

ЛЕК+ЛАБА(СУМ) / Лаб / 15ЭУИС-л2+
.pdf5. 2. УСТРОЙСТВА (ПРИБОРЫ) МИКРОПРОЦЕССОРНЫЕ
Многие десятилетия приборы проектировались только как техническое средство, алгоритм функционирования которого задавался исключительно на уровне «железа». В этом случае модернизация прибора в процессе промышленного производства всегда требовала либо переработки его конструкторской документации (КД), либо разработки новой КД на изменение «железа» и (или) технологии его производства. И то, и другое требовало значительных трудозатрат и материальных ресурсов.
Развитие нового направления в приборостроении в последние два десятилетия связано с тем, что прибор проектируется в виде совокупности технических и программных средств, т.е. в виде «железа», работа которого управляется программно. При этом в процессе производства прибора появляются возможности его функционального развития, «мягкого» усовершенствования путем доработки только программного обеспечения без «переработки» конструкторской («что делать») и технологической («как делать») документации на производство «железа» . При этом эти возможности будут тем большими, чем больше «железо» будет подстроено под программное управление.
Совершенствование прибора путем доработки его программного обеспечения реализуется быстрее, проще и дешевле переработки КД на «железо» и изменения технологии его производства. По этой причине проектирование приборов в виде совокупности программных и технических средств де-факто стало стандартом. Такой подход принципиально изменил приборостроение! При создании приборов стали все большое количество функции реализовывать программными средствами. Предельным в развитии этой тенденции является такое техническое решение прибора, в котором на уровне «железа» решаются только средства ввода и вывода сигналов, а все остальное, включая всю обработку входных сигналов, выполняется на уровне программных средств.
Развитие программно-технического направления в создании приборов основывается на успехах микропроцессорной технологии. Прибор, спроектированный на основе микропроцессорной технологии, далее будем называть прибором микропроцессорным (ПМ).
2.1. Обобщенная структура микропроцессорного прибора
2.1.1. Обобщенная структура ПМ
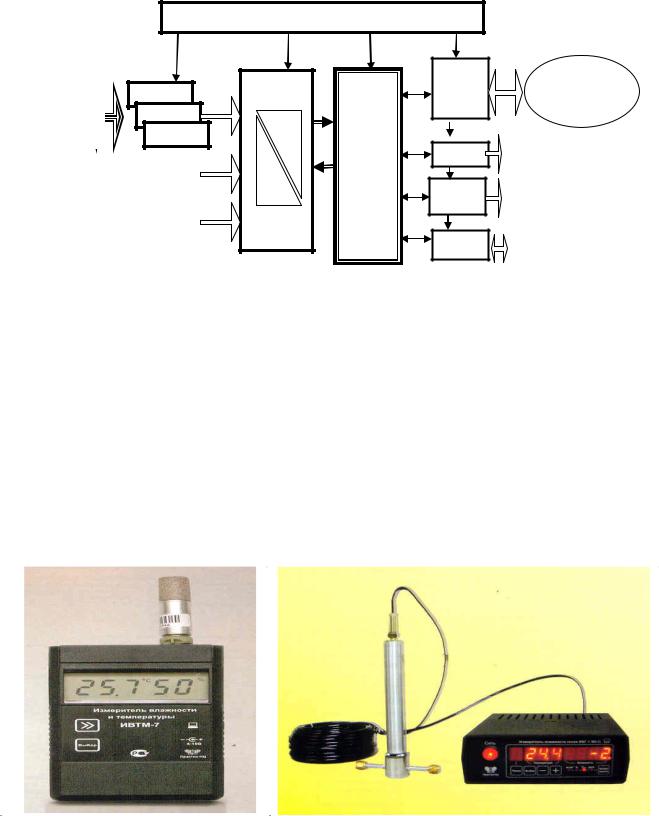
Общая структурная схема ПМ представлена на рис. 2.1, на котором приняты следующие обозначения структурных составляющих (СС):
БМК - блок микроконтроллерного управления работой прибора;
БИО - блок интерфейса оператора;
БП - блок питания;
ПИП - первичные измерительные преобразователи физической величины;
БОИС - блок обработки измерительных сигналов;
БСА - блок вывода аналогового сигнала для связи с внешними устройствами;
БСД - блок вывода дискретных сигналов для связи с внешними устройствами;
БПД - блок передачи данных.
