

shpory GOS111
.pdf1.Уравнение движения электропривода
Движение электропривода определяется действием двух моментов: момента, развиваемого двигателем и момента сопротивления. Различают Реактивный Мс (появляется вследствие движения – противодействующая реакция механич-го звена на движение) и Активный(создается посторонними источниками механической энергии).
F=ma Fд-Fс=mdυ/dt-З Ньютона для поступ.дв Mд-Mс=Jdω/dt – основное ур-е привода
J – момент инерции
1)Mд> Mс, Mдин>0 – разгон ЭП
2)Mд< Mс, Mдин<0 – торможение ЭП
3)Mд= Mс, Mдин=0 – установившееся движение
2. Механические характеристики производственных механизмов
Mс=f(ω) Аналитического расчета этих хар-к нет. С помощью эмпирической формулы
Mс=Мо+(Мсн-Мо)(ω/ωн)q
Можно рассчитать и приближенно построить хар-и для наиболее распр-ых произв-х механизмов.
Мо – момент статич.сопрот. при хол. ходе Мсн – при номинальной скорости ω – ω текущая, ωн – ω номинальная
1)q=0, Mс=const
2) q=2, Mс=kω2≡ ω2
Вентиляторная хар-ка, компрессоры, ЦБН, грибной винт парохода
3) q=-2, Mс=1/(kω2)≡ 1/ω2
Такую хар-ку имеют металлорежущие станки вращ-го движения– токарные,фрезерные, расточ-е. Эта х-ка получается при постоянстве мощности.
Аналитическое выражение Mд=f(ω) Рассмотрим хар-ки ЭД по степени их жесткости К-т жесткости β=∆M/∆ω=∂M/∂ω
β=(M1-М2)/(ω1- ω2)=ctgα
Хар-ка || оси ох считается абсолютно жесткая. В ЭП наиболее желательной является наиболее жесткая хар-ка, обеспеч-я более стабильную скорость при различных колебаниях момента. Хар-ка || оси оу – абсолютно мягкая хар-ка.
1)абсолютно жесткая.Такая х-ка у синхронного Д 2)жесткая-имеет ДПТНВ при питании обмотки якоря от источника напряжения 3)ав рабочий участок х-ки считается жестким.Это х-ка АД с
короткозамкнутым ротором.
4)рабоч. участок ав считается мягкой х-ой. Такую х-ку имеет ДПТПВ 5)абсолютно мягкая хар-ка. Имеет ДПТНВ, но при питании
обмотки якоря от источника тока большой мощности, момент двигателя Мд=Iя*kф, где k – обмоточный к-т, ф – поток.
3.Механические характеристики ДПТНВ
Двигатель вращается, создается Евращ навстречу приложенному напряжению
1)Uя=IяRя+Евращ – уравнение равновесия Евращ=kфω=сω, где k – обмоточный к-т, ф – поток.
k=(p*N)/(2πa), где p – число пар полюсов, N – число полюсов, a – число витков Если в уравнение 1 Евращ выразим через сω и разрешим это
уравнение отн-но ω
2)ω=(U-IR)/c=(U/c)-(IR/c) I=f(ω) – уравнение скоростной характеристики
Если в 2) I выразим через Мд=I*kф= Iс, то
3)ω=(U/c)-(MR/c2)= ωo+∆ω M= f(ω) – ур-е механич. хар-ки двигателя В ур-ии 2 и 3 переменные параметры находятся в 1 степени
значит хар-ки будут линейными.Наклон хар-ки определяется R якоря, поэтому каждый конкретный двигатель с его Rя имеет единственную хар-ку, называемую естественной. Все остальные хар-ки при изменении парам-ов ур-ий 2 и 3 будут искусственными.
В ур-ях 2 и 3 1 член – скорость идеального х.х., 2 – просадка скорости.
Из анализа 2 и 3 следует, что:
1)при введении добавочного Rд в цепь якоря хар-ки будут мягче естественной
ω=(U/c)-(M(Rя+Rд)/c2)
2)при ослаблении потока ниже номинального хар-ки проходят
выше естественной, сходясь в точке короткого замыкания (скоростные хар-ки) Точка опрокидования регулирования
3)при уменьшении U ниже Uном харки проходят ниже основной и // ей
Основной хар-ка соответствует Uном Тормозные режимы
1)Генераторный – осуществляется разгоном двигателя внешним источником вращения выше скорости ωo
U=IR+E Mд=CI E=Cω
2)торможение против включения А)сменой полярности обмотки якоря и введением
ограничивающего Rд. Ограничение необходимо во избежание возникновения кругового огня
Б)введен Rд такой величины, когда выполняется Мкз<Мн (А1) 3) режим динамического торм-я осущ-ся откл.обмотки якоря от сети и замыканием ее на ограничивающее Rд. Обмотка возбуждения не откл. В этом случае тормозной М возникает за счет тока динамического торможения, протекающего под действием ЭДС вращения, сохраняю-щейся за счет вращения по инерции якоря.
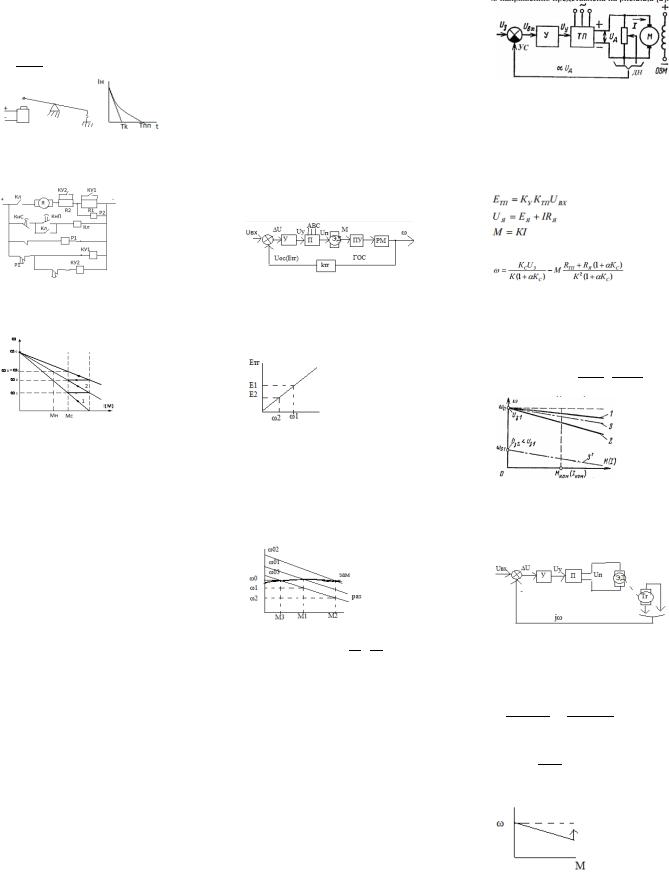
4.Механические характеристики ДПТПВ
Uc=I*Rц+Евр (1)
Rц=Rя+Rов Евр=Сω
ω=( Uc- I*Rц)/С – ур-е скоростной хар-ки
Отличие от ДПТНВ: Iя=Iвозб, то при больших колебаниях нагрузки Iвозб колеблется в тех же пределах, а изменение тока возбуждения в больших пределах сопровождается изменением магнитного потока, создаваемого Iвозб по нелинейной зависимости, называемой кривая намагничивания. Из-за насыщения стали с ростом I вырождается в ДПТНВ.
В связи с нелинейной зависимостью потока от тока насыщения механическая хар-ка двигателя так же будет нелинейной.
рис.1 Аналитического расчета этой хаки нет, но в каталогах эти двигатели приводятся на каждый отрезок серии универсальные зависимости M=f(Iв), ω=f(Iв) строятся в относительных единицах (параметр, разделенный на его номинальное значение)
Из анализа рис.1 следует, что с М→0 ω→∞. Следовательно, этот двигатель нельзя оставлять без нагрузки, он пойдет в разнос.
1)При введении Rдоб в цепь якоря хар-ки проходят мягче естественной 2)при ослаблении Ф хар-ки проходят выше естественной, сходясь в точке
короткого замыкания. Ослабление потока достигается шунтированием обмотки возбуждения.
