

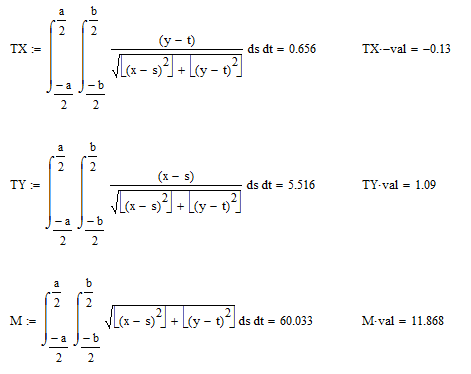
3.2 Расчет моментов и сил трения действующих на колесо
Все расчеты производились в приложении Mathcad.
Mathcad - программное средство, среда для выполнения на компьютере разнообразных математических и технических расчетов, снабженная простым в освоении и в работе графическим интерфейсом, которая предоставляет пользователю инструменты для работы с формулами, числами, графиками и текстами. В среде Mathcad доступны более сотни операторов и логических функций, предназначенных для численного и символьного решения математических задач различной сложности.
Mathcad имеет интуитивный и простой для использования интерфейс пользователя. Для ввода формул и данных можно использовать как клавиатуру, так и специальные панели инструментов.
Несмотря на то, что эта программа, в основном, ориентирована на пользователей-непрограммистов, Mathcad также используется в сложных проектах, чтобы визуализировать результаты математического моделирования путем использования распределённых вычислений и традиционных языков программирования. Также Mathcad часто используется в крупных инженерных проектах, где большое значение имеет трассируемость и соответствие стандартам. ad
Расчеты координат
(x1,y1).
Расчеты координат
(x2,y2).
Расчеты координат (x3,y3).

Расчеты координат (x4,y4).

3.3 Расчет максимальной скорости прохождения поворота
Определим силу, при которой автомобиль начнет уносить с траектории движения на повороте: mgµ = 1,1 * 9,81 * 0,5 = 5,395 Н.
Рассчитаем силы, действующие на автомобиль при прохождении поворотов на максимальной скорости:
R= 0,6 м;C= 2πR= 3, 768 м.
T= 1/f= 1,88.
ω= 2π/T= 3,328 м/с.
V= 2πR/T= 1,99 м/с.
Fц=mV2/R= 7,3 Н.
|
Радиус |
Линейная скорость |
Угловая скорость |
Центробежная сила |
|
60 см |
1,99 |
3,33 |
7,3 |
|
45 см |
1,98 |
4,4 |
9,7 |
|
30 см |
1,99 |
6,66 |
14,66 |

Из расчетов видно, что центробежная сила намного превышает максимально допустимую[5]. Найдем такое значение скорости, чтобы можно было пройти поворот на максимально высокой скорости:
V= √µRg= √0,5 * √0,6 * √9,81 = 1,71 м/с.
ω=V/R= 2,85 м/с.
Fц = mV2/R = 5,36 Н.
|
Радиус |
Линейная скорость |
Угловая скорость |
Центробежная сила |
|
60 см |
1,71 |
2,85 |
5,36 |
|
45 см |
1,48 |
3,28 |
5,35 |
|
30 см |
1,21 |
4,03 |
5,37 |
Центробежная сила не превышает максимально возможного значения, при этом автомобиль проходит поворот на максимально допустимой скорости.

Заключение
На данном этапе изучен комплект, предоставляемый для участия в соревнованиях Freescale. Построена математическая модель гоночного автомобиля, произведены расчеты скорости, сил и моментов для дальнейшей работы. На основе полученных данных планируется реализовать алгоритм для прохождения трассы.
Список использованной литературы:
Freescale Semiconductor [Электронный ресурс] URL:http://www.freescale.com/ (дата обращения: 7.04.2014)
Street Smarts - High Performance Engineering [Электронный ресурс] URL:http://streetsmarts.freescale.com/ (дата обращения: 7.04.2014)
Linear Sensor Array [Электронный ресурс] URL:http://www.ams.com/eng/LinearSensorArray (дата обращения: 7.04.2014)
Datasheet search site for Electronic Components and Semiconductors and other semiconductors. [Электронный ресурс] URL:http://www.alldatasheet.com/ (дата обращения: 7.04.2014)
Математическая модель движения переднеприводного автомобиля в режиме стационарного поворота. [Электронный ресурс] URL:http://sibac.info/10941 (дата обращения: 8.05.2014)
Яблонский А. А., Никифорова В. М. Курс теоретической механики: Учебник. 9-е изд., стер. – СПб.: Издательство «Лань», 2002. – 768с.