Функциональное назначение каждой СС ПМ состоит в следующем.
1) БМК является ядром ПМ. С выбора технического решения этого блока начинается проектирование ПМ. Определяются: структурная организация прибора, распределение функций между техническими и программными средствами, способы задания режимов работы прибора и реализации алгоритмов его функционирования.
2) БИО реализует интерфейс взаимодействия оператора с прибором. В простейшем случае функции БИО ограничиваются выводом оператору только показаний прибора. В общем же случае БИО поддерживает интерактивное взаимодействие оператора с прибором,
2
обеспечивая настройку параметров прибора, выбор нужного режима его работы, чтения из ПМ хранящейся в нем информации и предоставления ее оператору в удобной для анализа форме.
|
|
БП |
|
|
БОИС |
БИО |
|
Типы |
ПИП |
||
|
|||
физических |
ПИП |
|
|
сигналов |
|
||
ПИП |
БМК |
||
|
|||
Сигналы электрического типа, |
БСА |
||
|
|||
аналоговые |
|
|
|
|
|
БСД |
|
Сигналы электрического типа, |
|
||
дискретные |
|
|
|
|
|
БПД |
|
|
Рис.2.1. |
Обобщенная структура ПМ |
|
Оператор
Сигналы выходные электрического типа, аналоговые Сигналы выходные
электрического типа, дискретные
Сигналы передачи данных
3)БП в приборе, как и в любом изделии, играет важнейшую роль, т.к. нормальное функционирование всех СС прибора возможно только при отсутствии проблем с их электропитанием.
4)ПИП осуществляют первичное измерительное преобразование сигналов какого-то типа в сигналы электрического типа.
В приборе, который выпускается предприятием как сборочная единица, ПИП конструктивно располагаются в корпусе ПМ (см., верхнюю часть ПМ на рис. 2.2а). В приборе, который производится предприятием в виде комплекса, ПИП конструктивно реализуются в виде выносной структурной составляющей, подсоединяемой к основной части прибора кабелем связи, входящем в комплект поставки прибора (см. рис. 2.2б). Выносное исполнение ПИП по рис.2.2б позволяет осуществлять его монтаж удаленно, размещая их в тех местах, где необходимо осуществлять «отбор ФВ» (в пределах длины соединительного кабеля).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) сборочная единица |
|
б) комплекс |
|
Рис.2.2. Конструктивные исполнения ПМ
3
5) БОИС предназначен для ввода сигналов электрического типа, для их первичной об-
работки и дальнейшего представления в виде, удобном для передачи в БМК.
В общем случае назначение БОИС состоит в выполнении следующих функций обработки входных аналоговых измерительных сигналов:
защиты от «разрушительного воздействия» недопустимого уровня входных сигналов или от нарушения полярности их подключения;
коммутации измерительных сигналов различных ФВ;
масштабирования измерительного сигнала;
фильтрации измерительного сигнала;
преобразования измерительного сигнала к виду, удобному для выполнения аналогоцифрового преобразования («токнапряжение», «частота-напряжение», «напряжение-часто- та», «длительность импульса– число импульсов», «сопротивление – напряжение» и т.д.);
аналого-цифрового преобразования (в некоторых случаях);
специальных функций обработки сигнала, определяемых особенностью работы ПИП конкретного назначения.
Проектирование БОИС выполняется с учетом специфики конкретного ПМ и может осуществляться как с использованием уже апробированных методик и технических решений, так и путем выполнения оригинальных разработок. Два треугольника, изображенные в БОИС, обозначают важную функцию блока – осуществление гальванического разделения входных цепей с микропроцессорной частью прибора (БМК). Смысл гальванической развязки будет рассмотрен далее.
6) БСА предназначен для передачи во внешнее удаленное устройство выходных аналоговых сигналов. БСА может формировать выходные аналоговые сигналы в виде частоты импульсов или гармонических колебаний, в виде прямоугольных импульсов переменной длительности (широтная импульсная модуляция), а чаще всего в виде напряжения или силы постоянного тока. Сигналы частоты, силы тока или напряжения формируются в унифицированных диапазонах изменения. Они могут использоваться как для целей управления – для формирования аналоговых управляющих воздействий, для задания уставок регуляторам, а также для дистанционной передачи информации на индикатор или в устройство учета.
