

3 Реализация проекта
3.1 Физика движения автомобиля
Для изучения движения автомобиля на повороте чаще всего используются модели на основе теории бокового увода . Эти модели нашли широкое применение при описании машин с межколесными дифференциалами, движущимися практически без скольжения колес.
Однако, для учета скольжения колес по грунту предлагается применить методику моделирования криволинейного движения тракторных агрегатов, где любое транспортное средство (ТС) рассматривается как управляемый объект, криволинейное движение которого определяется наложенными на него связями, обеспечиваемыми конструкцией и системой управления .
С грунтом ТС (автомобиль) взаимодействует посредством плоских площадок, число которых равно числу колес (4 пятна контакта). В каждом контакте возникают силы и момент трения.
Нашей задачей и является рассчитать эти силы и моменты.

Ширина колеса практически не меняется с нагрузкой , поэтому ее берём из стандартного обозначения шины. Длину следа можно рассчитать по теореме Пифагора. Поскольку прогиб колеса зависит от его конструктивных параметров , внутреннего давления в шине и вертикальной нагрузки на колесо. Из этого следует, что длину колеса можно посчитать следующим образом.

Для позиционирования МЦС введем следующие системы координат:
общая система для всего ТС, с началом в центре поворота(x0,y0);
четыре местные системы для каждой опорной площадки, с началом координат в геометрическом центре следа (xi,yi);
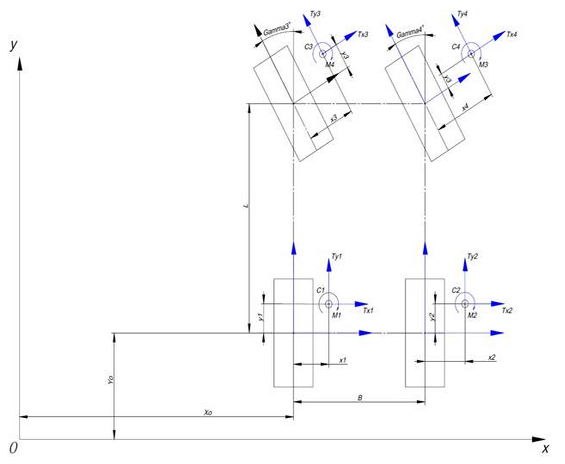
Рисунок 3.1 – Расчетная схема поворота
Запишем координаты МЦС всех колес в общей системе координат, связав тем самым общую и местные системы координат.

Составим систему уравнений криволинейного движения произвольного ТС.
Три уравнения движения для стационарного поворота (криволинейного движения с постоянной угловой скоростью и радиусом поворота) имеют вид.

Три уравнения движения для стационарного поворота (криволинейного движения с постоянной угловой скоростью и радиусом поворота) имеют вид. При вращательном движении скорость любой точки корпуса перпендикулярна радиус-вектору, опущенному из центра поворота машины [4]. Поскольку в МЦС скольжение отсутствует, то скорость корпуса над этой точкой равна теоретической скорости, которая направлена всегда вдоль плоскости вращения колеса. На основе этого можно записать уравнения геометрических связей, отражающих то, что МЦС площадок контакта колес лежат на перпендикулярах, опущенных из центра поворота на плоскости вращения колес. Для задних колес (углы поворота относительно корпуса равны нулю). Еще три уравнения кинематических связей описывают взаимодействие узлов трансмиссии и рулевого управления. Так для переднеприводного автомобиля наличие межколесного дифференциала на передней оси характеризует равенство крутящих моментов, что при равных радиусах колес соответствует равенству тяговых усилий. Поскольку задние колеса являются ведомыми, то на них отсутствуют тяговые усилия.
В результате решения системы уравнений (3.5 – 3.9) с учетом выражений силовых факторов (3.1 - 3.3) и преобразования координат (3.10 – 3.12) получим неизвестные координаты МЦС всех колес (х1, у1, х2, у2, х3, у3, х4, у4) и центра поворота (х0, у0). Используя эти значения можно найти все силы и моменты[6].