3)При ↓ Uс характеристики проходят ниже основной хар-ки и // ей Тормозные режимы
1)Генераторный режим отсутствует, т.к. у этого двигателя хар-ка не пересекает ось оу, т.е. ЭДС вращения никогда не превзойдет приложенное U
2)режим торможения против включения А)смена полярности обмотки якоря
Б)введение ограничивающего сопротивления
В)динамическое
В тормозных режимах, сопровождающихся сменой направления тока во избежание размагничивания магнитопровода двигателя на период торможения начало и конец обмотки возбуждения меняется на противоположный, тогда направление тока возбуждения в обмотке не изменится.

5. Механические характеристики асинхронного двигателя с фазным ротором
Схема замещения
- ток ротора, приведенный к току статора
- скольжение двигателя Для определения механической характеристики сравним потери в роторе
Момент критический Мкр определим взяв производную
Из анализа уравнения следует:
1. Момент двигателя весьма чувствителен к колебаниям U сети, что следует учитывать при эксплуатации двигателя 2.Момент критический не зависит от величины активного сопротивления ротора , т.е. при введении добавочных сопротивлений в цепь ротора, характеристики будут проходить мягче естественной,а Мкр останется постоянным
Тормозные режимы 1.Генераторный осуществляется разгоном двигателя внешним
источником вращения выше синхронной скорости , при этом активная Е преобразуется и поступает в сеть, а реактивная идет на создание контура намагничивания 2.Торможение против включения А)сменой чередования двух любых фаз
Тормозной момент в этом случае возникает за счет разных направлений вращения магнитного поля с одной стороны, мгновенно изменившего направление вращения после смены чередования фаз, и ротора, вращающегося по инерции в прежнем направлении.
Б.введенеием Rд такой величины, когда Мкз (пусковой момент) меньше Мн
3.динамическое торможение осуществляется отключением обмотки статора от цепи переменного тока и
подключением и подключением двух любых фаз сети постоянного тока.При этом возникает тормозной момент за счет взаимодействия постоянного магнитного потока, протекающего по обмотке статора от действия постоянного тока, протекающего в стержнях ротора, вращающегося по инерции.
Мкдт отличается от двигательного Мкр
Iэк – эквивалентный ток, удобный для расчета характеристики динамического торможения.
6.Выбор мощности Д методами эквива-х величин в длительном режиме с переменной нагрузкой, в повторно- кратковр-ом режиме
Продолжительный режим – за время приложения нагрузки двигатель нагревается до установившегося теплового состояния (
1 имеем нагрузочную диаграмму мощности, снятую экспериментально с опытного образца
В этом случае наиболее точным будет метод выбора мощности по допустимому перегреву за цикл tц<=tдоп. Tдоп определяется классом изоляции данного двигателя. Однако, этот метод ограничен необходимостью иметь опытный образец, с которого мы предварительно снимаем
нагрузочную диаграмму, а также длительное время испытания данного образца.
2 чаще используется метод средних потерь
 Если в течение цикла на отдельных этапах времени скорость двигателя будет значительно различаться, в этом случае следует учитывать ухудшение охлаждения. Оно определяетмся коэффициентом ухудшения
Если в течение цикла на отдельных этапах времени скорость двигателя будет значительно различаться, в этом случае следует учитывать ухудшение охлаждения. Оно определяетмся коэффициентом ухудшения
-коэффициент ухудшения охлаждения при полной остановке Д, приводится в литературе.
3)метод эквивалентного тока
П- вентиляционные, механические, потери в стали
Допущение П-const, R-const
метод е используется, если имеется нагрузочная диаграмма тока, предварительно снятая с опытного образца (не удобно) чаще пользуются 4)метод эквивалентного момента
C-const
5) метод эквивалентной мощности (расчетный)
ω-const
Повторно-кратковременный режим – за время подключения нагрузки двигатель не успевает нагреться до установившегося состояния, а за период отключения не успевает охладиться до температуры окружающей среды.
Нагрузочная диаграмма шахтного подъемника
Сначала спуск, потом подъем. Приводим к стандартному режиму
Если реальный ПВ (период включения) отличается от ПВ ст, то можно воспользоваться
7.Разомкнутые САУ. Упр-е в функции скорости
Разомкнутые САУ выполняют следующие функции: ступенчатый пуск; торможение; реверс, а также дискретное регулирование скорости в небольшом диапазоне. Они строятся на базе релейноконтакторной аппаратуры. Эти САУ создаются в зависимости от изменения скорости, тока и времени.
САУ функции скорости как правило строятся функцией косвенного изменения скорости в зависимости от ЭДС двигателя
. Функции непосредственного измерения скорости либо тахогенераторов схемы получаются дороже и менее надежными, чем функции косвенного измерения скорости.
Кл,КУ2,КУ1 – нормально разомкнутые контакты, КнП и КнС – с выдержкой времени при замыкании/размыкании Контакторы – это аппараты, предназначенные для коммутации
силовых цепей, но у них возможны дополнительные контакты для коммутации в цепях управления. Т.к. он предназначен для коммутации силовых цепей, имеющих большие токи, то при размыкании появляется дуга, для ее гашения контактор снабжен дугогасительной камерой.
Реле предназначено для коммутации слаботочных цепей и не имеет дугогасительной камеры, за исключением реле тока, включаемого непосредственно в силовую цепь.
КУ1 – контактор ускорения 1 ступени, Кл – контактор линейный, КнП и КнС – кнопки Пуск и Стоп.
Работа схемы
При нажатии КнП получает питание Кл по цепи «+»-КнС-КнП- Кл-«-». Кл, получив питание, своими контактами подключает двигатель к сети и вторым контактом шунтирует КнП. Двигатель, получив питание, разгоняется по характеристике 1, достигнув скорости ω1, его ЭДС Е1=сω1, а эта Е1=Uку1 – напряжение срабатывания контактора ускорения 1 ступени. Т.о. КУ1 замкнуло контакт и зашунтировало R1.
Разгон продолжается по характеристике 2. Достигнув ω2: Е2=сω2 =Uку2. КУ2 включив питание шунтирует R2. Двигатель выходит на естественную характеристику.
Недостатком является наличие контакторов с разными напряжениями срабатывания. Устранить этот недостаток можно, используя схему со штрихами и соединение 1-2 убрать. В этом случае контакторы будут срабатывать при сумме напряжений
Е1=с ω1+I(Rя+R2)= Uку1 Е2=с ω2+IRя= Uку2
с ω1< с ω2; I(Rя+R2)> IRя
Uку1≈ Uку2
Основным недостатком схем функции скорости является возможность перегорания пусковых сопротивлений в случае возможного повышения напряжения в сети в момент пуска.
8. Разомкнутые САУ. Упр-е в функции тока
Схема автоматического пуска, построенная на принципе управления в функции тока, должна предусматривать одно или несколько реле, включаемых непосредственно в цепь якоря двигателя. Количество реле зависит от числа пусковых ступеней резисторов. Построение схем управления в функции тока понятно из рис, где показано применение токового реле углового ускорения РУ с размыкающим контактом. При включении Линейного контактора КЛ получает питание катушка токового реле РУ и его размыкающий контакт в цепи контактора углового ускорения КУ в начале пуска размыкается. Поэтому пуск двигателя начинается с полностью введенным резистором в цепи якоря; контакт блокировочного реле РБ не позволяет контактору КУ включиться сразу после включения контактора КЛ, так как собственное время включения реле РБ выбирается большим или равным собственному времени включения реле РУ.
Ток отпускания реле ускорения равен току переключения I2, что приводит к срабатыванию контактора КУ и шунтированию пускового резистора. При втором броске тока контактор КУ не отключается вследствие того, что контакт реле РУ шунтирован теперь контактом КУ.
Достоинство: переключения производятся при заданных значениях тока в цепи якоря и не зависят от колебаний напряжения сети.
Недостатки: если при пуске двигателя нагрузочный момент на его валу по к-либо причинам окажется выше расчетного, то ток может длительное время превышать значение I2, при котором происходит отпускание якоря реле. Поэтому пусковой резистор окажется невыключенным, что может привести к его перегорания, так как он не рассчитан на длительную работу.
9. Разомкнутые САУ. Управление в функции тока времени.