7) БСД предназначен для передачи в удаленное внешнее исполнительное устройство дискретных сигналов. БСД может формировать выходные сигналы в виде единичных импульсов фиксированной длительности (число-импульсная последовательность) или ступенчатого изменения сигнала для передачи команд двухпозиционного управления: открытьзакрыть, увеличить -стоп, уменьшить -стоп и т.п.
8) БПД предназначен для обеспечения взаимодействия с внешним программным устройством, в том числе, – с удаленным компьютером (ЭВМ), путем бит-последовательного приема-передачи цифрового сигнала. Такое взаимодействие необходимо с одной стороны – для чтения из ПМ результатов измерений, архивной и служебной информации, а с другой – для записи в ПМ служебной информации, для синхронизации запуска в ПМ измерительных операций при его работе в составе системы. Наличие в приборе БПД отвечает требованиям обеспечения возможности сетевого использования прибора.
Особенности проектирования БМК, БП, БИО будут рассмотрены в данной лекции; вопросы проектирования других структурных составляющих ПМ будут рассмотрены в следующих лекциях.
2.2. Блок микроконтроллерного управления
Требования к БМК определяются составом функций ПМ, необходимой точностью вычислений результатов измерений и их обработки, необходимым быстродействием, ограничениями электропотребления и габаритов.
4
2.2.1. Функции БМК
В общем случае БМК реализует алгоритм работы прибора, выполняя следующие
функции:
прямых или косвенных измерений ФВ по заданным программам измерительных преобразований;
математической обработки результатов измерений, включая внесения поправок в результаты измерений в том числе с учетом функций влияния внешних факторов;
контроля результатов измерений ФВ относительно заданных уставок минимального
имаксимального значений их рабочего диапазона, а также относительно допустимой скорости изменения ФВ во времени;
форматирования результатов измерений (обозначение измеренной ФВ, указание времени измерения, указания признака достоверности результата измерения) с целью размещения их в архивной памяти ПМ и архивное хранение данных;
выполнения измерений по заданной временной программе или по заданным событиям (например, - выход одной из измеряемых ФВ за заданное значение уставки, нарушение электроснабжения и т. д.);
периодической «самокалибровки» для контроля соответствия ПМ установленным метрологическим характеристикам;
поддержания алгоритма интерактивного взаимодействия «оператор-прибор»;
управления внешними устройствами по аналоговым и дискретным каналам;
формирования пакетов данных для передачи в удаленные устройства, в том числе в
ЭВМ;
контроля и регистрации несоответствия условий эксплуатации прибора (температура, влажность, качество электроснабжения, уровень тряски и т.п.) требованиям ТУ, а также факты несанкционированного доступа в прибор, как СИ (т.е. фиксирования фактов и времени нарушения пломб, устанавливаемых при выпуске приборе, при поверке или калибровке).
2.2.2. Выбор микроконтроллера для решения задач БМК.
Основой структурного решения любого БМК является микроконтроллер (МК).
Под микроконтроллером понимается микросхема высокого уровня интеграции, кото-
рая:
реализует функции микропроцессора (т.е. устройства, выполняющего вычислительные операции),
содержит в своем составе запоминающее устройство,
поддерживает выполнение функций ввода-вывода сигналов.
По сути, МК – это однокристальный компьютер (ранее он так и назывался – микроЭВМ). Использование одной микросхемы МК (т.е. одного кристалла), вместо функционального набора микросхем: процессора, памяти различных типов и периферии ввода-вывода сигналов минимизирует размеры БМК, электропотребление и стоимость прибора.
В общем случае, как будет показано далее, БМК может быть реализован с использованием не одного, а нескольких МК, решающих свои задачи, но работающих во взаимодействии друг с другом.
Выбор МК для решения в ПМ конкретного состава задач осуществляется на основе анализа следующих его характеристик:
тактовая частота;
разрядность шин;
состав и количество каналов ввода-вывода;
энергопотребление.
1)Под тактовой частотой (МГц) понимается частота задающего генератора, стабилизированного с помощью кварцевого элемента. Генератор подключается к МК для тактирования его работы при выполнении операций: адресации к памяти, «чтения» и «записи»

5
данных, вычисления или логических преобразований и т.д. Понятно, что чем выше тактовая частота, т.е. чем меньше время, которое МК затрачивает на выполнение одного такта операций вычисления и управления вводом-выводом, тем выше быстродействие и БМК, и ПМ.
