьерах. Необходимы дальнейшие исследования в этом направлении.
§ 167. Передача координаты z на пункты съемочного обоснования
Наиболее часто координаты z передаются на пункты съемочногообоснования способом тригонометрического нивелирования. Применение геометрического нивелирования для этих целей затруднительно в связи со специфическими условиями рельефа карьеров.
.417
Значительно упрощается геометрическое нивелирование при при_ менении нивелиров с наклонным лучом визирования типа HJI-3.
Сущность тригонометрического нивелирования состоит в том, что при вставке временных опорных точек измеряются вертикальные углы на условные точки сигналов пунктов триангуляции, отметка
которых обычно известна (рис. 257).
Зная расстояние между пунктами и измеренный вертикальный угол б, координату zP новой временной точки Р определяют по формуле
|
Z p ^ z A - L t g b - i , |
(XXIV,8) |
где L — горизонтальное расстояние от исходного пункта А до вновь |
||
вставляемой точки Р; |
|
|
i — высота |
инструмента; |
|
б—'угол |
наклона визирного луча. |
|
Обычно при вставке точки вертикальный угол измеряют не менее чем на два известных пункта. Координата zp определяется при этом как среднее из отдельных определений.
Ошибка тригонометрического нивелирования
|
|
•шГ'тШ |
+ m l t g 2 8 > |
(XXIV,9) |
|
|
|
|
^ * b |
||
где т ь |
— ошибка |
измерения |
угла; |
|
|
mL |
— ошибка |
горизонтального |
расстояния |
L, ле. |
|
|
§ 168. Тахеометрическая и ордннатолинейная съемки |
||||
|
|
на |
карьерах |
|
|
Тахеометрическая съемка |
является наиболее |
распространенной |
|||
на карьерах. Основным ее объектом являются характерные точки
бровок уступа, т. е. такие, которые определяют их |
контур. Разли- |
чают неровности контура бровки первого и второго |
порядка. Н е - |
а |
|
А |
6 |
Рис. 258. Неровности контура бровки |
карьера |
р о в н о с т я м и п е р в о г о п о р я д к а |
считают отклонения |
контура от прямолинейной формы, образованные случайными вывалами бровок при взрыве или ковшом экскаватора при экскавации
взорванной горной |
массы (рис. 258, а). Н е р о в н о с т и |
в т о - |
р о г о п о р я д к а |
обусловлены изменением направления |
фронта |
работы экскаватора и образуют явно выраженные углы, в вершинах которых происходит поворот целых участков бровки (рис. 258, б).
Неровности первого порядка не оказывают влияния на величину площади отработанного контура и поэтому нет необходимости фиксировать их на маркшейдерском плане. Неровности же второго порядка образуют контур бровки и поэтому съемочные пикеты должны располагаться именно в углах, образующих эти неровности. Таким образом, расстояние между съемочными пикетами полностью зависит
27 Заказ 1612 |
417 |