С целью предотвращения сгорания пусковых сопротивлений в случае возможного повышения напряжения в сети в момент пуска, чаще используются схемы, работающие функцией времени. В этих схемах используются реле следующих типов: 1)с заворачивающейся катушкой после ее отключения. В этом случае ток спадает по зависимости
2)реле с медной гильзой, которая надевается на сердечник магнитопровода, в которой наводятся вихревые токи за счет протекания магнитного потока по сердечнику. При отключении катушки магнитный поток в сердечнике спадает, а вихревые токи гильзы препятствуют спаданию магнитного потока, обеспечивая т.о. выдержку времени
В исходном состоянии при подаче напряжения на схему получает питание реле Р1 (с медной гильзой) по цепи «+»-Кл-Р1-«-». Р1, получив питание, разрывает свой временной контакт в цепи контактора КУ1. При нажатии КнП получает питание Кл. Кл своими контактами; в силовой цепи подключает двигатель к сети; разрывает цепь питания Р1; шунтирует КнП.
Двигатель, получив питание, разгоняется по характеристике 1. Одновременно в двигателе получает питание реле Р2, котрое своим контактом разрывает цепь питания КУ2. Р1, потеряв питание, с выдержкой во времени, замыкает свой контакт в цепи КУ1. КУ1, получив питание своими контактами шунтирует пусковое сопротивление R1 и одновременно закорачивает катушку Р2 и с выдержкой во времени замыкает контакт в цепи КУ2. КУ2 шунтирует вторую ступень.
Выдержки времени своевременно отключают и колебания сети не страшны.
10.Замкнутые САУ. Общий принцип построения механической характеристике в замкнутой САУ
Выполняют следующие функции: плавный пуск, торможение и реверс; плавное регулирование скорости в широком диапазоне; стабилизация скорости при больших колебаниях нагрузки; стабилизация момента.
Всостав этих САУ входят трансформаторы, преобразователи; микропроцессоры и микроЭВМ. Стабилизация скорости и момента осуществляется за счет использования обратных связей. ОС могут передавать сигнал с выхода САУ на ее вход, с выходов отдельных звеньев. Также могут передавать производную или интеграл сигнала.
ОС бывают жесткие и гибкие. Жесткие работают в установившихся режимах. Гибкие в переходных (передают произв. или интеграл)
ОС бывают положительные и отрицательные. Полож-е при ↑ выходного сигнала усиливают его еще больше, а отрицательные уменьшают его.
Вразомкнутых САУ с ↑ нагрузки скорость ↓, а в замкнутых за счет ОС при изменении момента скорость может оставаться постоянной. Это происходит автоматически за счет увеличения напряжения источника питания двигателя.
Рассмотрим построение мех-й хар-ки ДПТНВ на примере САУ с отр-ой ОС по скорости.
Все ОС, независимо от рода передаваемого сигнала с помощью датчиков ОС этот передаваемый сигнал преобразуют в электрический, который и поступает на вход САУ либо отдельных звеньев. ОС, соединяющая выход САУ с ее входом называется главной (ГОС). ГОС – ОС по скорости практически во всех системах.
Датчиком такой связи, преобразующим скорость в электрический сигнал является тахогенератор, установленный на валу двигателя. Хар-ка тахогенератора
Kтг-к-т усиления тахогенератора.
На вход САУ подается входной сигнал Uвх, который будет постоянный в течение периода отработки приводом какой либо заданной технологической операции. А информация о текущем состоянии привода передается с выхода САУ на вход с помощью ОС.
∆U – сигнал рассогласования=Uвх-Uос поступает на блок управления У, с выхода которого управляющий сигнал Uу поступает на силовую часть преобразователя П. С выхода П на обмотки двигателя поступает рабочее давление Uп. Двигатель вращается, задает рабочий момент М, вращая рабочую машину РМ с помощью передаточного устройства ПУ и стремиться устранить рассогласование ∆U.
Для момента М1: ∆U=Uвх-Uос1(Е1)
Момент нагрузки ↑ до М2, ω↓ до ω2: ↑∆U=Uвх-Е2↓
Т.о. выходной сигнал преобразователя ↑, а значит ↑ ω0. Аналогично рассуждая момент нагрузки ↓ до М3. Соотв-но скорость ↑, Е↑, ∆U↓, ω0↓.
11.САУ с отрицательной ОС по напряжению
М-ДПТНВ; ТПтиристорный преобразователь, от которого получает питание цепь якоря двигателя; У- усилитель; РМ - рабочий механизм; УСузел
сравнения; ДН-датчик напряжения, с которого снимается напряжение обратной связи.
Система уравнений
 -напряжение на выходе узла сравнения, где α - коэффициент усиления обратной связи
-напряжение на выходе узла сравнения, где α - коэффициент усиления обратной связи
 напряжение в цепи якоря двигателя
напряжение в цепи якоря двигателя
 -противо-ЭДС двигателя
-противо-ЭДС двигателя
электромагнитный момент двигателя (К- машинная
постоянная)
Из решения системы
Если считать kу и kтп постоянными,то это ур-е прямой. 1-ый член определяет ω идеального х.х., пропорциональную Uз (хар-ки
3 и 3’)
При kc=kу*kп→∞ жесткость МХ в рассматриваемой системе не превосходит жесткости естеств.х-ки Д(х-ка 1), подключенного к сети с пост. Uд=сω0.Наибольший диапазон рег-я будет обуславливаться падением U в якорной цепи двигателя; статизм при нагрузке Мном определяется как отношение перепада ω к текущему значению ω идеального хх
На рис: естеств хар-ка Д 1,к которой стремится х-ка в замкн.систме рег-я при kc →∞; х-ка 2 в разомкн системе с учетом общего R якорной цепи Д и Преобр-ля; х-ки 3 и 3’в замкн.системе рег-я при конечном значении к-та усиления.
В данной системе посредством ОС компенс-ся ∆U на внутр Rпреоб-ля и колебания U сети, т.е. стабилизируется Uвых преобр. Поэтому предельной жесткостью х-ки явл-ся естеств х-ка Д
13.САУ с отрицательной обратной связью по скорости
Система уравнений, которыми описывается САУ в установившемся режиме
Где |
- к-т ОС; |
; |
В результате решения системы получено выражение для механической характеристики
-результ-й к-т усиления
ВЭП для удобства анализов используется понятие статизма
(наклон характеристики)
Из анализа выражения статизма следует, что при kс→∞, |
. |
Характеристика стремится занят положение || ох. Диапозон |
|
регулирования D=1000:1 |
|

12. САУ с положительной ОС по току
М-ДПТНВ; ТПтиристорный преобразователь, от которого получает питание цепь якоря двигателя; У- усилитель; УСузел сравнения. датчик тока в виде электрического шунта с
сопротивлением RШ . В качестве ДТ иногда используются дополнительные полюсы двигателя.
С шунта снимается напряжение обратной связи, пропорциональное току якоря
Eсли ввести обозначение  то
то
Система уравнений
β – коэффициент усиления ОС
 -противо-ЭДС двигателя
-противо-ЭДС двигателя
электромагнитный момент двигателя (К- машинная постоянная)
Решим систему, примем  , тогда уравнение мех-ой хар-ки
, тогда уравнение мех-ой хар-ки
Если к-ты усиления У и ТП постоянны, то х-ка Д прямая линия. 1
член определяет ω идеал.х.х., пропорц Uз (точки ид.х.х на ж-ах 2
и 2,)
Для определения статизма разделим 2 член правой части на 1 при Мном
Статизм =0 при КСβ =1(х-ка 3); для КСβ >1 х-ка м.б. восходящей(1), при КСβ <1 имеют отриц-ю жесткость(2). Если к-
ты усиления с ростом нагрузки падают, то х-ки становятся нелинмы(1! и 3!
15.Регулирование угловой скорости вращения в ЭП. Показатели регулирования.
Регулирование – преднамеренное изменение скорости с помощью управляющего воздействия. Здесь следует отличать изменение скорости при возмущающем воздействии.
Регулирование характеризуется рядом показателей качества регулирования.
1)диапазон регулирования D=ωmax/ ωmin
D=2:1,10:1,1000:1
Если Mc=const, ωmax=ωн
В реальных электроприводах нагрузка допускает колебания М относительно среднего значения.
ωmin принято отложить от (.) пересечения хар-ки двигателя и механизма (А). При этом хар-ка двигателя в (.) к.з. равна 2Мн. Это исходит из возможного колебания нагрузки до 2Мн.