2)Под разрядностью МК понимается число одновременно обрабатываемых двоичных разрядов: 4, 8, 16, 32, 64. Понятно, что процессоры с большей разрядностью имеют большую вычислительную возможность. Но каждому ПМ нужен свой вычислительный уровень. Здесь нет понятия «чем больше, тем лучше».
3)Состав каналов ввода-вывода определяет количество вводов и выводов аналоговых
идискретных сигналов, а также количество каналов бит-последовательной передачи данных. Количество каналов определяет потенциальный количество функций ввода-вывода, которые может поддерживать МК.
4)Энергопотребление определяет энергоэкономичность создаваемого прибора и формирует требования к организации его питания. Энергоснабжение должно анализироваться для различных режимов работы МК: для рабочего режима, для ждущего режима, для режима «сна». Понятно, что чем меньше ПМ потребляет электроэнергии при сохранении предъявляемых к нему технических требований, тем лучше: тем меньше он вырабатывает тепла, тем больше возможности для его питания от автономного источника.
В настоящее время на рынках микроэлектроники имеется очень большое разнообразие типов МК. В данной лекции из всего множества МК рассмотрим только характеристики семейства MSP430. Это семейство, обладая высокими техническими характеристиками, имеет существенное преимущество над другими в части экономии энергопотребления. Экономичность потребления делает MSP430 весьма перспективным для применения в приборах разного назначения: в счётчиках количества тепловой энергии, в счетчиках и расходомерах газа
ижидкости, в измерителях и регуляторах различных физических величин, в портативных медицинских измерительных приборах и т.д.
2.2.3. Характеристики микроконтроллеров семейства MSP430.
Микроконтроллеры семейства MSP430 выпускаются фирмой Texas Instruments (www.ti.com), являющейся одним из мировых лидеров по производству цифровых сигналь-
ных процессоров..
Микроконтроллеры семейства MSP430 имеют одинаковое 16-разрядное процессорное ядро и отличаются друг от друга объемом встроенной памяти программ и данных, набором периферийных устройств, количеством внешних выводов.
Внешний вид одного из микроконтроллеров семейства MSP430 представлен ниже, практически в натуральную величину:
Основными чертами рассматриваемых микроконтроллеров являются широкий набор встроенных периферийных устройств, высокая производительность процессора и крайне низкое электропотребление, что делает их идеальными для применения в портативных измерительных индустриальных и биомедицинских приборах.
2.2.3.1. Структурная схема MSP430.
Структурная схема MSP430., представлена на рис.2.3.
Основой микроконтроллера является 16-разрядный процессор со структурой связей, определяемой как RISC-архитектура: Reduced Instruction Set Computer. Такой процессор обозначается как RISC-CPU.
Отличительная особенность RISC-CPU состоит в том, что процессор обращается к аккумуляторным (накопительным) регистрам, к памяти и к периферийным устройствам (портам ввода-вывода) процессорной командой, которая выполняется в течение одного такта, в то
6
время как в МК других типов такие обращения выполняют одной процессорной командой,
но за несколько процессорных тактов.
Рис. 2.3. Структурная схема микроконтроллера MSP430
Из рис.2.3 видно, что однотактное исполнение команд процессора CPU обеспечивается тем, что RISC-CPU поддерживает единое адресное пространство с возможностью непосредственного обращения через общую адресную шину (MAB) и шину памяти данных (MDB) к Flash-ПЗУ, к оперативной памяти ОЗУ, к сторожевому таймеру и к периферийным модулям ввода-вывода. Однотактная работа RISC-СPU существенно повышает эффективность реализации различных алгоритмов обработки данных.
Длительность такта RISC-CPU определяется кварцевой частотой генератора тактовой частоты в блоке «система тактирования» или ее масштабированием при формировании тактирующего сигнала (с использованием 8 базовых генераторов).
Всистеме команд процессора MSP нет команд, производящих умножение и деление. Однако в старших моделях имеется периферийное устройство, с помощью которого можно производить 8-ми и 16-ти разрядные операции умножения. Наличие быстрого аппаратного умножителя с возможностью накопления результата диктуется активным использованием MSP микроконтроллеров для цифровой обработки сигналов в реальном времени (например, - для реализации цифровых фильтров).
