

ЛЕК+ЛАБА(СУМ) / Лек / 15ЭПА-3=
.pdf1
3. ДАТЧИКИ ФИЗИЧЕСКИХ ВЕЛИЧИН
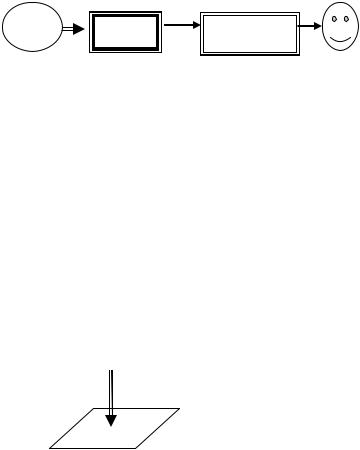
Напомним, что в разделе 1цепь мониторинга, анализа и отображения информации была представлена в виде измерительного канала (ИК):
ФВ |
ДФВ |
КС |
ИП |
|
ИП-мера
ИП |
КС |
КВ |
КС |
|
|
Из рисунка видно, что всякий ИК начинается датчика физической величины ДФВ ─ средства измерения, выполняющего первичное измерительное преобразование ФВ путем ее «отбора» из ТОУ в виде физического сигнала определенного типа. ДФВ выполняет обработку входного физического сигнала и, работая в составе системы, формирует выходной измерительный сигнал электрического типа количественно характеризующего текущее значение измеряемой ФВ. Если ДФВ работает вне системы, то его выходной сигнал может быть и не электрического типа. Например: в домашнем ртутном термометре или барометре сигнал датчика представлен сигналом механического типа.
Исходя из особенностей решаемых задач систем автоматики, ДФВ может быть выполнен как стандартизированное или как нестандартизированное устройством.
В данном курсе лекций под ДФВ будем понимать только стандартизированные устройства. Каждое такое устройство должно быть определено как тип средства измерения,
должно иметь сертификат соответствия определенному типу средства измерения, зареги-
стрированный в Государственном реестре (Госреестр) средств измерений РФ.
Поскольку каждый ИК начинается с ДФВ, то ДФВ определяет требования к структуре и характеристикам соответствующего ИК.
Каждый ДФВ, как средство измерения, характеризуется:
типом входного физического сигнала ФВ (температура, давление, уровень и т.д.) и диапазоном его изменения ─ X;
типом выходного электрического сигнала: напряжение, сила тока, сопротивление постоянному току, частота, число импульсов и т.д. и диапазоном изменения сигнала ─ Y;
законом измерительного преобразования входного сигнала в выходной: Y=F(X);
основной погрешностью измерительного преобразования;
дополнительными погрешностями измерительного преобразования, вызванными воздействием на процесс измерительного преобразования внешних влияющих факторов;
организацией электропитания (от автономного источника, от внешнего напряжения постоянного тока, от внешнего напряжения переменного тока; потребляемой мощностью; допустимым диапазоном изменения напряжения питания);
конструктивными характеристиками (габариты, масса, защита от воздействия воды и пыли, защита от тряски, вибраций, ударов и т.д.).
Простейшая структура ИК представлена на рис. 3.1: в ней выходной сигнал ДФВ поступает непосредственно на вход компонента вычислительного КВ.
Поскольку в соответствии с определением КВ на его вход может поступать только цифровой сигнал, то реализация простейшей структуры измерительного канала становится возможной только при одном условии: если выходной сигнал ДФВ представлен в цифровой форме.
2
ФВ |
ДФВ |
ВК |
|
Рис.3.1. Измерительный канал простейшей структуры
В системах автоматики создание ИК простейшего типа всегда желательно, но не всегда возможно. Ограничения связаны не только с тем, что ДФВ с цифровым выходным сигналом может быть сложнее и дороже, но и с тем, что он может иметь усложненное конструктивное решение, повышенное энергопотребление, увеличенные размеры и вес. А это при решении множества задач может быть категорически неприемлемым. По этой причине в настоящее время при создании систем автоматики наиболее широко применяются ДФВ с выходным аналоговым сигналом, которые и рассмотрим в данной лекции.
