

-
Системная шина
Магистральный способ предполагает организацию единой унифицированной системы шин, к которой подключаются все устройства (модули системы). Магистраль двухшинная: мультиплексируемая шина данных/адреса (AD) и шина управления (C).
-
шина данных/адреса 32-разрядная и содержит двунаправленные линии, по которым может производиться обмен 32-разрядными словами, а так же адресация ОП и ПУ.
-
шина управления включает следующие линии: синхронизация SYNC, строб входной информации DIN, строб выходной информации DOUT, адресация ОП или ПУ MOI, считывание или запись RW, ответ RPLY, сигнал сброса RST, запрос ПДП DMR, разрешение ПДП DMG, подтверждение разрешения ПДП SACK. Также в эту шину входят линии: запрос прерывания IRQ и подтверждение прерывания INTA.
При разработке на схемном уровне могут быть добавлены сигналы в шину управления, здесь же указываются сигналы, необходимые для описания взаимодействия модулей системы.
Передача по магистрали может начаться только после захвата шины и снятия сигнала SYNC предыдущей операции. Захват шины ПУ, если не используется ПДП, осуществляется через систему прерывания [1]. Захват шины:
-
ПУ выставляет запрос на прерывание.
-
Процессор выставляет сигнал DIN и выдает сигнал разрешения прерывания INTA.
-
Первое на пути распространения сигнала INTA ПУ, выставившее запрос прерывания, блокирует его дальнейшее распространение и снимает сигнал IRQ, посылает сигнал RPLY и затем выставляет на шине адреса/данных адрес вектора прерывания.
-
Процессор принимает адрес вектора прерывания, последовательно снимает сигналы DIN и INTA.
-
ПУ снимает с шины адрес вектора прерывания.
-
Процессор реализует прерывание текущей программы и переход к прерывающей программе.

Рис. 1 Временная диаграмма захвата шины
На диаграмме (этой и следующих) представлена последовательность установления и снятия сигналов, а временные параметры устанавливаются на схемном уровне, обеспечивая корректную работу всех узлов.
В каждый момент времени передача информации через интерфейс может происходить только между двумя устройствами, причем одно из них является задатчиком (ведущим), а другое – исполнителем. Рассмотрим взаимодействие двух модулей системы при выполнении операции чтения. Задатчиком является ЦП или ПУ, исполнителем – ОП или ПУ.[1]
-
Задатчик после освобождения интерфейса выставляет: адрес на AD, сигнал MOI в зависимости от типа исполнителя (ОП или Пу).
-
Задатчик выставляет сигнал SYNC, указывающий всем устройствам, присоединенным к магистрали, что магистраль занята, задан тип операции и на AD выставлен адрес.
-
Устройство, обнаружившее на шине свой адрес, воспринимает предписанный ему тип операции (сигнал RW говорит о типе операции) и становится исполнителем.
-
Задатчик с задержкой, необходимой для распознавания ПУ своего адреса, снимает с AD адрес и сигнал MOI и выставляет сигнал DIN.
-
Исполнитель в ответ на сигнал DIN выставляет сигнал RPLY и после этого считывает и выставляет на AD данные.
-
Задатчик после поступления сигнала RPLY с необходимой задержкой принимает (стробирует) информацию с линий AD (снимает DIN). Задержка должна быть достаточной для того, чтобы ПУ успело выставить на AD достоверные данные.
-
Исполнитель, восприняв сброс DIN, снимает сигнал RPLY и данные с AD. Этим завершается отключение исполнителя от магистрали.
-
Задатчик в ответ на снятие сигнала RPLY снимает сигнал SYNC, освобождая интерфейс.
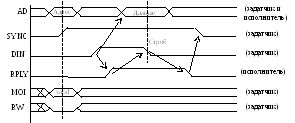
Рис. 2 Временная диаграмма операции считывания
При выполнении операции записи первые три пункта такие же как при чтении:
-
Задатчик с задержкой, необходимой для распознавания ПУ своего адреса, снимает с AD адрес и сигнал MOI, выставляет данные на AD и сигнал DOUT.
-
Исполнитель, восприняв сигнал DOUT, принимает информацию и выдает сигнал RPLY.
-
Задатчик с задержкой, необходимой для установления достоверных данных на входе исполнителя, снимает сигнал DOUT, а затем и данные, выполняя требуемые времена удержания.
-
Исполнитель в ответ на снятие DOUT, снимает RPLY и тем самым отключается от магистрали.
-
Задатчик в ответ на снятие RPLY, снимает SYNC, освобождая магистраль.
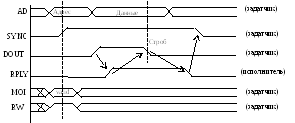
Рис. 3 Временная диаграмма операции записи
Как уже отмечалось, сигнал MOI задает адресацию ОП или ПУ. Используем два отдельных адресных пространства: ОП и ПУ. Это позволяет адресовать большую емкость памяти и упрощает схемы дешифрации адреса.
Сигнал общего сброса RST должен подаваться в первую очередь при включении ЭВМ, он должен переводить все модули системы в начальное согласованное состояние путем выполнения микропрограммы инициализации.