Flash и RAM могут использоваться как для программного кода, реализующего алгоритмы работы прибора, так и для данных – для регистрации результатов контроля и измерения. Байты или слова таблиц данных могут сохраняться и использоваться непосредственно в Flash, что исключает необходимость копировать эти таблицы в ОЗУ перед дальнейшим использованием. Во Flash памяти верхние 16 слов адресного пространства занимает таблица прерываний. Обращение к прерыванию позволяет немедленно инициировать выполнение программы, реализующий алгоритм действий по определенному событию.
Сторожевой таймер (WDT WatchDog-timer) − предназначен для контроля нормального исполнения программ. Он срабатывает по фактам «зависания» программы и формирует программное прерывание, которое инициирует продолжение работы БМК.
ВMSP микроконтроллерах 16-ти битный сторожевой таймер может работать собственно в режиме или в режиме интервального таймера.
Сторожевой таймер, как правило, организуется в виде свободно бегущего таймерасчетчика, который сбрасывается через определенное время. В том случае, если происходит
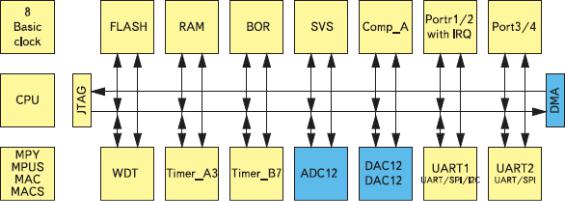
7
сбой исполнения программы, то счетчик своевременно не сбрасывается в нуль, происходит его переполнение, которое формирует аппаратный сброс микроконтроллера.
В режиме интервального таймера аппаратный сброс при переполнении не производится. Вместо этого генерируется прерывание (с адресом вектора FFF4h).
2.2.3.2. Функциональная схема MSP430
Функциональная схема MSP430 представлена на рис.2.4 с указанием периферийных модулей: супервизор питания BOR; порты параллельной передачи сигналов (port); та-ймеры (А,В); аналоговый компаратор(Соmp-A); аналого-цифровой преобразователь (ADC); цифроаналоговый преобразователь(DAC); порты последовательной передачи данных (UART).
Рис. 2.4. Функциональная схема одного из МК из семейства MSP430
1) BOR – супервизор питания предназначен для защиты МК от сбоев, которые возникают при коротких «пропаданиях» напряжения питания. Например: после «сбоя» питания процессор и память могут с разным временем восстанавливать свою работу. Если процессор начнет работать раньше, то из памяти он будет считывать ложную информацию. А это приведет к «зависанию» программы.
2) Порты ввода-вывода (Port)- параллельного ввода и вывода сигналов. В MSP430 различного исполнения количество таких портов может быть от 1 до 6 (Р1,…,Р6). Каждый порт – это 8 дискретных каналов. Каждый канал любого порта индивидуально конфигурируется либо на ввод, либо на вывод дискретного сигнала.
Каналы портов P1 и P2 способны работать как выводы внешних прерываний (IRQ). Это значит, что при появлении на входе какого-либо канала Р1 или Р2 сигнала логической «1» последуют два действия: будет остановлена работа исполняемой программы и запомнены все промежуточные результаты; будет инициировано обращение к определенной подпрограмме, предназначенной для обработки события, факт которого сигнализируется сигналом прерывания.
Как правило, событиями, которые могут вызывать прерывание, могут быть:
наступление времени выполнения какого-то действия (например, - периодическая проверка работоспособности оборудования);
возникновение аварийного состояния среды (например, - аварийная загазованность помещения);
возникновение аварийного состояния оборудования (например,- аварийный останов насоса городского водоснабжения, срабатывание охранной сигнализации);
выход значения контролируемой физической величины за заданные границы ее допустимого изменения (например, - снижение давления газа в трубопроводе ниже допустимого значения или превышение допустимой скорости изменения температуры среды).