3.1. Датчики давления
Напомним, что давлением Р называют отношение Р=F/S: абсолютной величины нормального (т.е. действующего перпендикулярно к поверхности тела) вектора силы F к площади S этой поверхности.
F
S
Единицы измерения давления определяются одним из двух способов:
через высоту столба жидкости, уравновешивающей измеряемое давление: в единицах водяного столба при 4°С (мм вод. ст. ) или ртутного столба при 0°С(мм рт. ст., или Торр);
через единицы силы и площади (в СИ – это Н (Ньютон) и м2: единица давления
Паскаль Па=1н/м2, килоПаскаль (1кПа=103Па), мегаПаскаль (1МПа =1•103кПа =1•106Па); в
МКГСС (метр, килограмм-сила, секунда) сила измеряется в килограммах силы (1 кгс≈9,8 Н),
аединицы давления – кгс/м2 и кгс/см2, получившей название технической или метрической
атмосферы (ат); в СГС (сантиметр, грамм, секунда) единицей силы является дина (1 дин=10–5Н), а единицей давления –бар (1 бар=1 дин/см2).
Существует одноименная внесистемная, метеорологическая единица бар, или стан-
дартная атмосфера (1 бар=106 дин/см2; 1 мбар = 10–3 бар = 103 дин/см2), что иногда, вне контекста, вызывает путаницу. Кроме указанных единиц на практике используется такая внесистемная единица, как физическая, или нормальная атмосфера (атм), которая эквивалентна уравновешивающему столбу 760 мм рт. ст.
В табл.3.1 указаны коэффициенты перевода одних системных или внесистемных единиц давления в другие: например, одной технической атмосфере соответствует давление 0,980665 в барах (здесь бар является внесистемной единицей).
На практике из-за использования разнородного гидравлического и измерительного оборудования разных изготовителей и стран, причем нередко давнего года выпуска, постоянно возникает потребность перевода одних единиц давления в другие. Для приблизительных оценок и расчетов давления с относительной погрешностью не более 0,5% полезно пользоваться следующими соотношениями:

3
1 ат = 1 кгс/см2 = 104 кгс/м2 =0,97 атм = 0, 98•103 мбар = 0,98 бар = 104 мм вод.ст. = 10 м вод.ст =735 мм рт.ст. = 0,98•105 Па = 98 кПа= 0,098 МПа.
Таблица 3.1.
3.1.1. Назначения датчиков давления
В системах автоматики применяются датчики давления 4-х назначений.
Для выделения этих назначений рассмотрим рис. 3.2, на котором показаны два базовых уровня давления, относительно которых измеряются давления:
уровень абсолютного вакуума, или абсолютного нуля давления, т.е. идеализированного состояния среды в замкнутом пространстве, из которого удалены все молекулы и атомы;
уровень атмосферного (барометрического) давления (ДБ), которое зависит от тем-
пературы воздуха и высоты над уровнем моря.
Рис. 3.2. Измеряемые значения давлений.
Принцип отбора давления датчиками основывается на использовании сенсорного разделительного элемента (СРЭ) – элемента первичного измерительного преобразования, который может иметь различные конструктивные исполнения, но всегда выполняющий одну функцию – вычитания силовых воздействий по рис.3.2, определяемых назначением конкретного датчика:
Рх |
|
Рх |
ДБ |
Рх |
ДБ |
Рх1 |
Рх2 |
|
Вакуум |
|
|
|
. |
|
|
СРЭ |
абсолютн. |
|
|
|
|
|
|
а) ДА |
|
|
б) ДИ |
в) |
ДВ |
|
г) ДД |
|
Рис.3.3. |
Схемные решения отбора давления |
|
|
|
||
4
измерения абсолютного давления (ДА) относительно абсолютного вакуума. Датчики, измеряющее это давление, называются датчиками давления абсолютного (ДДА);
измерения избыточного давления (ДИ), определяемого как: ДИ= ДА─ДБ. Датчики, измеряющие это давление, называются датчиками давления избыточного (ДДИ);
измерения вакууметрического давления(ДВ), определяемого как: ДВ= ДБ─ДА. Дат-
чики, измеряющие это давление, называются датчиками давлением разряжения (ДДР);
измерения дифференциального давления (ДД), определяемого как разность абсолютных или избыточных давлений: ДД= ДА1 ─ ДА2, ДД= ДИ1─ ДИ2 .Соответственно датчики, измеряющие разность давлений, называются датчиками давления дифференциального
(ДДД).