2)плавность регулирования φ=ωi/ ωi+1
Число скоростей z→∞, то φ→1. Влияет на качество продукции, с ↓φ качество повышается.
3)экономичность регулирования η=Р2/( Р2+ΔР) 4)стабильность регулирования
Регулирование предусматривается введением Rд. При этом с учетом колебаний нагрузки М скорость будет так же допускать колебания Δω.
5)допустимая нагрузка – такая нагрузка, при которой привод работает длительное время без перегрева.
В ряде случаев при регулировании скорости требуется поддержание постоянства момента.
I зона Р1=UI - потребляемая, P2=Мдω – механическая на валу двигателя Р1=Р2+ΔР
Если пренебречь потерями, то Р1≈Р2 При регулировании скорости необходимо поддержать ток в
пределах допустимого (номинального). Т.о. при регулировании ток поддерживается постоянным.
Т.о. в I зоне регулирование скорости осуществляется регулированием U на обмотке якоря.
Однако, в ряде производственных механизмов при регулировании скорости требуется поддержание постоянства мощности.( II зона)
Т.о. регулирование скорости во II зоне осуществляется регулированием напряжения обмотки возбуждения.
16.Регулирование угловой скорости двигателя постоянного тока независимого возбуждения в системе Генератордвигатель
ОВГ, ОВД – обмотки возбуждения генератора,двигателя По 2 закону Кирхгофа обойдем контур
Из анализа уравнения 2 следует, что вместо нерегулируемого источника напряжения (ур-е 4) регулируемое напряжение Ег. Это основное достоинство системы Г-Д Недостатки системы:
1)из сравнения 2 и 4 следует, что в системе Г-Д в входит Rг, значит , а это означает, что характеристка в системе Г-Д мягче естественной.
2)добавляется две машины – АД и сам генератор. При расчете суммарных потерь системы Г-Д потери этих машин входят в общие потери системы Г-Д
Т.о. , создаваемого обмоткой возбуждения генератора В I зоне регулирования осуществляется Uвг. Во II зоне регулированием Uвд
17.Параметрическое регулирование угловой скорости
двигателей(введением Rд)
ДПТНВ ДПТПВ
14.САУ с отрицательной обратной связью по току с отсечкой.
САУ стабилизации момента используются в механизмах с непредсказуемой нагрузкой. Это САУ с – ОС по току с отсечкой формирует экскаваторную хар-ку
В номинальном режиме работы при протекании по обмотке якоря номинального тока падение U на Rш будет <Uотс, снимаемого на потенциометре 2.Т.о. работает основная обмотка управления ОУ1, которая создает магнитодвижущую силу Fоу. В случае резкого ↑ нагрузки ток якоря↑,а значит ↑∆U Rш. Равновесие изменилось >Uотс и под действием превосходящего ∆U Rш через диод Д стал протекать ток по ОУ2. МДС Fоу2 направлена навстречу Fоу1. Т.о. суммарная МДС резко ↓. Муп – упор (остановится)=2-2,5Мном
АД с фазным ротором
1)при введении Rд в цепь якоря и в цепь ротора скорость |
|
|
изменится, но момент нагрузки допускает колебания |
при |
|
колебаниях нагрузки |
будет увеличиваться. Это |
|
нежелательное явление для привода 2)такое регулирование ступенчатое (не плавное), где число
ступеней max 5. Регулирование осуществляется релейноконтакторной системой. На каждую степень свой контактор и реле.
3)такое регулирование неэкономично по сравнению с регулированием в системе Г-Д, где характеристик плавно перемещаются в зависимости от регулирования параллельно основной.
С ростом добавочных сопротивлений потери в виде тепла, выделяемые на этих сопротивлениях, увеличиваются.
Такой способ регулирования используется в крайнем случае.

18.Регулирование скорости вращения в системе тиристорный преобразователь – двигатель. Выпрямительный режим
Вся энергия, вырабатываемая синхронными генераторами на ТЭЦ и ГЭС – это Е переменного тока. Постоянный ток получают с помощью статических, вентильных (полупроводниковых) преобразователей, в которых вентили выполняют роль электрич. Ключей, пропуская ток в проводящую часть периода синусоиды и запирая цепи в непроводящую часть.
Тиристор – полупроводниковый вентиль, в котором начало пропускания тока можно регулировать, а запирается он автоматически, когда ток прекращает протекать через него.
Отпирается подачей |
отпирающего |
импульса на базовый |
электрод. |
Отсчет времени отпирания |
после подачи |
импульса идет от точки естественного отпирания вентиля (диода) и определяется вентильным углом α. В результате работы преобразователя получаем выпрямленные Ed,Ud,Id, представляющие собой среднее за период значение, а мгновенное значение этих параметров имеют несинусоидальный характер, слно возникают высшие гармоники, негативно влияющие на нагрев системы и коммутацию двигателя. Поэтому, с целью уменьшения высших гармоник, в цепь нагрузки включают сглаживающий реактор с большой индуктивностью.
Схемы соединения вентилей в преобразователях: 1)3-х фазная
Эквивалентная схема замещения
-активное и реактивное Rтрансформатора Е2 – ЭДС вторичной обмотки Выпрямленная ЭДС
m-число фаз
По истечении <α подаем отпирающий импульс
j – угол коммутации(I в 1 трансформаторе ↓,во 2 ↑) Е в тиристоре=полусумме ЭДС (отсюда полочка)
в любой момент времени I пропускает только один тиристор под действием фазного U (220 В)
2)мостовая схема
В этой схеме тиристоры 1-3-5 анодной группы, 2-4-6 катодной группы. В любой момент времени ток пропускают одновременно 2 тиристора под действием линейного U (380 В)
В мостовой схеме все выпрямленные величины в 2 раза >, чем в 3-х фазной, при этом количество тиристоров в 2 раза больше, но пульсации в выпрямленных величинах меньше, чем 3-х фазной Рассмотрим составляющие части падения напряжения 1.∆Uв=0,5-1 В – падение в вентиле
2.∆Uвт=Id(1-jm/4π)Rт≈ Id Rт – падение на активном сопротивлении трансформатора. M – число фаз, j – угол коммутации
3.∆Uхт= Id(Хт/(2π/m)) – падение в процессе коммутации
∆Uхт>>∆Uвт
19.Регулирование скорости вращения в системе тиристорный преобразователь – двигатель. Тормозные режимы
Упрощенная схема замещения С целью торможения увеличиваем <α, значит
↓Еп, следовательно нарушилось равновесие Еп и Ед, значит под действием превосходящего Ед ток должен протекать в
другом направлении, но ввиду односторонней проводимости преобразователя он не протекает и двигатель тормозится за счет нагрузки.
При достижении равенства Еп=IΣR+Eд двигатель под действием нагрузки останавливается. Такой процесс торможения весьма медлителен и неэффективен, поэтому с целью торможения на период его поменяем полярность Ед.
В этом случае при ↑α, а значит ↓ЭДС преобразователя ток будет протекать под действием превосходящей Ед. В этом случае получается высокое быстродействие торможения (противовключением). Однако Екин
вращающегося якоря превращается в тепловую, нагревая всю систему.
Поэтому на период торможения поменяем и полярность Еп. Тогда при нарушении равенства Еп и Ед ток будет протекать под действием Ед. При этом быстродействие торможения высокое, а Екин якоря преобразуется за счет Е вращ
двигателя в Iтормож. Преобразователь, работая в инверторном режиме, преобразует в переменный ток с последующей передачей его в сеть. Т.о реализуется генераторное торможение.
На практике этот режим реализуется с помощью двухкомплектных реверсивных преобразователей. Существуют две основные схемы соединения комплектов 1.Встречно-параллельное Р-уравнительные реакторы 2.Перекрестное Отличается тем, что каждый комплект
питается от своей вторичной обмотки трансформатора.
Управление комплектами бывает совместное и раздельное.
При совместном отпирающие импульсы подаются одновременно на оба комплекта. При этом, н-р на 1 к подается α1 от 0 до 90 (выпрямительный режим), а на 2к α2 90-180
(инверторный). α1+ α2=180.