Отметим особенность обработки прерываний: сигналы от каналов каждого порта сгру-
ппированы в один общий вектор: для порта P1 вектор прерывания с адресом Flash памяти– FFE8h, а для порта P2 – с адресом FFE2h. Поэтому в подпрограмме обработки прерывания
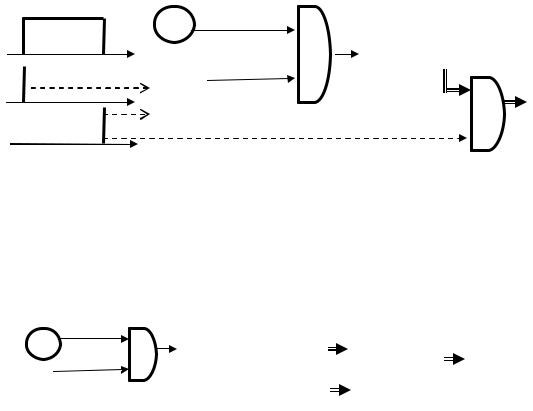
8
после активизации вектора прерывания дополнительно должны анализироваться флаги прерывания, т.е. должен быть установлен тот канал, на входе которого имело место изменения дискретного входного сигнала. Запрос прерывания от каждого канала портов Р1 и Р2 может быть индивидуально «разрешен» или «запрещен», а также может быть индивидуально сконфигурирован на инициирование прерывания по «переднему» или «заднему» фронту входного сигнала, т.е. по переходу из состояния логического «0» в состояние логической «1» или наоборот.
3) Таймеры А3 и В7 − это два 16-ти битных счетчика, на входы которых поступают импульсные последовательности образцовой частоты. Таймер А3 обеспечивает работу с тремя модулями захвата/сравнения, а таймер В7 − с семью модулями захвата/сравнения.
Модули захвата обычно используются для точного измерения временных интервалов
между какими-либо событиями, например фронтами внешних импульсов, периодов импульсных последовательностей, частоты периодических колебаний,
Для организации работы модуля захвата обычно запускают таймер в режиме свободного счета, а входная логика модуля настраивается на определенный тип события (растущий/падающий фронт). При возникновении внешнего события, текущее содержимое тай-
мера автоматически перезаписывается в один из регистров захвата.
|
F |
|
|
Счетчик |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
таймера |
|
|
|
Тг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Запуск |
|
Разрешить |
|
|
|
Регистр |
|
|
|
|
|
|
||
|
Сброс |
|
|
|
|
|
захвата |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модули сравнения обычно используются для генерации событий на внешних выводах
микроконтроллера в заданный момент времени. Для этого блок выходной логики, связанный с внешним выводом, настраивают на тот или иной тип события (установка, сброс или переключение вывода). В специальный регистр записывается сравниваемое значение, соответствующее моменту генерации события. С помощью цифрового компаратора модуль периодически сравнивает текущее содержимое таймера и регистра сравниваемого значения. При их равенстве вырабатывается сигнал EQU, который заставляет сработать блок выходной логики.
F |
|
Счетчик таймера |
|
|
|
|
|
|
Компаратор |
|
|
||
|
|
|
|
|
EQU |
|
|
|
|
|
цифровой |
|
|
Разрешить |
|
|
|
|
|
|
|
|
|
|
|
||
Регистр сравниваемого |
|
|
|
|
||
|
значения |
|
|
|
|
|
|
|
|
|
|
|
|
Например, таким образом, могут формироваться сигналы управления входным коммутатором аналоговых сигналов или задаваться последовательность включения гирлянд на новогодней елке.
Таймер B7 имеет следующие отличия от таймера A3:
разрядность таймера может быть программно задана как 8, 10, 12 или 16 разрядов;
включает в себя 7 модулей захвата/сравнения (т.е. одновременно может осуществляться временное управление 7 событиями или процессами).
Дополнительные возможности таймера B7 дают удобные средства построения на его базе многоканальных широтно-импульсных (ШИМ) генераторов. С помощью одного регистра модуля сравнения может задаваться несущая частота модуляции, а содержимое другого регистра определяет длительность генерируемых импульсов. Изменяя содержимое регистров

9
можно динамически управлять изменением ширины импульсов в различных каналах.
4) Comp_A – это аналоговый компаратор: устройство, которое позволяет сравнивать уровень аналогового сигнала на входе с некоторым опорным уровнем, например, относительно напряжения Vо (1,5В или 2,5В) источника опорного (эталонного) напряжения. При превышении входным сигналом уровня опорного напряжения происходит «срабатывание» компаратора и формирование запроса сигнала прерывания. Выходной сигнал компаратора можно вывести на внешний вывод микроконтроллера или использовать в качестве входа для модуля захвата/сравнения таймера А или В.