Датчик давления любого из перечисленных выше назначений решает три задачи:
отбора давления осуществляется подачей силового измеряемого воздействия по рис.3.3, выполняемого жидкостью, паром или газом, на сенсорный разделительный элемент СРЭ, работающий в режиме упругой деформации. Слово «упругая» означает, что при подаче силового давления СРЭ деформируется, а после снятия силового давления восстанавливается в исходное состояние;
преобразования входного силового воздействия ─ измерительного сигнала механического типа в измерительный сигнал электрического типа;
формирования выходного измерительного сигнала, количественно характеризующего текущее значение давления.
Особенности отбора давления по рис.3.3. на многообразии объектов управления и контроля состоит в следующем:
в широчайшем динамическом диапазоне входного сигнала: отбор давления осуществляется от 10–8 Па в электровакуумном оборудовании до 103 МПа при обработке металлов давлением;
в необходимости выдерживания при отборе давления силового воздействия различных измеряемых сред ─ жидкостей, паров, газов различного химического состава и уровня агрессивности;
в обеспечении работоспособности отбора давления в широком температурном диапазоне внешней среды: от минимальных минусовых (до минус 80°С) до сотен °С положительных температур.
3.1.2. Преобразование входного силового воздействия в измерительный сигнал
Преобразование входного силового воздействия в измерительный сигнал электричес-
кого типа в подавляющем большинстве производимых в настоящее время датчиков давле-
ния осуществляется на основе сенсорного разделительного элемента СРЭ по рис.3.3 и тен-
зорезисторов – элементов, выполняющих измерительное преобразование деформации СРЭ в сигнал, воспринимаемый электрической цепью.
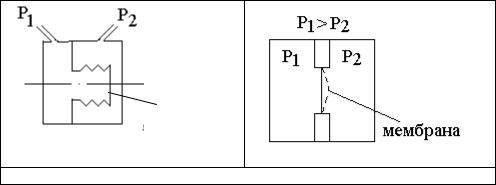
1) СРЭ в зависимости от области применения датчика давления реализуется либо в виде упругих чувствительных элементов типа сильфона или мембраны (рис.3.4):
сильфон
Рис.3.4. Разделительные элементы
5
Чаще всего в качестве чувствительного элемента используется мембрана.
Измеряемое давление Р подается либо непосредственно на разделительную мембрану, которая одновременно является и измерительной, либо на мембрану разделительную, которая соединена с мембраной измерительной, например, – жестким штоком. И разделительная, и измерительная мембраны работают в режиме упругой деформации.
Для каждой измерительной мембраны (далее просто – мембрана) обязательно указывается не только диапазон ее рабочего изменения (упругой деформации), но и максимальное давление перегрузки, которое мембрана должна выдерживать без остаточной деформации. Последнее очень важно, т.к. в гидравлических системах могут иметь место гидроудары, при которых давление в трубопроводе может в разы превышать нормированное максимальное значение входного давления.
Мембраны изготавливаются из нержавеющей стали, тантала, титана, нержавеющей стали с тефлоновой футеровкой, тантала с тефлоновой футеровкой и т.д.
2) Под тензорезистором понимают элемент электрической цепи, который изменяет свое электрическое сопротивление под влиянием внешнего силового воздействия.