Ток протекает по обмотке якоря, двигатель вращается и создает Евр. Тиристоры 2к при подаче на них импульсов отпираются, а т.к. ток через них не протекает, они тут же запираются. Они подготовлены в любой момент к работе в инверторном режиме. С целью торможения отпирающие импульсы с 1к снимаются и он запирается. якорь двигателя, вращаясь по инерции, продолжает создавать Евращ, под действием которой ток будет протекать через комплект 2к, формируя из постоянного I синусоид-й, который поступает в сеть. Т.о. реализован генераторный режим торможения с отдачей энергии в сеть. Недостатком является наличие уравнительных токов, протекающих в плечах комплектов за счет разности мгновенных значений фазных ЭДС комплектов.
С целью снижения уровней этих токов включаются уравнительные реакторы Р1 и Р2.
Характеристики имеют неразрывный характер,а быстродействие торможения высокая.
При раздельном управлении отпирающие импульсы подаются на один комплект, н-р на 1В. На 2 В не подаются. В этом случае при торможении импульсы с комплекта 1В снимаются, а на 2В они подаются по истечении времени восстановления запирающих свойств тиристоров комплекта 1В, что уменьшает быстродействие
торможения
Характеристики в зоне малых токов имеют разрыв. Это существенный недостаток, не позволяющий использовать такое управление в приводах с малыми токами. Преимущество– отсутствуют уравнительные токи, а значит и реакторы.На практике предпочтение отдается совместному
управлению.
20.Частотное регулирование скорости асинхронного двигателя с КЗ ротором
(изменение частоты питающей сети)
Возможность такого регулирования вытекает из выражения 1-статор
Частоту питающей сети регулируют с помощью тиристорных и транзисторных преобр. (ТПЧ).
Допустим,мы будем регулировать скорость, изменяя частоту при U1=const (на обмотке статора)
Пренебрежем , Т.о.
Рассмотрим 2 случая регулирования скорости изменением частоты:
1)с целью увеличения скорости увеличиваем частоту
Уменьшение Ф при моменте статического сопротивления Мс=const приведет к перегреву двигателя.
Мс=Мд в установившемся рабочем режиме
2-на обмотке ротора
Увеличение I2 приводит к перегреву двигателя
2)с целью уменьшения скорости частоту ↓, значит Ф↑. А это приводит к насыщению магнитопровода, а значит к росту тока намагничивания.
Т.о.рассмотрев два варианта делаем вывод: регулирование скорости изменением частоты при U1=const не возможно, поэтому нужно искать закон изменения U1 при частотном регулировании скорости.
Такой закон попытаемся установить, взяв в качестве критерия работоспособности двигателя на любой частоте перегрузочную способность
Запишем критерий для двух различных частот
Параметры с индексом i разделим на параметры с индексом k
Параметр с индексом k будем считать номинальным. Если любой параметр разделить на его номинальное значение, то он будет выражен в относительных единицах.
– полный закон
Костенко
1)q=0
Регулировочная характеристика
2)q=2
Вентиляторная характеристика
3)q=-2
Каждому механизму с его механической характеристикой соответствует свой закон управления, обеспечивающий работу двигателя на любой регулируемой характеристики
в номинальном режиме.
Такой метод регулирования наиболее перспективный. Максимальная скорость ограничивается механической прочностью ротора двигателя, а минимальная скорость ограничена возможностями получения синусоидального напряжения частотного преобразователя

1. Математическое описание элементов и систем управления
Математическим описанием являются уравнения статики (ур-ия установивш.режимов) и уравнения динамики (ур-ия переходных режимов). Физические величины, от которых зависят коэфф-ты ДУ, назыв-ся параметрами. Если параметры некот. элем. систем изм-ся во времени, то систему называют нестационарной или системой с переменными параметрами. В больш-ве случаев коэффициенты уравнения существенно не изменяются и системы являются системами с постоянными параметрами.
Удобной формой записи линейных дифференциальных уравнений является символическая или операторная. Переход к операторной форме осущ-ют введением сокращенного условного
обозначения операции дифф-ия:  Для составления ур-ий, система разб-ся на отдельные звенья и
Для составления ур-ий, система разб-ся на отдельные звенья и
для каждого из них записываются выражения относ-но входа и выхода. Совместное решение полученных уравнений дает мат.описание системы в целом.
Для лин. систем справедлив принцип суперпозиции, согласно которому уравнение выглядит:
Для получения анал-их решений, переходят от нелинейных ур-ий к приближенным линейным(линеаризация). В ее основе лежит предположение о том, что в процессе регулирования имеют место лишь малые отклонения от установившихся режимов. Линеаризация позв-ет перейти к уравнениям в приращениях и получить нулевые начальные условия. Для получения этих уравнений необходимо записать ур-ия статики, затем равновесие считать нарушенным и записать ур-ия динамики с учетом приращения всех переменных.
X0, Y0 – установ.знач.; дельты – приращения.
Из уравнений динамики вычитаются уравнения статики и получаются уравнения приращения
-ур-е динамики
-ур-е статики
-вычитаем.
В общем случае используется формула разложения в ряд Тейлора. При этом предполагают, что движение происходит в пределах малых отклонений, а все производные имеют единственное и конечное значение, отличное от 0.
Пренебрегают слагаемыми 2 и выше степеней отклонения переменных и вычитает уравнение статики получают уравнение в приращениях
Решение уравнений динамики: Вид линеариз.уравнения сис-мы:
Xвых,Xвх,f – отклон-ия упр-ой перем-ой управл. и возмущающ.возд-ия от их установ-ся знач.
Решения УД :аналитические, графо-аналит-ие, численные. Аналитические:
Свободная составляющая находится из решения ОДУ вида:
 . Уравнение вынужден.переменн.при скачкообразном вход. возд-ии хар-ет установив.режимы., опр-ся правой частью уравнения.
. Уравнение вынужден.переменн.при скачкообразном вход. возд-ии хар-ет установив.режимы., опр-ся правой частью уравнения.
Временные характеристики:
1)Переходная характеристика h(t) – реакция звена или системы на един-ый ступенч. сигнал, который описывается:
График завис. Хвых(t) прямая параллельная оси х.
2)Импульсная перех.характер-ка – реакция звена(системы) на единич.импульсный сигнал:
Использование преоб-ий Фурье и Лапласа.
Любая ф-ция, удовл-ая усл-м Дирихле, являющ-ся периодич-ой с периодом Т,
мб разложена в ряд Фурье.
Непериод-ая ф-ция может рассм-ся как периодич. с периодом
. Используются 2 формулы: -Прямого преобр-ия Фурье:
-Обратного преобр-ся Фурье: |
|
|
|
|
|
|
|
|
|
||
Если в формулу прям.преобр. |
Фурье ввести показат.ф-цию |
, |
|||
получится новая ф-ла прямого преобразования Лапласа: |
|
||||
- |
|
|
|
|
|
-Обратного |
преобразования |
Лапласа: |
|
||
Получение операторного уравнения
Для получения операт.ур-ия по известному ДУ нужно знать начальные условия.
Если н.у. нулевые,то операторное уравнение мб получено из ДУ путем замены символа дифф-ия оператором Лапласа.
А,В,С -соответ-ие
полиномы.
Передаточная функция:
Передаточная ф-ция – отношение изображений по Лапласу вых.и вх. переменных при н.н.у.
Передаточная ф-ция по управл.возд-ию:
Передаточная ф-ция по возмущ-му.возд-ию:
Передаточ.ф-ция не зависит от вида внешнего возд-ия, а зависит только от параметров элементов, составл-их систему. В передаточной ф-ции степень полинома числителя не должна превышать степень полинома знаменателя.
2. Частотные характеристики элементов и систем управления
Частотной функцией называется отношение изображений Фурье выходного и входного сигнала. Частотная функция по управляющему воздействию:
Частотная функция (ЧФ) может быть получена из передаточной с заменой P на j что эквивалентно преобразованию Лапласа к преобразованию Фурье. Графическое изображение частотной функции называется частотной характеристикой. Частотные характеристики описывают передаточные свойства элементов и систем в режиме установившихся гармонических колебаний, вызванных внешним гармоническим воздействием.
Если числитель и знаменатель ЧФ умножить на комплексносопряженное знаменателю уравнение, то выделяется веществ.и мнимая состав-ие:
По указанным составляющим мб построена амплитудно-фазовая частотная характеристика (АФЧХ). АФЧХ – г.м.т. концов вектора на комплексной плоскости при изменении частоты от -
до .
ЧФ мб представлена в показательной форме:
– амплитудно – частотная характеристика (АЧХ)
-фазо – частотная характеристика (ФЧХ).