Понятно, что компаратор будет тем лучше, чем чувствительнее он будет к разности уровней входного и опорного напряжений.
Одно из назначений компаратора состоит в том, что если на опорном входе установить контрольное напряжение допустимого изменения определенных физических величин, на другой вход подавать аналоговый сигнал, характеризующий значение одной величины или через коммутатор - ряда величин, то самого измерения выполнять не нужно. Необходимая информация будет передаваться выходным дискретным сигналом Comp_A.
5) ADC − аналого-цифровой преобразователь, который осуществляет преобразование входной аналоговой величины в цифровой код, обладает следующими техническими характеристиками:
разрядность результирующего кода – 12 или 10 бит нормального двоичного кода;
скорость преобразования – 200 000 операций/с (обеспечивает временную дискретизацию входного сигнала с временным шагом 5 мкс);
встроенное устройство выборки/хранения;
преобразование инициируется программным обеспечением или аппаратно от таймеров A или B;
встроенный генератор опорного напряжения 1.5 или 2.5 V;
буферная память преобразования и управления, позволяющая сохранить до 16 последовательных измерений;
восемь индивидуально конфигурируемых внешних входных каналов.
В модуле имеется датчик температуры, который позволяет учитывать влияние изменения температуры окружающей среды на погрешность аналого-цифрового преобразования.
6) DAC − цифро-аналоговый преобразователь, 12-ти разрядный. DAC осуществляет преобразование входного кодового значения в выходной аналоговый сигнал напряжения постоянного тока.
7)UART- интерфейс определяет протокол бит-последовательной передачи данных, как
вуниверсальном протоколе асинхронной передачи сигнала согласно популярным интерфейсам RS232 и RS485, так и во внутриприборных протоколах SPI и I2C, которые будут рассмотрены ниже.
В UART подключение к МК внешнего устройства может осуществляться через один или два порта. Каждый порт имеет: URxD – вход приемника (R-receiver data), UTxD – выход передатчика (T- transmitter data) и общий провод.
В режиме последовательной передачи цифрового сигнала обеспечиваются следующие характеристики:
бит-последовательная передача осуществляется кадрами длинной 7 или 8 бит с контролем или без контроля четности. Каждый кадр обрамляется стартовым битом, передаваемом всегда низким уровнем, и одним или двумя стоповыми битами, передаваемыми всегда высоким уровнем:

10
обеспечивается возможность программного задания скорости передачи путем формирования внутреннего (для RS232, RS485) или внешнего (приборные интерфейсы) тактирования;
прием и передача осуществляются через независимые сдвиговые регистры;
приемник и передатчик имеют независимые вектора прерывания.
для передаваемых и принимаемых данных имеются независимые буферные регистры.
2.2.3.3.Краткие технические характеристики некоторых исполнений MSP430.
Краткие технические характеристики некоторых исполнений МК из семейства
MSP430 показаны в табл. 2.1
Таблица 2.1
.
Ранее отмечалось, что семейство MSP430 характеризуются низким потребленим электроэнергии. Так для сохранения содержимого ОЗУ необходим ток не более 0,1 мкА, а ток при максимальной производительности CPU не превышает 250 мкА. Низкое энергопотребление обеспечивает возможность длительной работы прибора при питании от автономного источника: батареи или аккумулятора.
В семействе MSP430 есть исполнение MSP430C1101: 1кБ ПЗУ, 128 байт ОЗУ, сторожевой таймер, многофункциональный 16-разрядный таймер и аналоговый компаратор, которое на 100% совместимо с другими исполнениями МК семейства. MSP430C1101− это (на 2010г.) МК с самым минимальным потреблением электроэнергии. По сравнению другими он обеспечивает до 10 раз большую экономию электроэнергии: в активном режиме (на 4 кГц) потребление составляет 1,3 микроампера, а в режиме ожидания потребление составляет всего 0,7 мкА. Если в среднем за сутки потребляемый ток принять равным 1мкА, то годовой расход энергии составит порядка 10мА*час. Стоимость MSP430C1101 при больших объемах поставок всего $0,49. Под такой МК может быть подобран аккумулятор для питания прибора в течение всего нормативного срока его эксплуатации. А это важно при создании систем различного назначения.