Вдатчиках давления силовое воздействие на тензорезисторный преобразователь осуществляется при деформации измерительной мембраны, на которую этот тензорезистор устанавливается.
Вполупроводниках тензорезистивный эффект выражен значительно сильнее, чем в проводниках, а среди полупроводников лучшие характеристики у кристаллов кремния. По сравнению с германиевыми кремниевые кристаллы имеют более высокую тензочувствительность, большую механическую прочность и более широкий рабочий температурный диапазон. По этой причине при производстве общепромышленных датчиков давления преимущественное применение получила технология изготовления тензорезистора ─ «кремний на сапфире». При реализации этой технологии обеспечивается возможность создания на одном кристалле кремния не только одного или нескольких тензорезисторов, но и элементов схемы,
спомощью которой считывается информация о состояниях тензорезисторов, т.е. о степени деформации мембраны.
Во всех датчиках давления реализуется следующая цепь измерительных преобразований входного давления Р в электрический сигнал U, пропорциональный Р:
Преобразование силового воздействия Р в механи-
Рческое перемещение L (деформацию) измерительной мембраны
Преобразование механи- |
|
Преобразование |
|
ческого перемещения L |
|
изменения сопротивления |
|
измерительной мембраны |
|
тензорезистора в элект- |
U |
в изменение сопротивления |
|
рический сигнал |
|
тензорезистора |
|
|
|
|
|
|
|
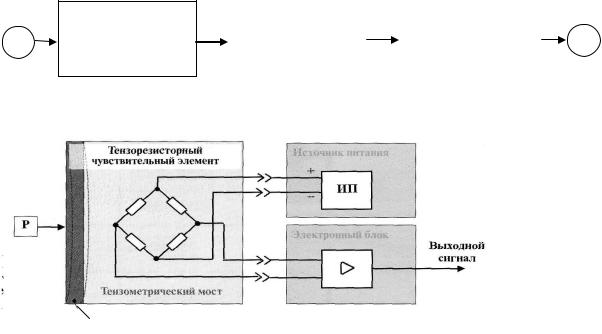
3) На рис.3.5 приведена упрощенная схема измерительного преобразователя давления (датчика), на которой показано, что входной сигнал Р воздействует на мембрану.
Мембрана
Рис.3.5. Измерительный преобразователь давления
6
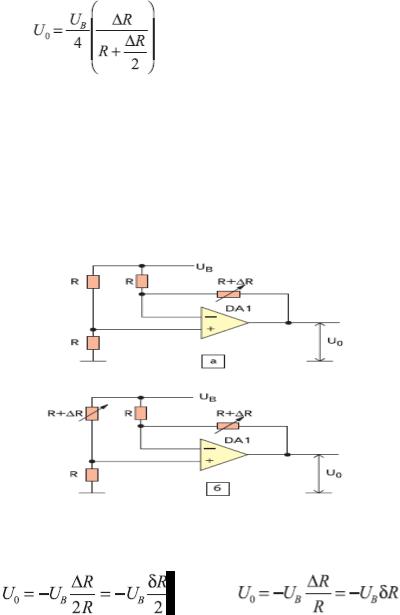
Упругая деформация мембраны приводит к изменению сопротивления тензорезистора, включенного в плечи неуравновешенного моста постоянного тока. Известно, что мост имеет две диагонали: к одной подключается напряжение Uв. источника питания (ИП), а вторая диагональ является измерительной. На выходе измерительной диагонали, если все сопротивления моста равны сопротивлению R тензорезистора при нуле силового воздействия, напряжение неуравновешенного моста Uо определяется формулой:
При изменении давления Р на мембрану сопротивление тензорезистора будет изменяться в диапазоне R. Как видно из формулы, значение Uо зависит линейно от Uв и нелинейно от R. Это плохо. И от этого недостатка разработчикам датчиков давления необходимо избавляться в процессе последующей обработки выходного сигнала тензометрического моста.