–вещественная частотная характеристика (ВЧХ)
-мнимая частотная характеристика (МЧХ).
Логарифмические частотные характеристики Если ЧФ, представленную в показательной форме прологарифмировать, то
Отсюда видно, что при исследовании СУ пользуются 2 характеристиками:
1.Логарифмическая амплитудно-частотная характеристика (ЛАЧХ)
2.ЛФЧХ При их построении исп-ся десятичные логарифмы. Для
построения ЛАЧХ в оси ординат в равномерном масштабе
откладывается  (Дб)
(Дб)
В реальных системах в качестве упр-ых переменных используются напряжения и токи, которые находятся в квадратичной зависимости по отношению к мощности:
Изменению мощности в 10р соответствует изменение указан. величин в 100 раз, что соотв-ет 2 Белам или 20дБ.
По оси абсцисс откладывается частота в логарифмич.масштабе:
Для построения ЛФЧХ на оси ординат отклад-ся в равномерном масштабе величина фазы в градусах.
При построении ЛАЧХ исп-ся асимптотические хар-ки, сост-ие из отрезков прямых линий с опр-ым наклоном, кратному 20. Наклон асимптот выр-ся в дБ на декаду.

3. Общие условия устойчивости непрерывных САУ
Под устойчивостью понимается способность системы возвращаться в исходное или близкое к нему состояние после исчезновения внешних воздействий. Пусть система описывается след. линеаризованным ДУ:
Свободная составляющая, определяющая динамику системы, находится из однородного ДУ:
Система устойчива, если
Корни характеристического уравнения (к.х.у.) могут быть вещественными, комплексными, чисто мнимыми. Если веществые корни отрицательны, то переходный процесс затухает монотонно; если положительны, то монотонно возрастает.
отрицательные корни
положительные корни
 мнимые корни Для устойчивости линейной САУ необходимо и достаточно,
мнимые корни Для устойчивости линейной САУ необходимо и достаточно,
чтобы все кху имели отрицательные вещественные корни. Для устойчивости линейной САУ необходимо и достаточно,
чтобы все кху лежали слева от мнимой оси. Система будет находится на границе устойчивости при наличии нулевого или пары чисто мнимых корней. В случае нулевого корня в ХУ будет отсутствовать нулевой член
В этом случае устойчивость определяется относительно скорости изменения управляемой переменной. Значение управляемой переменной мб произвольным. Такая устойчивость – нейтральная.
Если в ХУ имеется пара чисто мнимых корней, то система находится на границе чисто колебательной устойчивости. Необходимым, но недостаточным условием устойчивости является положительность коэффициентов ХУ.
Характеристическое уравнение это знаменатель передаточной функции, равный нулю. ХУ записывается в виде:
При перемножении сомножителей получим уравнение с положми коэфф-ми.
Данное условие является необходимым и достаточным для устойчивости систем 1 и 2 порядка.
4. Общие условия устойчивости импульсных САУ
Решение разностного уравнения
Устойчивость определяется свободной составляющей которая находится:
Если подставить в однородное уравнение, то после преобразований получим ХУ:
Свободная составляющая будет стремиться к нулю, если все корни ХУ по модулю <1 ( ) и число тактов
Процесс будет затухающим монотонным при положительных корнях и затухающим колебательным при отрицательных.
Если то система неустойчивая. Если хотя бы один из корней ХУ (+) и по модулю >1, то процесс будет монотонно расходящимся.
Если отрицательным, то:
Для устойчивости линейной импульсной САУ необходимо и достаточно, чтобы все корни ХУ были по модулю <1.
При дальнейшем изменении частоты вектор z будет описывать окружность. Границей устойчивости плоскости параметра z является окружность.
т.е. область устойчивости – внутр.часть круга с R=1. Для устойчивости линейных импульсных системы необходимо и достаточно чтобы все КХУ располагались
внутри круга с R=1.
5. Алгебраические критерии устойчивости для непрерывных САУ
Критерии устойчивости делятся на алгебраические и частотные. По алгебраическим КУ можно определить устойчивость с помощью коэффициентов ХУ.
Критерий Рауса. Для определения устойчивости необходимо составить таблицу Рауса по следующим правилам:
В 1-й строке записыв-ся коэффициенты ХУ с четными индексами, начиная с a0, во второй – коэффициенты с нечетными индексами. Каждая послед-ая строка заполняется по алгоритму:
Общее число строк в таблице Рауса на порядок >ХУ.
Для устойчивости линейной САУ необходимо и достаточно, чтобы все коэффициенты таблицы Рауса 1 столбца были положительны. По этому критерию можно определить кол-во корней с положительной вещественной частью. Оно равно числу перемен знака в 1 столбце.
Критерий Гурвица. Для определения устойчивости необходимо составить определитель Гурвица:
1)По главной диагонали записывается в порядке возрастания индексы, начиная с . Определитель заполняется по столбцам. Вниз по главной диагонали записываются коэффициенты с убывающим индексом, вверх – с возрастающим. Недостающие заполняются нулями.
Формулировка: Для устойчивости линейной САУ необходимо и достаточно, чтобы определитель Гурвица и его диагональные миноры были положительными.
Если все определители низших порядков положительны, то система будет находиться на границе устойчивости, если старший определитель =0.
– система на границе апериодической устойчивости;
- на границе колебательной устойчивости.
С помощью этого критерия можно найти критическое значение любого параметра, при котором система находится на границе устойчивости. Считая искомый параметр неизвестным, составляется критерий Гурвица, затем, принимая решают его относительно искомого параметра.
6. Особенности использования алгебраических критериев устойчивости для импульсных САУ.
Использование алгебраических критериев по характ.урав-ию в z- изображении не представляется возможным, поэтому
необходимо перейти к v – преобразованиям:
При переходе к v – преобразованию окружность R=1 вновь отображается в мнимую ось.
Характеристическое уравнение  становится однозначной функцией и для определения устойчивости можно воспользоваться любым алгебраическим критерием.
становится однозначной функцией и для определения устойчивости можно воспользоваться любым алгебраическим критерием.
Условие устойчивости по Гурвицу:

7. Частотные критерии устойчивости для непрерывных САУ
Критерии устойчивости делятся на алгебраические и частотные. В основе всех частотных критериев лежит принцип аргумента. Пусть характеристический полином имеет вид:
Каждый сомножитель характеристического полинома можно представить на комплексной плоскости в виде вектора, проведенного из точки
в произвольную точку P.
Вращение вектора против часовой стрелки положительное. Тогда при изменении частоты от - до + вектор, соответствующий левому корню повернется на угол π, а правому – на угол –π.
Критерий Михайлова.
Пусть хар-ий полином имеет вид:
При изменении частоты |
будет перемещаться в |
комплексной плоскости. |
|
Условие необходимо, но недостаточно для устойчивости системы. В устойчивой системе не дб корней обращающих в ноль
вектор |
. |
|
|
|
|
|
Для устойчивости |
линейной САУ |
|||
|
необходимо и достаточно, чтобы |
||||
|
вектор |
|
|
при |
изменении |
|
частоты от 0 до повернулся от |
||||
|
начала |
координат |
против часовой |
||
|
стрелки, нигде не обращаясь в ноль |
||||
|
на угол |
|
. |
|
|
|
|
|
|
||
|
При |
практических |
расчетах |
||
|
определяется ХУ, в котором P |
||||
|
заменяется |
на |
и |
выделяется |
|
вещественная и мнимая составляющие. По ним при изменении частоты от 0 дона комплекс.плоскости строится годограф Михайлова, по его виду определяется устойчивость системы на основании след.формулировки: для устти лин-ой САУ необх.и дост-но,чтобы
годограф при изменении частоты от 0 до начинаясь на вещ-ой
(+) полуоси проходил послед-но против час.стрелки, нигде не обращаясь в ноль, n квадрантов.
Критерий Найквиста
позволяет определить устойчивость замкнутой системы по частотным
характеристикам разомкнутой системы.
Пусть передаточная функция разомкнутой системы имеет вид:
8. Особенности использования частотных критериев устойчивости для импульсных САУ.
Частотные критерии устойчивости позволяют определить устойчивость по виду соответствующей частотной характеристики.
Критерий Михайлова.
Пусть характеристический полином имеет вид:
– корни характеристического уравнения.
