

Программно-алгоритмический комплекс
Для расчета этих моментов был создан программно-алгоритмический комплекс
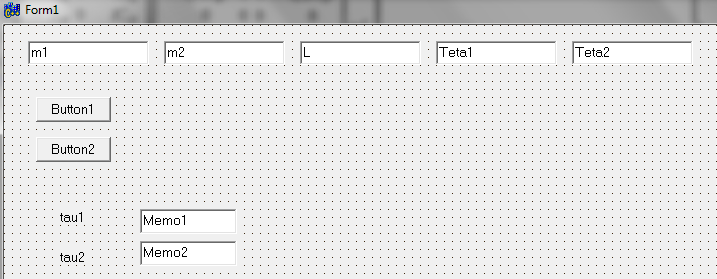
m1,m2 - массы звеньев манипулятора
L1= L2 = L - длины звенев манипулятора
 -
углы поворота звеньев относительно
начала координат
-
углы поворота звеньев относительно
начала координат
Tau1 Tau2 - моменты которые создаются каждым звеном манипулятора
Листинг программы
#include <vcl.h>
#pragma hdrstop
#include "Unit1.h"
#include "Math.h"
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma resource "*.dfm"
TForm1 *Form1;
double t1;
double t2;
float m1;
float m2;
float l;
double C1;
double C2;
double C12;
float g = 9.8;
double S2;
float teta1;
float teta2;
double teta1_uskr = 0;
double teta2_uskr = 0;
float teta1_spd = 0;
float teta2_spd = 0;
//---------------------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
Memo2->Clear();
Memo1->Clear();
}
void __fastcall TForm1::Button1Click(TObject *Sender)
{
m1 = StrToFloat(Edit1->Text);
m2 = StrToFloat(Edit2->Text);
l = StrToFloat(Edit3->Text);
teta1 = StrToFloat(Edit4->Text);
teta2 = StrToFloat(Edit5->Text);
C1 = cos(teta1*3.1416/180);
C2 = cos(teta2*3.1416/180);
C12= cos(teta1 + teta2);
S2 = sin(teta2*3.1416/180);
}
void __fastcall TForm1::Button2Click(TObject *Sender)
{
double a_t1;
double d_t1;
double c_t1;
double a_t2;
double d_t2;
double c_t2;
a_t1 = ((1/3)*m1*l*l + (4/3)*m2*l*l + m2*C2*l*l)*teta1_uskr + ((1/3)*m2*l*l + (1/2)*m2*l*l*C2)*teta2_uskr;
d_t1 = (1/2)*m2*S2*l*l*teta2_spd*teta2_spd + m2*S2*l*l*teta1_spd*teta2_spd;
c_t1 = (1/2)*m1*g*l*C1 + (1/2)*m2*g*l*C12 + m2*g*l*C1;
t1 = a_t1 - d_t1 + c_t1;
a_t2 = ((1/3)*m2*l*l + (1/2)*m2*l*l*C2)*teta1_uskr + ((1/3)*m2*l*l)*teta2_uskr;
d_t2 = (1/2)*m2*S2*l*l*teta1_spd*teta1_spd;
c_t2 = (1/2)*m2*g*l*C12;
t2 = a_t2 + d_t2 + c_t2;
Memo2->Clear();
Memo1->Clear();
Memo1->Text=t1;
Memo2->Text=t2;
Вывод
С помощью уравнений Лагранжа-Эйлера мы получили систему нелинейных дифференциальных уравнений, описывающую динамику движения манипулятора. Применение полученных уравнений для расчета сил и моментов, которые должны быть созданы силовыми приводами в сочленения манипулятора для реализации заданной траектории движения, с вычислительной точки зрения представляет большие трудности, для этого был создан программно-алгоритмический комплекс, который существенно упрощает задачу.