4) Линеаризацию зависимости сигнала Uо можно произвести путем включения тензорезистора (R+ΔR) в цепь отрицательной обратной связи операционного усилителя DA1 в соответствии с рис. 3.6а. Аналогичный тензорезистор может быть включен в другую ветвь моста
(рис.3.6б):
Рис.3.6. Схемное решение линеаризации выходного напряжения Uо
Для схем по рис. 3.6а и рис. 3.6б соответственно справедливы зависимости:
где δR = R/R ─ относительное приращение сопротивление тензорезистора. Как видно из этих формул в схемном решении на базе операционного усилителя зависимость Uо от R линейна.
Таким образом, задача линеаризации зависимости Uо от R решена. Но сохраняется линейная зависимость Uо от Uв . А это значит, что нестабильность напряжения питания Uв будет влиять на точность измерительного преобразования.
5) Влияние нестабильности питающего напряжения на результат измерительного преобразования исключается в схемном решении на базе микропроцессора по рис.3.7, в котором выходной сигнал мостовой схемы Uо подается на вход АЦП (AIN+) микросхемы микроконтроллера DD1 (относительно (AIN─), а на второй вход АЦП (REFin) подается сигнал Uref с резисторного делителя измерительной диагонали: Uref = 0,5 Uв, Uв=2Uref.

7
Измеренное значение Uв подставляется в приведенные выше формулы вычисления Uо по результату АЦП и, таким образом, исключается зависимость Uо от R от нестабильности напряжения питания.
Рис. 3.7.. Схемное решение исключения зависимости Uо от нестабильности Uв
6) На рис.3.5 совокупность мембраны и тензометрического моста выделена в виде
тензорезисторного чувствительного элемента (ТРЧЭ). Такой элемент в настоящее время производят как конструктивно законченное изделие-полуфабрикат датчика давления.,
В основе ТРЧЭ – металлическая мембрана, на которой установлен тензорезисторный чувствительный элемент в виде сапфировой пластины с нанесенной на ней мостовой схемой, в том числе с использованием схемных решений по рис.3.6, 3.7, и конструктивное оформление, обеспечивающее удобный отбор давления.
Пример конструктивного исполнения ТРЧЭ показан на рис.3.8 ─ «Сенсор высокого давления: 500 МПа (5000 кгс/см2)», осуществляющее пропорциональное преобразование давления в электрический сигнал.
Рис.3.8. Сенсор высокого давления
ТРЧЭ по рис.3.8 решает задачу монтажа датчика по месту измерения давления (резьба с определенным шагом), обеспечивает работу чувствительного блока в заданном диапазоне рабочих температур (от –65°С до +125°С) и взаимодействие мембраны с агрессивной измеряемой средой: азот, кислород, углекислый газ, водород, вода морская, толуол, фенол, бензин, формальдегид и их смеси, органические и неорганические масла.
Поскольку при отборе давления на датчик оказывается силовое воздействие, то важное значение приобретает решение вопроса монтажа датчика на трубопроводе или какой-то емкости, в которых контролируется давление. Это решается с помощью резьбового соединения (см. рис.3.6).
Конструкция ТРЧЭ по рис.3.8. имеет следующие положительные стороны:
обеспечивает полную диэлектрическую изоляцию тензорезисторов,
обеспечивает сохранность герметичности даже при разрушении кристалла от перегрузки (защита от разгерметизации),
обеспечивает стабильность механических свойств сапфировой подложки,
8
обеспечивает защиту кристалла от среды силового воздействия непосредственно металлической мембраной.