Угол поворота вектора |
от |
будет складываться |
|
из углов поворота элементарных сомножителей |
. |
||
Если все корни внутри окружности , то суммарный угол поворота равен .
Если корень располагается вне единичной окружности, то угол поворота равен нулю, суммарный угол поворота будет меньше
.
Для устойчивости линейной системы необходимо и достаточно чтобы вектор при изменении частоты от
повернулся против часовой стрелки вокруг начала координат на угол .
При практических расчетах находится ХУ:
9. Синтез параллельных корректирующих устройств
Синтезом называется выбор параметров и структуры так, чтобы она удовлетворяла заданным показателям качества регулирования. Если система неустойчива или не удовлетворяет заданным показателям, то производится коррекция. Различают непрерывные, дискретные корректирующие устройства.
Непрерывные корректирующие устройства делятся на последовательные и параллельные.
Параллельная коррекция включается либо параллельно ИЭ или НЧ, либо в виде местных обратных связей.
ИЭ |
НУ |
|
|
КУ |
КУ |
|
ИЭ |
НУ |
|
|
КУ |
КУ |
|
Выделяются вещественная и мнимая составляющие:
При изменении частоты от 0 до |
на комплексной плоскости |
строится годограф Михайлова и по его виду определяется устойчивость в соответствии с формулировкой.
Для устойчивости импульсной САУ необходимо и достаточно, чтобы годограф Михайлова при изменении частоты от 0 до
начинаясь на вещественной положительной полуоси, проходил последовательно в положительном направлении, нигде не обращаясь в ноль, 2m квадрантов.
Критерий Найквиста. Позволяет определить устойчивость замкнутой системы по частотной характеристике разомкнутой системы. Находится дискретная передаточная функция разомкнутой системы:
Рассмотрим вспомогательную функцию:
Здесь  – характеристический полином замкнутой системы.
– характеристический полином замкнутой системы.
 – характеристический полином разомкнутой системы.
– характеристический полином разомкнутой системы.
Изменяя параметры КУ можно так деформировать ЛАЧХ системы, что она станет устойчивой и будет удовлетворять заданным показателям качества регулирования.
Линейные системы:
Паралл.коррекция включается в виде местных обратных связей, как правило отрицательных. Охватывает звенья с наибольшим коэффициентом усиления или постоянной времени. При охвате более 2 звеньев нужно проверить на устойчивость внутренн.контур. КУ включаются как можно ближе ко входу системы.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Передаточная |
|
функция |
контура |
с |
местной |
ОС |
|||||||||
|
|
|
переписать с заменой |
. |
|
|
|
|
|
||||||
Для наиболее существенной области частот справедливо |
|
||||||||||||||
неравенство: |
|
|
|
(1) |
Тогда |
|
|
|
|
||||||
Структурная схема выражается: |
|
|
|
|
|
|
|||||||||
Пусть ХУ разомкнутой системы имеет L правых и (n-l)левых корней. Согласно принципа аргумента, получим
Если замкнутая система будет устойчивой, то m=0,
Замкнутая система устой-ва, если частотная характеристика вспомогательной функции охватывает начало координат раз.
Переходя от вспомогательной функции к частотной ф-ции разомкнут. системы, формулируется критерий Найквиста.
Если разомкнутая система неустойчивая, имеет L правых корней, то для устойчивости замкнутой САУ необходимо и достаточно, чтобы АФЧХ разомк. системы при изменении частоты от 0 до (от 0 до ) охватывала точку с
координатами (-1;j0) в положительном направлении L/2 раз.
В логарифмических:
Для определения устойчивости необходимо построить ЛАЧХ и ЛФЧХ разомкнутой системы. Устойчивость замкн. САУ оценивается по взаимному положению этих характеристик с учетом того, что устойчива или неустойчива разомкнутая система.
Формулировка:Если разомкнутая система устойчива, то для устойчивости замкнутой САУ необходимо и достаточно, чтобы ЛФЧХ разомкн.системы пересекала линию -180 справа от частоты
среза.
Если разомкнутая система неустойчивая, имеет L правых корней, то для устойчивости замкнутой САУ необходимо и достаточно чтобы разность м-у
числом положительных и отрицательных переходов ЛФЧХ разомкн.системы через линию -180 в диапазоне частот, где L( ) >0, была равна L/2.
Предположим что ХУ разомкнутой системы имеет l корней вне окружности единичного радиуса, тогда
Если замкнутая система будет устойчивой, то
С учетом этого, вспомогательная функция при изменении частоты
Переходя от вспомогательной функции к частотной функции разомкнутой системы, формул-ся критерий Найквиста:
Если разомкнутая система неустойчива, имеет l корней вне окружности R=1, то для устойчивости замкнутой САУ необходимо и достаточно чтобы ЧХ системы при изменении
частоты от 0 до охватывала точку с координатами (-1;j0) раз в
положительном направлении (1).
1.
2.
Если разомкнутая система устойчива, то для устойчивости замкнутой САУ необходимо и достаточно, чтобы ЧХ разомкнутой системы при изменении частоты от 0 до не
охватывала точку с координатами (-1;j0) (2).
Динамические свойства контура с местной ОС определяются только характеристикой КУ. Передаточная ф-ция разомкнутой системы с паралл.корр.имеет вид:
 переписать с заменой.
переписать с заменой.
При выполнении условия (1) можно пренебречь единицей и частотная функция будет иметь вид:

10. Синтез последовательных корректирующих устройств.
Синтезом называется выбор параметров и структуры так, чтобы она удовлетворяла заданным показателям качества регулирования. Если система неустойчива или не удовлетворяет заданным показателям, то производится коррекция. Различают непрерывные, дискретные корректирующие устройства.
Непрерывные корректирующие устройства делятся на последовательные и параллельные. Последовательная коррекция включается либо на входе импульсного элемента, либо на входе непрерывной части системы.
И  К
К  Н
Н
К  И
И  Н
Н
Последовательная коррекция изменяет частотные свойства непрерывной части системы. Тот же эффект м.б. достигнут изменением формы импульса. В этом случае, в систему включается дополнительный формир.элемент, рассматриваемый как последовательное КУ.
При синтезе дискретная система заменяется непрерывной, динамика которой близка к импульсной, что справедлив в том случае, если частота коммутации является большой и в системе имеются инерционные элементы.
Расчетная структурная схема импульсной системы имеет вид: При достаточно малых значениях Т можно перейти:


 1
1

 W
W Wн
Wн
1 

 W
W  Wн
Wн
Синтез проводится методами линейных непрерывных систем, например метод ЛЧХ.
Линейные системы:
Последовательная коррекция включается последовательно в основной контур регулирования. Его включают либо после звена сравнения, либо после предварительного усилителя. Структурная схема имеет вид:
Передаточная функция разомкнутой системы: |
11.Метод фазовой плоскости
Метод фазовой плоскости относится к точным методам исследования нелинейных САУ. Состояние системы в любой момент времени t определяется управляемой переменной и ее (n- 1) производной. Если эти величины отложить на осях координат, то полученное n – мерное пространство называется фазовым пространством. Состояние системы в каждый момент t определяется точкой, котор. Называется изображающей. Во время переходного процесса изобр-ая точка перемещается в фаз.простр-ве по фазовой траектории.
В установившемся режиме точка находится в состоянии покоя и называется особой точкой. Совокупность фазовых траекторий для различных начальных условий совместно с особыми точками называется фазовым портретом системы.
При исследовании системы данным методом структурная схема преобразуется к виду:
НЭ
x
ЛЧ  x1
x1
Где ЛЧ это линейная часть системы, НЭ нелинейный элемент.
С помощью |
|
перейдем от уравнения 2 порядка к 2 |
|
уравнениям 1го порядка
Разделив 2 уравнение на 1, получим
Если удастся найти аналитическое выражение y=f(x), то можно построить для разных н.у. семейство фазовых траекторий, т.е. получить фазовый портрет.
Свойства фазовых траекторий:
1.Изображающая точка в верхней полуплоскости движется слева направо,а в нижней справа налево. (по часовой стрелке)
2.Фазовая траектория пересекает ось абсцисс под 90
град.
3.Фаз.траектории не пересекаются между собой, за исключением особых точек.
Типы особых точек: узел, фокус ,центр, седло.