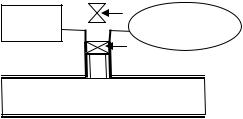
На рис.3.9 показано, что резьбовое соединение «вваривается» в трубопровод, в котором измеряется давление. В это резьбовое соединение часто и устанавливается датчик. Но с позиции удобства эксплуатации в резьбовое соединение устанавливается кран Кр1, которым при необходимости может быть перекрыта подача давления в датчик. Далее устанавливается устройство, к которому резьбовым способом подключаются ДФВ для дистанционного и манометр для местного визуального контроля давления. При наладке ДФВ выполняется операция «контроля нуля избыточного давления»: для выполнения этой операции кран Кр1 закрывается, а кран Кр2 – открывается и обеспечивает подачу на входы ДФВ и манометра атмосферного давления.
Кр2
ДФВ 
 Манометр
Манометр
Кр1
Трубопровод
Рис.3.9. Установка для отбора давления
ТРЧЭ, являясь основой для создания датчика давления, имеет следующие технологические недостатки:
измерительное преобразование входного давления Р в деформацию мембраны линейно не во всем диапазоне, а только в небольшой его части: порядка 10%;
закон измерительного преобразования, реализуемый упругой деформацией, не является стабильным. Он зависит от температуры среды, в которой работает мембрана;
тензорезистор (или тензорезисторы) «крепится» к мембране и характеристики этой связи влияют на характеристику закона измерительного преобразования упругой деформации;
преобразование механического упругого изменения мембраны в сопротивление тензорезистора зависит не только от чувствительности ТР, но и от его температурной и временной стабильности;.
преобразование изменения сопротивления тензорезистора в неуравновешенном мосте постоянного тока, как было показано выше, сопровождается дополнительными погрешностями: от изменения напряжения питания, от нелинейности выходной зависимости.
3.1.3. Формирование выходного измерительного сигнала датчика давления.
На рис.3.5 показано, что выходной сигнал датчика давления формируется электронным блоком, на который поступает сигнал из измерительной диагонали неуравновешенного моста постоянного тока.
1) Электронный блок формирует выходной сигнал датчика как унифицированный, который может быть представлен сигналами напряжения или силы тока, частоты. Частотный сигнал используется достаточно редко.
Сигналы постоянного тока представляются в следующих унифицированных диапазо-
нах:
напряжение ─ в диапазоне 0…10В;
сила тока ─ в диапазонах 0…5мА, 0…20мА, 4…20мА.
Во многих проектах предпочтение отдается сигналу 4…20мА по той причине, что этот сигнал имеет «активный нуль» и обеспечивает дистанционное питание датчика.
9
3.1.4. Общий вид датчиков давления и характеристики
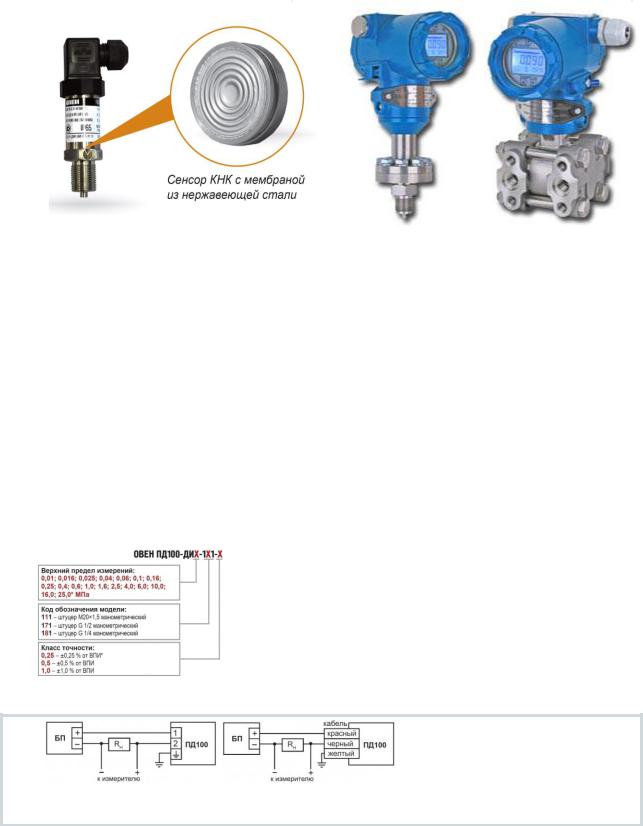
Общий вид датчиков давления и характеристики показаны ниже на примере общепромышленного датчика давления ПД100 фирмы ОВЕН, представленного на рис.3.10а.