Изоклиной называется ГМТ фаз.плоскости, которые фаз.траектория пересекает под одним и тем же углом. При использовании метода изоклин нелинейная характеристика разбивается на линейные участки и для каждого из них записывается лин. ДУ. Правая часть уравнения приравнивается к константе и решается относительно переменной У, в результате будет получено уравнение изоклины. Построение ведется так,чтобы фаз.плоскость была заполнена равномерно изоклинами.
На каждой изоклине изображается вспомогательная кривая под углом α к ох
Полученные точки соединяются плавной кривой, в результате строится фазовая траектория
12.Метод гармонической линеаризации
В основе метода гармонической линеаризации лежит принцип гармонического баланса, основанный на гипотезе фильтра и предположении о гармоническом характере свободного движения системы. При использовании данного метода структурная схема должна быть преобразована к виду:
НЭ
x
ЛЧ  x1
x1
Рассмотрим прохождение гармонического сигнала через разомкнутую гармоническую систему.
x0 |
|
y |
|
|
x |
|
НЭ |
|
|
ЛЧ |
|
|
|
|
|
||
|
|
|
|
|
|
Сигнал периодический, поэтому м.б. разложен в ряд Фурье:
Если нелинейность симметричная, то А0 = 0. На лин-ую систему подается сигнал, содержащий весь спектр частот, каждая гармоника сигнала действует независимо от других. На выходе лин.части появятся колебания, содержащие те же частоты, как на входе, амплитуды будут различны. Для исследования степени изменения амплитуды строится АЧХ линейной части системы. Если амплитуда основной гармоники несоизмеримо больше амплитуд гармоник, то лин.часть явл-ся фильтром и гасит все высшие гармоники.
Гармоническая линеаризация заключается в том, что записывается ряд Фурье для выходной характеристики для НЭ, в котором учитывается только 1 гармоника. В результате получается аналитическая линейная зависимость, между входом и выходом нелинейного звена. Для однозначной симметричной нелинейности записывается:
Для неоднозначной симметричной нелинейности:
Для замкнутой системы:
Кн – коэффициент гармонической линеаризации
нелинейного звена.
Для неоднозначной:
Кн - коэффициент гармонич. линеаризации, учитывающий производную от нелинейной функции

13.Критерий устойчивости Найквиста на комплексной плоскости
Критерий Найквиста позволяет определить устойчивость замкнутой системы по частотным характеристикам разомкнутой системы.
Пусть передаточная функция разомкнутой системы имеет вид:
Пусть ХУ разомкнутой системы имеет L правых и (n-l)левых корней (для ИС l корней вне окружности R=1). Согласно принципа аргумента, получим
Замкнутая система устой-ва, если частотная характеристика вспомогательной функции охватывает начало координат раз.
Переходя от вспомогательной функции к частотной ф-ции разомкнут. системы, формулируется критерий Найквиста.
Если разомкнутая система неустойчивая, имеет L правых корней (l корней вне окружности R=1), то для устойчивости замкнутой САУ необходимо и достаточно, чтобы АФЧХ разомк. системы при изменении частоты от 0 до (от 0 до ) охватывала точку с координатами (-1;j0) в положительном направлении L/2 раз.
Правила перехода:
1.Переход частотной характеристикой разомкнутой системы ч-з вещественную ось слева от точки (-1;j0) считается полож-ым, если он происходит сверху вниз. Если разомкнутая система неустойчива и имеет l равных корней, то для устойчивости замкнутой САУ необходимо и достаточно, чтобы разность м-у числом + и – переходов частот. характеристикой разомкнутой системы ч-з вещественную ось слева от точки (- 1;j0).
2.Если разомкнутая система устойчивая, то для устойчивости замкнутой САУ необходимо и достаточно, чтобы
АФЧХ от 0 до (от 0 до ) не охватывала точку (-1;j0).
14.Критерий устойчивости Найквиста в логарифмических координатах
Для определения устойчивости необходимо построить ЛАЧХ и ЛФЧХ разомкнутой системы. Устойчивость замкн. САУ оценивается по взаимному положению этих характеристик с учетом того, что устойчива или неустойчива разомкнутая система.
Формулировка:Если разомкнутая система устойчива, то для устойчивости замкнутой САУ необходимо и достаточно, чтобы ЛФЧХ разомкн.системы пересекала линию -180 справа от частоты среза.
Если разомкнутая система неустойчивая, имеет L правых корней, то для устойчивости замкнутой САУ необходимо и достаточно чтобы разность м-у числом положительных и отрицательных переходов ЛФЧХ разомкн.системы через линию -180 в диапазоне частот, где L( ) >0, была равна L/2.
Импульсные системы: ЛЧХ можно пользоваться на основе v- преобраз-ий, отображ. окружность r=1 в мнимую ось. v=(z- 1)/(z+1). При получим
15.Критерий абсолютной устойчивости для систем с устойчивой линейной частью.
|
|
|
ЛЧ |
|
Формулировка критерия: |
|
|
|
|
|
|
||
|
|
|
|
|
Для абсолютной устойчивости |
положение |
|
|
|
|
|||
|
|
|
|
|
равновесия нелинейной САУ с устойчивой |
|
|
|
|
НЭ |
|
ЛЧ достаточно выполнение |
следующих |
|
|
|
|
условий: |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
1.Существование действительного числа при котором вещественная часть ф-ции Попова будет положительной.
2.
Принадлежность нелинейной характеристики сектору [0,k], т.е.
 Для получения области устойчивости вводится понятие видоизмененной частотной характеристики: л , которая связана с обычной частотной характеристикой след. соотношениями:
Для получения области устойчивости вводится понятие видоизмененной частотной характеристики: л , которая связана с обычной частотной характеристикой след. соотношениями:
Правая часть является комплексной, то и левая тоже 
При изменении от 0 до π/T * изменится от 0 до . Передаточная функция:
По этим выражениям строится ЛЧХ:
Если разомкнутая система неустойчивая, имеет l корней, то для устойчивости замкнутой САУ необходимо и достаточно,чтобы разн.между числом + и – переходов φ( *) через линию -180 в диапазоне частот, где L( *)>0, была равна l/2.
16.Отличие статической и гармонической линеаризации
Линеаризация – это замена нелинейного звена эквивалентным ему линейным с сохранением основных свойств нелинейного звена. Применяются два основных способов линеаризации:
для несущественных нелинейностей – статическая линеаризация (разложением в ряд Тейлора)
для существенных нелинейностей – гармоническая (разложением в ряд Фурье).
Гармоническая линеаризация заключается в том, что записывается ряд Фурье для выходных характеристик для НЭ, в котором учитывается только первая гармоника. В результате получается
аналитическая линейная зависимость между входом и выходом нелинейного звена.
При статической линеаризации используется формула разложения в ряд Тейлора, учитываются только первые слагаемые. При этом предполагают, что движение происходит в пределах малых отклонений, а все производные имеют единст-ое и конечное значение, отличное от нуля.
С учетом этого
Если |
то это уравнение прямой линии |
прох-ей ч-з точку с координатами  , котор.касается видоизмененная ЧХ.
, котор.касается видоизмененная ЧХ.
 , то видоизмененная ЧХ располагается справа от этой прямой.
, то видоизмененная ЧХ располагается справа от этой прямой.
Формулировка критерия:
Для абсолютной устойчивости положения равновесия нелинейной САУ с устойчивой ЛЧ достаточно, чтобы на комплекс.плоскости можно было провести ч-з точку с координ.
0 прямую так, чтобы видоизмен. ЧХ полностью располагалась справа от этой прямой.
Критерий абсолютной устойчивости только достаточный, дает лишь часть области устойчивости и его невыполнение не означает отсутствие абсолютной устойчивости.
17.Принципы управления
Выделяют три основных принципа, используемых при управлении объектами.
1)Принцип разомкнутого управления или разомкнутого цикла. В системах, работающих по этому принципу, реальные значения выхода у(t) объекта не учитываются управляющим устройством, что не позволяет обеспечить высокую точность управления.
2)Принцип компенсации или управления по возмущению. В этих системах производится измерение возмущающих воздействий v(t), и результаты измерений учитываются при выработке управления u(t), что позволяет повысить точность автоматической системы.
3)Принцип обратной связи (ОС), который предусматривает
сравнение выхода y(t) c задаваемым значением yзад(t) с помощью канала обратной связи и элемента сравнения.