В датчике измерительная мембрана выполнена из нержавеющей стали, сенсор выполнен на основе технологии «кремний на кристалле». В верхней части датчика показан кабельный ввод.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
б) |
|
|
|
|
|
|
Рис.3.10. Внешний вид датчиков давления
Верхний предел измеряемого давления (ВПИ) – от 10 кПа до 10 (25*) МПа. Перегрузочная способность – от 200% ВПИ и выше.
Предел основной погрешности измерения ─ ±1,0 % (от ВПИ); предел допустимой допол-нительной температурной погрешности измерения ─ ±0,3 % от ВПИ на каждые 10 °С; диапазон рабочих температур контролируемой и окружающей среды ─ от минус 40…+80 °С.
Выходной сигнал ─ 4...20 мА постоянного тока; сопротивление нагрузки─ 0…1200 Ом. Напряжение питания ─ 12…36 В (DC); потребляемая мощность ─ не более 0,8Вт. Устойчивость к механическим воздействиям по ГОСТ Р 52931-2008─ группа
исполнения V3. Степень защиты корпуса датчиков давления по ГОСТ 14254 ─ IP65. Среднее время наработки на отказ ─ не менее 100 000 ч. Средний срок службы 12 лет. Масса не более 0,2 кг. Штуцер порта давления M20х1,5.
Обозначение при заказе
Схема подключения датчика показана на рис.3.11:
Токовый сигнал 4…20мА

10
Рис.3.11. Схема подключения датчика с токовым сигналом 4…20мА
3.2. Датчики температуры контактные
Датчики температуры контактные чаще всего реализуются как: термоэлектрические, терморезисторные, манометрические и другие…. Контактные – это значит, что измерение температуры выполняется в процессе непосредственного контакта с объектом.
3.2.1. Термоэлектрические преобразователи
Термоэлектрические преобразователи создаются на основе термопар.
Термопары – это средства первичного измерительного преобразования температуры окружающей среды в сигнал напряжения постоянного тока. Термопары (ТП) применяются там, где необходимо измерять температуру в диапазоне от минус 250°С до плюс 2250°С.
1) Принцип работы ТП, напомним, основан на использовании термоэлектрического эффекта, сущность которого поясняется рисунком:
При соединении двух проводников (термоэлектродов) выполненных из разнородных ме-таллов (например, − медь и константан) образуются два контакта (спаи − J1 и J3). Третий контакт J2 − это спай однородного металла (медь/медь). Три спая формируют замкнутую электрическую цепь, в контур которой включен вольтметр V. Термоэлектрический эффект состоит в том, что если спаи разнородных металлов, т.е. J1 и J3, поддерживать при различной температуре, то в цепи будет протекать постоянный ток, образуемый электродвижущей силой, которая получила название термоЭДС. Спай J2 однородных металлов на возникновение термо-ЭДС не влияет.
Значение термо-ЭДС (Е), измеряемое вольтметром V, определяется выражением:
Е = α(Т1- Т3),
где α ─ коэффициент пропорциональности (коэффициент Зеебека).
В случае равенства температуры спаев J1 и J3 значение термо-ЭДС будет равно нулю. Если в соответствии с рис.3.12А спай 1 термопары медь–константан (М/К) погрузить в
сосуд с тающим льдом, а спай 2 поместить в измеряемую среду, то возникнет разность температур спаев, которая сформирует термо-ЭДС на входе вольтметра V. Спай 2, который погружается в контролируемую (исследуемую) среду, называют рабочим концом термопары (рабочим спаем), а спай 1, помещенный в термостат – свободным концом термопары
(холодным спаем).
Рис.3.12. Схемы измерения термо-ЭДС